 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



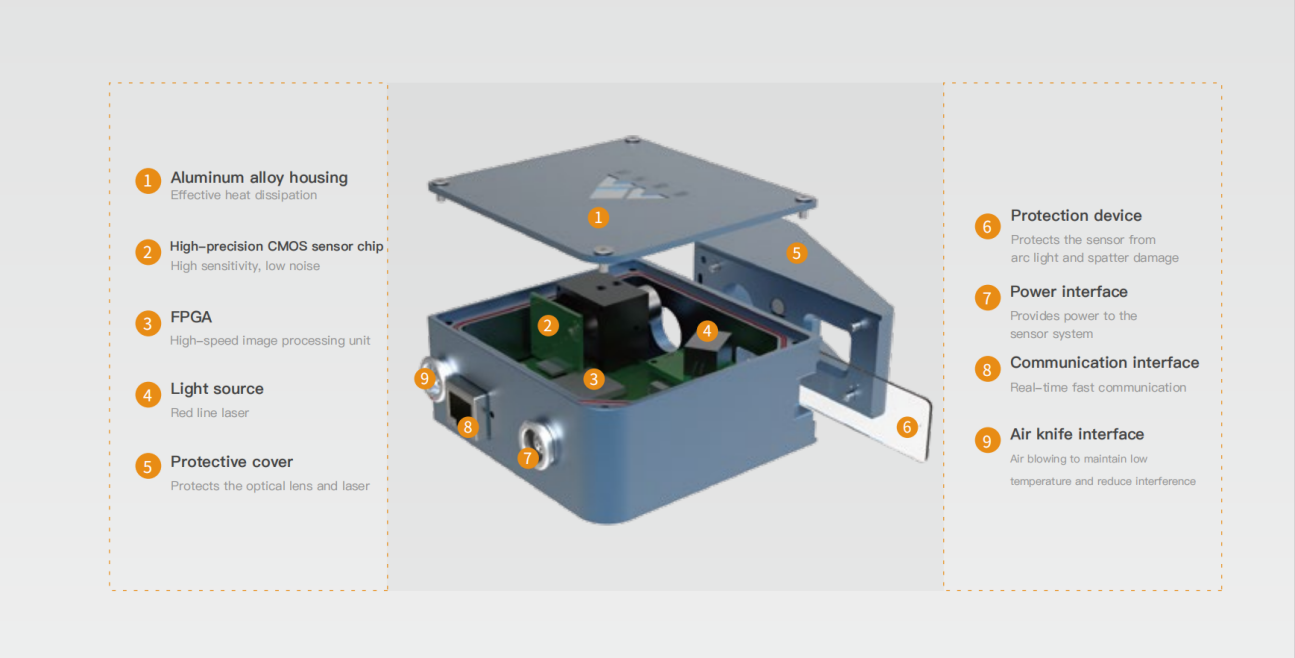
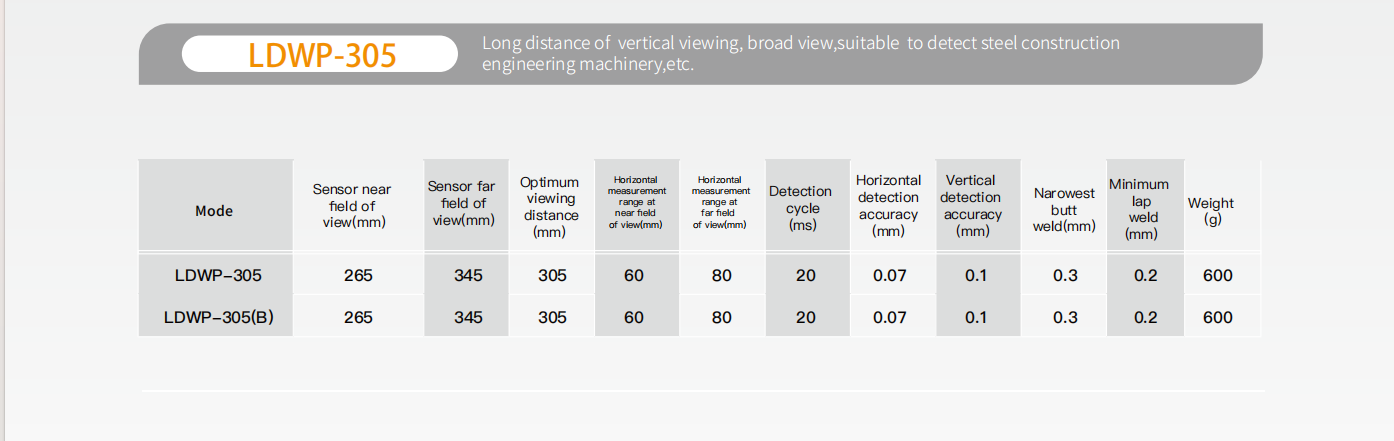
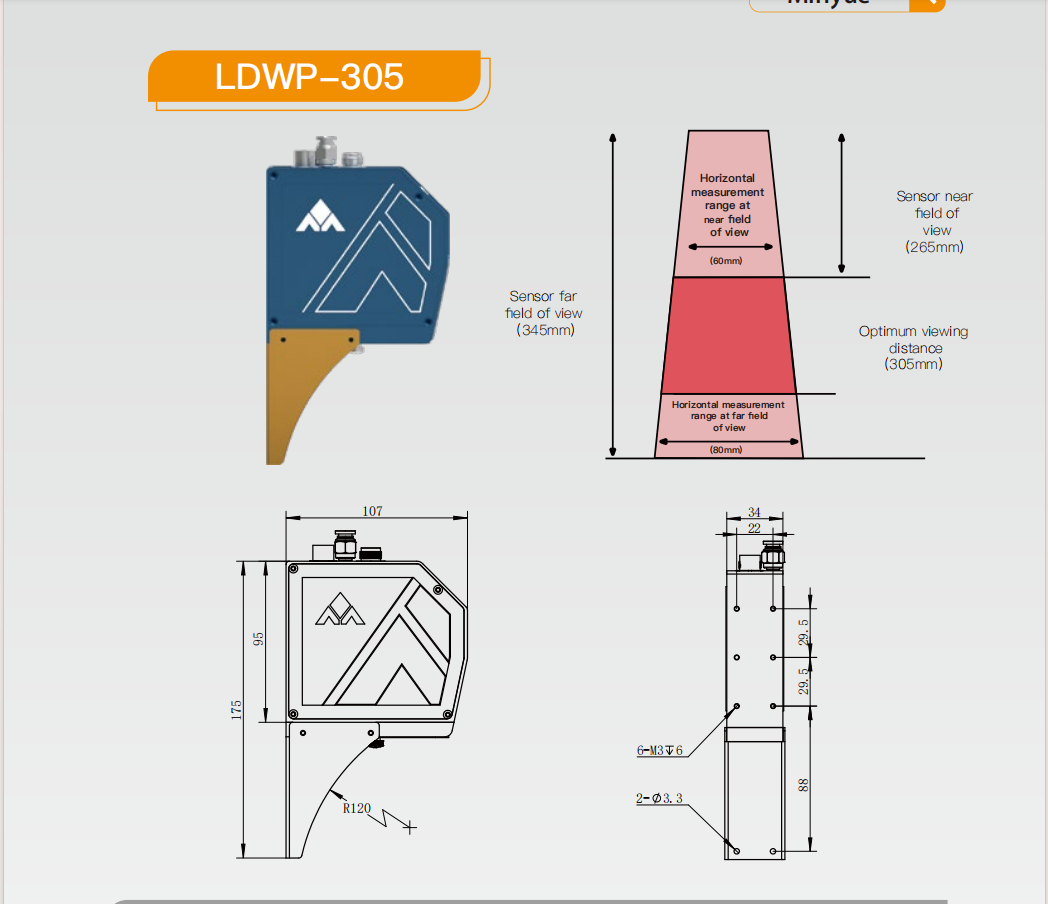
LDWP-305 ლაზრის ეკრანული მონაცემთა გადამტარი სენსორი
01. პოზიციის და გადახრის корректировкой, 02. რეალტაიმური ტრაქტინგი, 03. სკანირება და ავტომატური საწვავი.
- Გენერალური ინფორმაცია
- Იურიდიული პირის მხარდაჭერა რობოტის ბრენდი
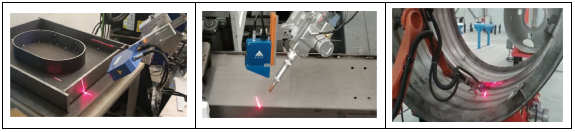
Სენსორი გამოიყენება ლინეარული სტრუქტურული სვეტის ზომვისთვის, რომელიც ასხვავს სწრაფ ხაზოვან სურათის ჩაღებას, გარემოდან შემუშავებას და მექანიკური მოძრაობის გარეშე; მძლავრი ადაპტაბილიტე, საშუალება გაქვს ვარჯიშის პარამეტრების გამოსახმავად; სრულად ჩანაცვლებულია, გარე ინდუსტრიული კონტროლის კომპიუტერებით და ბევრი სხვა მერიტობით, რომელიც გამოიყენება განსხვავებული ტიპის ავტომატურ ვარჯიშში. ნებისმიერი ვარჯიშის პროცესის შემთხვევაში, ჩვენ შეგვიძლია გავაწონოთ მั่ნამდებელი მხარდაჭერა და სტაბილური მუშაობა, რომლებიც უზრუნველყოფს მარტივ შედეგებს განსხვავებულ ვარჯიშის სცენარებში.
Სენსორი შესაბამისია ყველაზე მოთხოვნადობის გამოყენებებისთვის, რადგან არ არის სამყაროს, წყალის და ნელის (IP67) სენსიტიური და არ არის ელექტრომაგნიტური რადიაციის (EMC) წყაროების წინააღმდეგი.
Ძლიერი ფუნქციებით
01. პოზიციისა და გადახრის حيحვევა
Პოზიციისა და გადახრის حيحვევის ფუნქცია გამოიყენება განსხვავებული ნაწილების მარტივ ვარჯიშის სცენარებში, რომლებიც ერთმანეთს ერთი მოდელია, მაგრამ მათ არის განსხვავებული ტოლერანციები. ეს ფუნქცია უზრუნველყოფს, რომ ნაწილების გადართვას არ სჭირდეს ხელით შესატანი ინტერვენცია, და რობოტი განსაკუთრებით განსაზღვრული პოზიციისა და გადახრის სისტემის მიერ მიზეზდება, რათა მიიღოს ზუსტი ვარჯიში.
Два-точечная პოზიციონირება შესაბამისია გამრავლების 2D გადახრისთვის.
Მრავალწერტილოვანი პოზიციონირება, რომელიც შესაბამისია მრავალსეგმენტური 2d გადახვევის კავშირებისთვის
Სეგმენტური პოზიციონირება, რომელიც შესაბამისია მრავალსეგმენტური 3d გადახვევის კავშირებისთვის.
02. რეალური დროში ტრაკინგი
Რეალური დროში ტრაკინგის ფუნქცია გამოიყენება კავშირის სცენარებში, სადაც საჭიროა მაღალი ეფექტი და გარემოში არ არის ინტერფერენცია. სენსორი დაფიქსირებულია კავშირის ჩარბის მიმართულებით, და კავშირის ჩარბი ავტომატურად რეგულირებს კავშირის გზას 3D კოორდინატური მონაცემების მიხედვით.
03. სკანირება და ავტომატური სიმღერა
Სკანირებისა და ავტომატური კავშირის ფუნქცია აძლევს სენსორს საშუალებას ჯერ აგრეთ აგრეთ კავშირების გეომეტრიული ინფორმაციის შეკრება. ეს ფუნქცია შესაბამისია მაღალი რეფლექტირების, მოკლე კავშირის სავარაუდო სავლეთებისა და სარგებლო კავშირის სცენარებისთვის.
Ლაზრის კავშირის ტრაკინგი
Ლაზრის კავშირის ტრაკინგი შეძლებს კავშირის გადახვევების განმარტებას მაღალი, დაბალი და მარცხენა მარჯვენა მიმართულებებში.
Შეძლებს კავშირის განმარტებას პატარა შუანების მქონე კავშირებისთვის.
Ამოახსნის კავშირის ტრაკინგის პრობლემას ნაწილაკების მცირე ლარებისთვის.
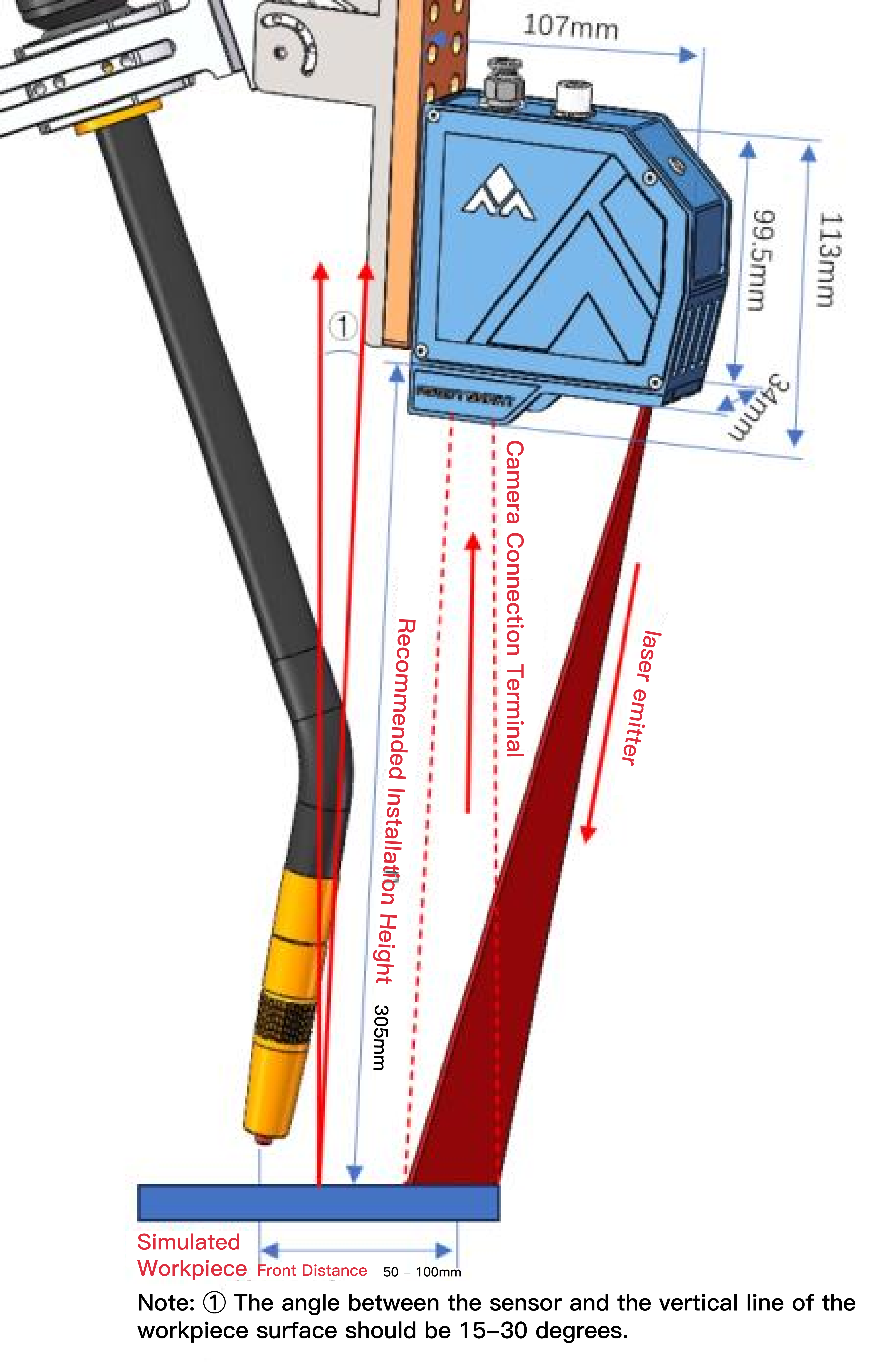
Оптიმალური ჩანათვალის მანძილი არის WaitForSeconds 150mm.
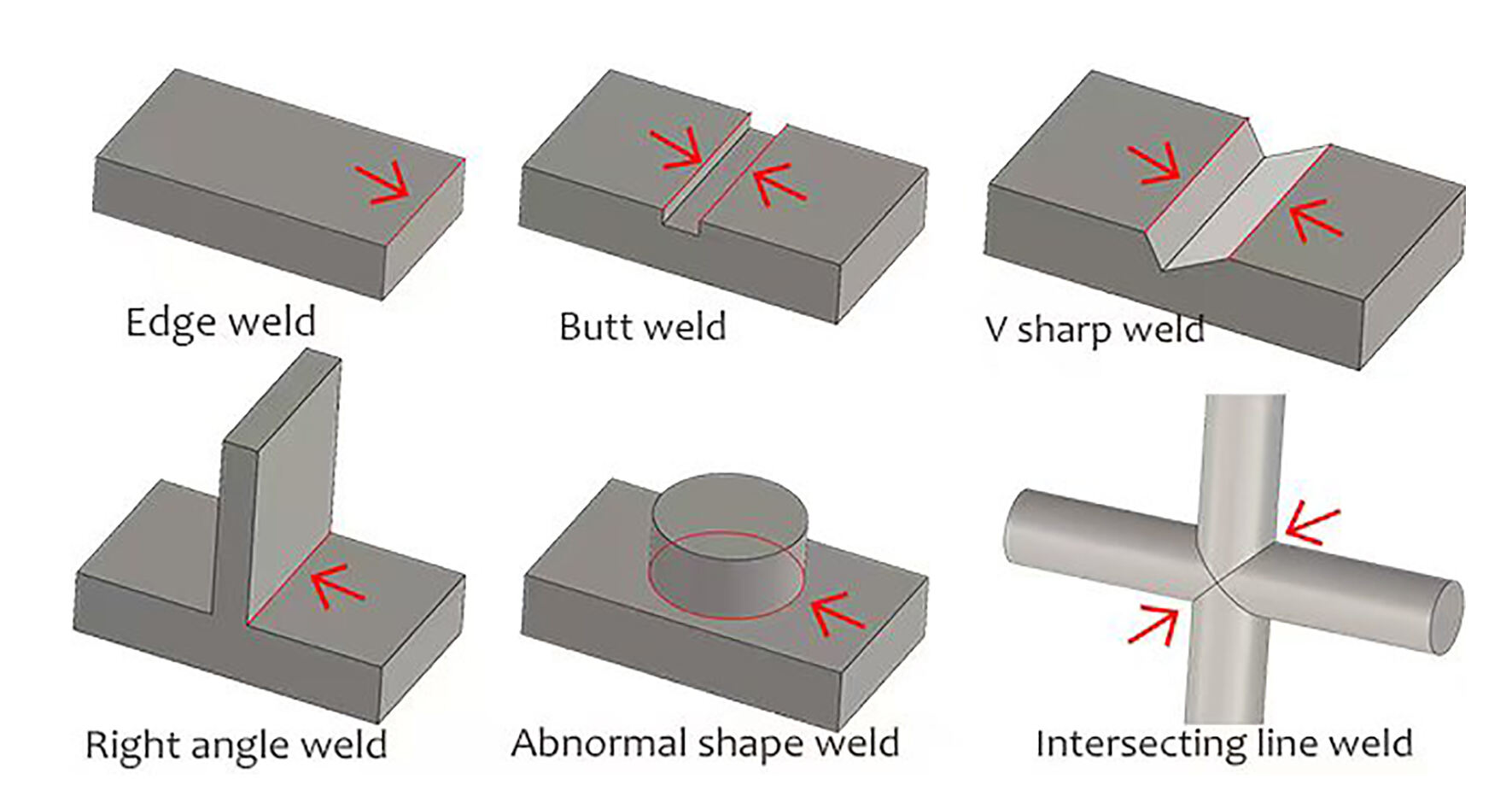
Ქსოვილის ტიპის მხარდაჭერა
V-გრძელი ქსოვილი
Კუთხეული ქსოვილი
Ქსოვილი ჩამორთვით
Კავშირის ქსოვილი
Ღრუბლის ქსოვილები და Atlanta
Გრძელი მანძილი ლოდინის ხედვისთვის, ფართო ხედი, საჭიროა სტალის სტრუქტურებისა და სამანქანო მехანიკის ინდუსტრიისთვის.
Გთხოვთ აირჩიეთ ტიპი განსაზღვრული მოქმედების სფეროს მიხედვით, რათა არ დაიხვალოს ნამუშევარი სენსორს, რობოტის ტვირთი ჩვეულებრივ 20KG-ზე ნაკლები უნდა იყოს.
Კოოპერატიული პარტნიორი

Იურიდიული პირის მხარდაჭერა რობოტის ბრენდი







