Რობოტები არის დამახასიათებელი მაशინები, რომლებიც შეძლებენ განხორციელებას რазличных დავალებების, უწყვეტლად მარტივი დავალების მსგავსი საფრთხეების გასწორებისა და უფრო რთული სამუშაოს, როგორიცაა მანქანების შემუშავება შეკრების ხაზზე. სენსორები არის იმ რამდენიმე, რაც ხდის რობოტებს უნიკალურს. გარი, სერვოები და მოტორები ხდილობით და მოქმედებით ხდინა რობოტებს. ისინი ხასიათებს რობოტს იმით, რომ ის შეძლებს ნახავს, გამოისაუბროს და გარკვეული ინფორმაციის შესაბამისად განახლებს — რაც არის საჭირო ინფორმაციის შესაბამისად და განმარტებულად განახლებისთვის.
Რობოტები გამოიყენებენ რამდენიმე ტიპის სენსორს, რათა უფრო კარგად შეძლონ განიხილონ თავიანთი გარემო. ზოგი სენსორი განიხილავს სინათლს, ხმებს ან ჰითის, მაგალითად. სხვები შეიძლება განაზღვრონ რამდენად შორისაა რაღაც, როგორ მოძრაობს ან მოძრაობს თუ არა. თითოეული სენსორის ტიპი აქვს თავისი სპეციფიკური დავალება. ეს განსხვავებულობა შესაძლებლობას აძლევს MINYUE-ს ai რობოტი შესრულება განსხვავებული დავალებები კუმულაციით მოვალე და ზუსტი, რაც ხდის მათ საკმარისად გამოსახატელს ბევრ აპლიკაციაში.

Რობოტების მსგავს მსოფლიოს შეხედის კიდევ ერთი ელემენტი არის სენსორული ტექნოლოგია. მაგალითად, სენსორები შეიძლება დახმარონ რობოტს, როცა ის გადაადგილებს თავს ჩამორჩმულ წერაში, არ დააზღვის ადამიანებს ან ადგილებს — რაც არის გარკვეული მასალის მიმართული მეთოდი. ისინი შეიძლება ასევე შესაძლო გახდეს MINYUE-ს, რომ მოწყობილობები მიიღოს და მათ მართლაც მართავდეს, რათა არ ჩავიჭროს ან არ დაარღვიან ნებისმიერი რამე. ინტელექტუალურად განათლებულ რობოტებს სენსორები რობოტებს გაძლევენ საჭირო ინფორმაციას მათ გარემოს შესახებ, რათა ისინი განსაზღვრონ განათლებულ გადაწყვეტილებებს და აangepდენ ახალ და ცვლილებადი სიტუაციების შემთხვევაში.
Და ბევრი სენსორები ჰქონდეს განსხვავებული ძალები და არიან საშუალებადი განსხვავებული სამსახურებისთვის. მაგალითად, ინფრაწითელი სენსორები სასმენია სიგრძეს, ამიტომ ისინი მარტივად განისაზღვრებენ ტემპერატურას ან შეძლებენ თьობში რამეს პოვნას. ულტრასანდროვი სენსორები გაზომენ მანძილს სანდროს გამოყენებით და მიწოდებენ რობოტებს ინფორმაციას მათ გარემოში მდებარე მაგალითების გარეშე გადასვლის შესახებ ან მოკლე ადგილებში ჩასვლისთვის. MINYUE ლაზრის სენსორის კამერა რობოტებს აძლევა გამოყენება ფოტოებისა და ვიდეოების ჩაღწევას, რათა მიუწვდომელი ინფორმაცია იყო მათი გარშემოკეთებების შესახებ. როდესაც რობოტებმა ერთად გამოიყენებენ რამდენიმე ტიპის სენსორები, მათ უფრო კარგად იქნება შეხედვა მათი გარშემოკეთებებში. რезультатად, მათ შეუძლია სწრაფად და უფრო ზუსტად განახორციელონ სამსახურები.

Წინადადე, რობოტები ჰქონდა მარტივი ფუნქციები მათი სენსორული ტექნოლოგიის გამო, რომელიც იყო სუსტი. მათ შეუძლია განახორციელონ მარტივი სამსახურები, მაგრამ სირთულის სამსახურები? არა შანსი. მაგრამ ბოლო წლებში სენსორული ტექნოლოგიაში განხილულია დიდი გამართლება. იმ დროიց მართლაც, რობოტებმა შეუძლია განახორციელონ ბევრად სირთულის სამსახური, ვიდრე წინ. ტექნოლოგიის განვითარებით, ჩვენ უკვე ნახავთ განათლებულ სენსორებს, რომლებიც დახმარება რობოტებს ანალიტიკურ საშუალებით.
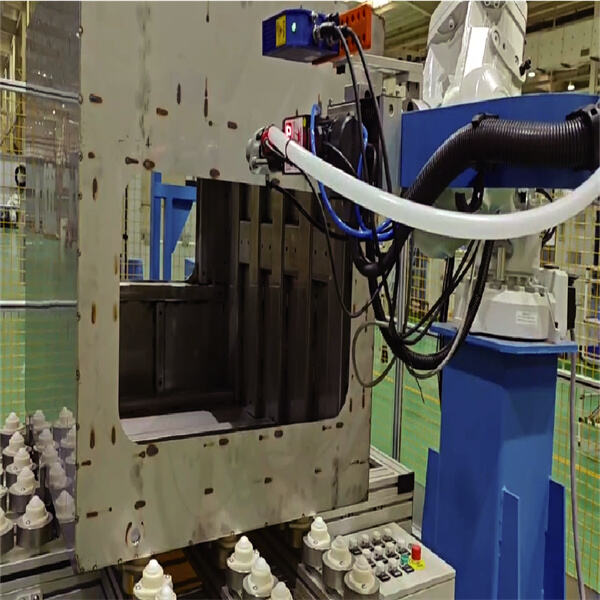
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








