 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



Ინტელექტუალური პროგრამირების გარეშე MIG სველების რობოტული სისტემა, სველების გაკეთება მეტად მარტივად.
Minyue Technology განახორციელა განვითარებული ტექნოლოგიები, როგორიცაა ლაზრის შეკრების სისტემის გადამოწმება, ინტელექტუალური პროგრამირების სისტემა მოკლე რეჟიმში, 3D ვიზუალური სკანირების სისტემა და რობოტის ინტელექტუალური შეკრების პროცესური ბაზა. განსხვავებული სცენარები შეიცავს შებრუნების მოდელირებას და 3D გეომეტრიული ორმოდიან რეჟიმი.
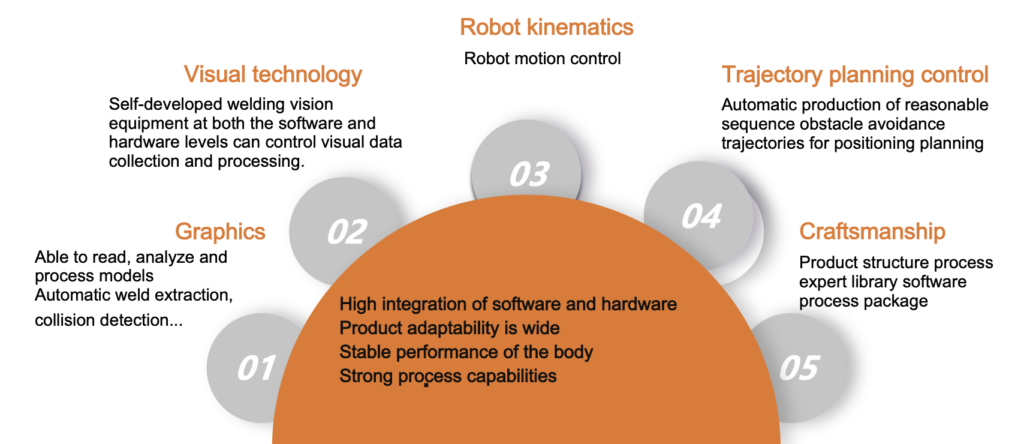
- Გენერალური ინფორმაცია
- Ინტელექტუალური გამორთვა და სიმულაციის სისტემა გარეშე
Რობოტული შეკრება გახდა ძირითადი ინსტრუმენტი როგორც მართვის ინდუსტრიებში. თუმცა, სწორი პროგრამირება ასევე თამაშობს გარკვეულ როლს მისი წარმატების გარანტირებისას. დავალება: ’ნახეთ რამდენიმე განსა Gaussian პროგრამირების გარეშე რობოტული შეკრების მარტივად.
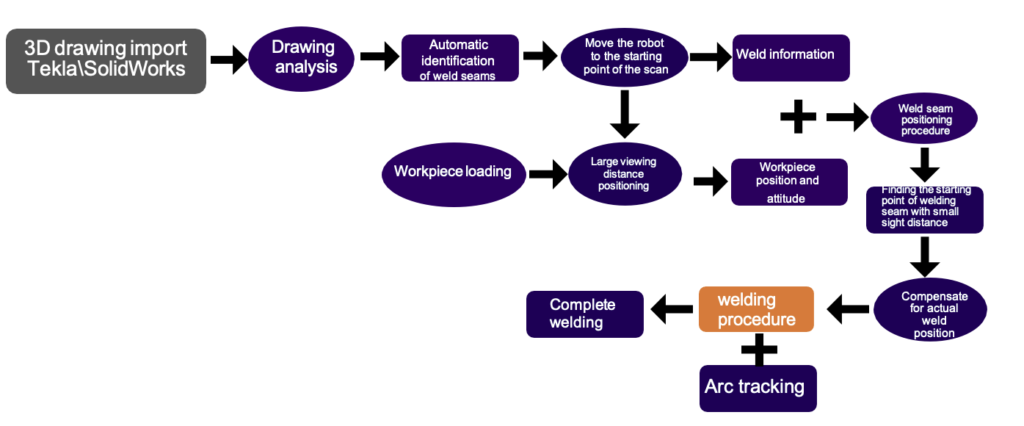
Სწორი რობოტისა და პროგრამული უზრუნველყოფის выбор: პროგრამირების დაწყების წინ, არის საჭირო შესაბამისი რობოტისა და პროგრამირების პროგრამული უზრუნველყოფის არჩევა თქვენს სვარკვევის აპლიკაციისთვის. დარწმუნდით, რომ არჩეული რობოტი აკმაყოფილებს თქვენი სვარკვევის პროექტის სპეციფიკურ მოთხოვნებს. ’s ძვირთად არის არჩეული რობოტისა და პროგრამირების პროგრამული უზრუნველყოფის არჩევა თქვენს სვარკვევის აპლიკაციისთვის. დარწმუნდით, რომ არჩეული რობოტი აკმაყოფილებს თქვენი სვარკვევის პროექტის სპეციფიკურ მოთხოვნებს.
Minyue Technology-მ გამოარჩენილა განვითარებული ტექნოლოგიები, როგორიცაა ლაზრის სვარკვევის გამოსავლეთის სისტემა, გონიერი ოფლაინ პროგრამირების სისტემა, 3D ვიზუალური სკანირების სისტემა და რობოტის ინტელექტუალური სვარკვევის პროცესური ბიბლიოთეკა . განსხვავებული სცენარიებისთვის შეუსაბამისად მოდელირების და 3D გეომეტრიული დუალური რეჟიმის იმპორტით.
Ოფლაინ პროგრამირება (OLP): განიხილეთ ოფლაინ პროგრამირების (OLP) გამოყენება საბრალო საერთაშორისო სვარკვევის პროექტებისთვის. OLP-ს გამოყენებით შეგიძლიათ პროგრამიროთ და სიმულიროთ რობოტის ’მოძრაობები და სვარკვევის ამოცანები ვირტუალურ გარემოში, რაც შემცირებს შეცდომების რისკს რეალურ სვარკვევის მოქმედების დროს.
Სველდინგის კობოტები: OLP-ს გარდა, სველდინგის კობოტები (კოლაბორაციული რობოტები) შეიძლება გამართლონ სველდინგი ბოლო მომხმარებლისთვის. ეს რობოტები შეძლებენ მუშაობას ადამიანურ ოპერატორებთან ერთად, გათავისუფლებული საშუალებებით და მარტივი გამოყენებით.
Გამოხმაურება და სინერგიული ფუნქციები: სამოდერნო სველდინგის წყაროები გაძლევენ ღია გამოხმაურებას სველდინგის პროცესზე. ისინი ჩამოიღებენ “სინერგიული ” ფუნქციები, რომლებიც უზრუნველყოფენ მუდმივ სველდინგის ხარისხს. ეს გამოხმაურების მექანიზმი დახმარება მუდმივ და მაღალი ხარისხის სველდინგების მართვაში, შემცირებს მუდმივი გამოსავალების საჭიროებას.
Ზუსტი კალიბრირება: საუკეთესო ზუსტების აღწერა სველდინგის პოზიციაში ძვირად არის გარემო. ზუსტი კალიბრირება სველდინგის უჯრისა და მაशინური ვიზუალური სისტემების გამოყენება შეიძლება დაარწმუნოს, რომ თქვენი რობოტი სველდინგის გაკეთებს განსაკუთრებული ზუსტებით.

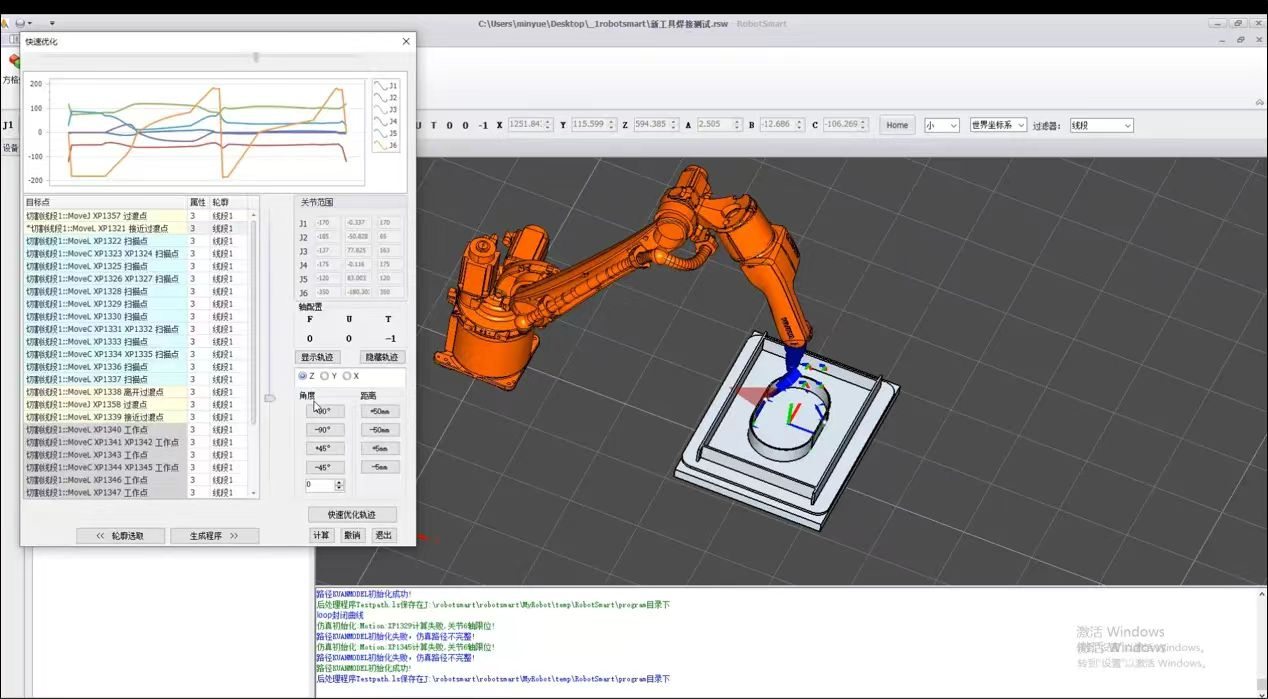
Განიარებით რობოტების სართული პროგრამირებით ზედაპიროვან დამუშავებისთვის?
Ჩვენი უახლესი დემო ნაჩვენებს, თუ როგორ ჩვენი პროგრამის გარეშე და ადაპტიური ვიზუალური რობოტული ამოხსნა, გამართლებს პროგრამის გარეშე სველდინგს და კუთხის გაჭრის ზუსტობითა და ერთმანეთში გათავისწობილი. განვითარებული 3D ხედის ტექნოლოგიისა და ავტომატური ინსტრუმენტური გზის გენერირების ინტეგრაციით, ჩვენი სისტემა აღარ აძლევს დადგენილობას და რობოტის პროგრამირების სირთულეებს.
Ძირითადი მახასიათებლები:
1. ავტომატური ინსტრუმენტური გზის გენერირება უზრუნველყოფს სწრაფ და კოდის გარეშე რობოტის პროგრამირებას სირთულეების მუშაობისთვის.
2. Ერთი გამოტანის საშუალებით სველი ერთიანების დამოკიდებულება და მühლობით გამოსახავს ზედაპირის დასრულების პარამეტრებს, მათ შორის EOAT-ის კუთხე, სიჩქარე და ნაბიჯის მანძილი. Მრავალფეროვანი სველი პროცესების ბიბლიოთეკა განსხვავებული სველის სიტუაციებისთვის
3. გადაჭრის, მიღწევის და კოლიზიის შეზღუდვების გადასაჭრივად გამოიყენეთ ერთი წკაპით, რათა უზრუნველყოფოს EOAT-ის კუთხის შენარჩუნება მოლოდის დიაპაზონში.
4. კოორდინაცია მრავალაქსიანი მოძრაობებისთვის სინქრონული მოძრაობისთვის და ზუსტობის უზრუნველყოფა სიერთიანი ინსტრუმენტის სიჩქარით.
5. Ინტელიგენტური Ვიზუალური სისტემა აღნიშნავს ზედაპირის ანომალიებს და გენერირებს გარკვეული რობოტის გზები მიზნების მიერ განმარტებული მუშაობისთვის, უწყვეტ შემოწმებით უზრუნველყოფს ერთმანეთში გათავისწობილი ხარისხი.
Არ არის სირთული კოდი. არ არის მიმდინარე დაგვიანებები. მხოლოდ სიჩქარე, ზუსტობა და ეფექტიურობა წარმოებაში.
Კოოპერატიული პარტნიორი

Იურიდიული პირის მხარდაჭერა რობოტის ბრენდი






