Რობოტული სველის ცელი შედგება რამდენიმე კომპონენტისაგან, რომლებიც ერთმანეთთან ინტერაქცია ხდებიან, რათა ჩატარონილი იყოს სველის პროცესი. პირველი ნაწილი არის რობოტი. რობოტი არის მექანიკური ხელი, რომელიც აკეთებს სრულად სველს. იგი დაკავშირებულია კომპიუტერთან, რომელიც ისახავს მას, სად უნდა დაესვა და როგორ უნდა ძალაობდეს. რობოტის ხელის ბოლოს მდებარეობს სველის იнструმენტი, რომელიც აძლევს მას შესაძლებლობას მეტალურგიული ნაწილების ერთმანეთს დასველა.
Კომპანიები გამოიყენებენ რობოტულ სველის ცელებს, რათა დახარჯონ ქარხნები სწრაფად და ეფექტურად. ერთ-ერთი მარტივი მხარე ისინისაა, რომ ისინი შეძლებენ მუშაობას სრულ დროს გარკვეული შეწყვეტების გარეშე. ეს ნიშნავს, რომ ისინი შეძლებენ წარმოებას სწრაფად, ვიდრე ადამიანური მუშაობის შემთხვევაში. ეს ქარხანა მilikiს რამდენიმე რობოტი, რომლებიც შეძლებენ მუშაობას უწყვეტ რეჟიმში, რაც ადამიანების შემთხვევაში არ შეიძლება, რადგან ისინი უნდა ძირვები ან აღარ მუშაობენ ზუსტ დროს.

Ზუსტობის საკითხზე, რობოტულ სველის ცელები ასევე საკმარისად მั่ნამდებია. ისინი არ გახდებიან უწყვეტი, როგორც ადამიანები, ამიტომ შეძლებენ განგრძელებას გრძელი პერიოდის განმავლობაში შეცდომების გარეშე. არსებობს ასეთი ერთმანეთზე დამოკიდებულობა
Რობოტულ სველის ცელები განახლებს ქარხნის მუშაობას და ხელს უწყობენ ფინანსებში. ისინი დაბალავируют მუშაობის ხარჯებს, რადგან შეძლებენ მუშაობას ადამიანური მუშაობის გარეშე. მწარმოებლობისთვის, როგორც მაგალითად, მწარმოებლობაში მუშაობის ხარჯები
Minyue-ზე არსებობს რამდენიმე ტიპის რობოტული სველის ცელები. ისინი ხელმისაწვდომია განსხვავებული ზომებით, მოიწყებიან მცირე მაशინები, რომლებიც შეძლებენ მცირე პროექტების ჩამოთვლას, და დიდი მაशინები, რომლებიც არის მასალად დიდი სამუშაო პროექტებისთვის.
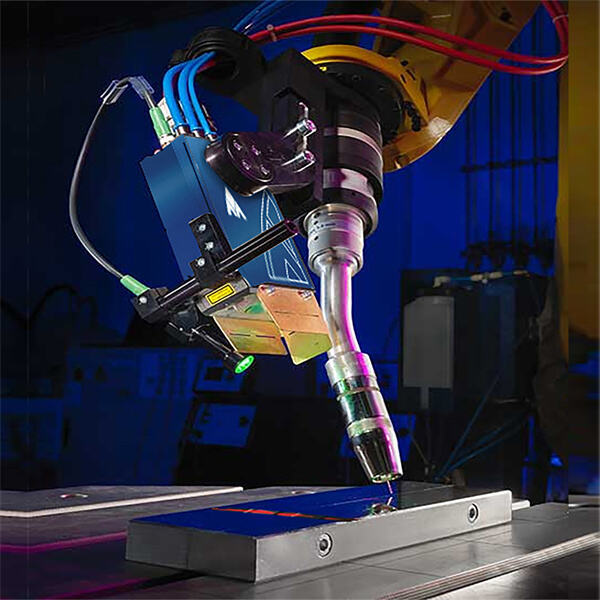
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
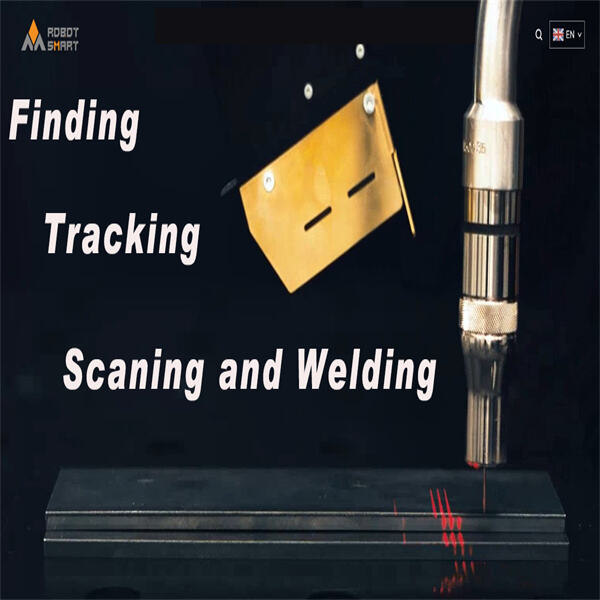
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK
