Რობოტები, რომლებიც არის ჭეშმარიტი, ყველაcreasing მეტ და მეტ ხანგრძლივობაში ხართ. შეიძლება თქვათ, რომ ისინი შეიძლება იყოს ფაბრიკებში, ჰოსპიტალებში, და ჩვენ და შენ ც ცხოვრების ადგილზე. ეს ავტომატური სველდინგის რობოტი შემუშავებულია განმარტების, სწავლის და მოქმედების ადამიანების მსგავსად, რათა შეძლონ განათავსონ განსხვავებული დავალებები. მაგალითად, ისინი შეგვიძლია გვეხმარონ სამუშაო დავალებებში, განახლონ განათავსების გამო, ან დაგვეხმარონ პროდუქტების დიზაინში. ისინი იყენებენ რამდენიმე საშუალებას, როგორიცაა სენსორები და კამერები, რათა ნავიგაცია და მოქმედება ავტონომურად. ამ ტექნოლოგიით ისინი შეძლებენ განიხილონ გარემო მართლაც იმავე გზით, როგორც ჩვენ როდესაც ჩვენ გამოვიყენებთ ჩვენ გარემო და განაპირობებთ, რა უნდა გავაკეთოთ შემდეგ.
Ჭკვიანი ტექნოლოგია საბავშვოდ შეცვალა ჩვენი ცხოვრების, მუშაობის და სასამართლო გარეშე გადასახარი გზები, განსაკუთრებით რობოტების კონტექსტში. ის გარდაქმნა ჩვენი მუშაობის, სწავლის, დიახ, მაშინ თამაშის გზები. ეს სამრეწველო შედუღების რობოტი შეძლოს ამოცანების გაკეთება, რომლებიც მხოლოდ ადამიანებმა წვდომია, ეს საინტერესოა. ისინი იყენებულია ფაბრიკებში რამდენიმე რამის შესადგენად, რაც აჩქარებს პროცესს და ხდის მას ეფექტურად. საჟამთარებში, ისინი დახმარებით ქრუროსამაღლებში, უზრუნველყოფს ინსტრუმენტების სწორ ადგილზე მდებარეობას და ქრუროს ადგილის მომზადებას, ასევე სხვა ამოცანებს.
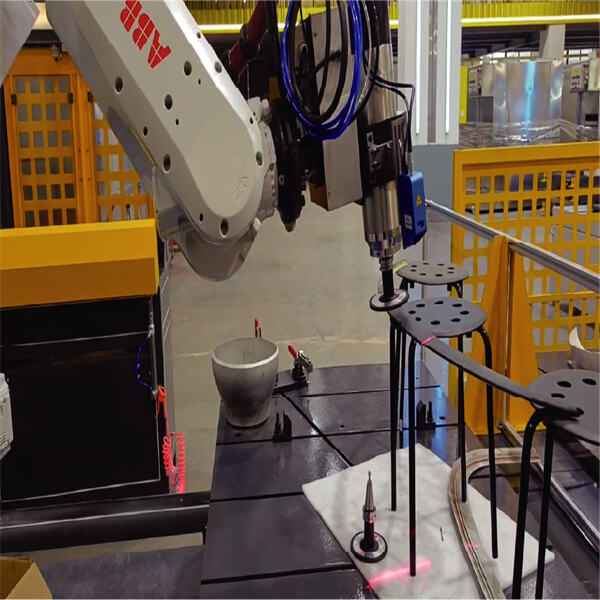
Რობოტები, რომლებსაც გვხვდება განვითარებული წერები, შეცვალეს ბევრ პროფესია რამდენიმე სექტორში. თუმცა, ეს მაशინები ასევე აჩქარებენ პროცესებს, განსაკუთრებით ფაბრიკებზე, სადაც მათი გამოყენება დაგვეხმარება შეცდომების შემცირებაში, რომლებიც ხშირად ხდება ადამიანების მუშაობის დროს. მათ შეუძლია განმეორებითი სამუშაო სწრაფად და ზუსტად შესრულება, რაც დაგვეხმარება პროდუქციის გრაფიკის მართვაში. ჯანდაცვის სფეროში ისინი დაგვეხმარება განავითარებისა და პაციენტების trata დოქტორებს. ისინი შეძლებენ დახმარებას ისეთი საქმეებში, როგორიცაა შენიშვნების ჩაწერა ან პაციენტის ჯანმრთელობის შესახებ ინფორმაციის გამოცემა, რაც თავისუფალებას დაახმარება დოქტორებს მეტ დრო გაატარონ მათ პაციენტებთან. რობოტები გამოიყენება ასევე ზოგიერთ ფერმაზე სადაც მათ შეუძლია საკვების გადეგენა და შეკრება, რაც ხელს უშვებს ფერმერებს დრო და მუშაობას. ეს MINYUE რობოტული ლაზრის საკრური მანქანა ცვლის ჩვენი მეთოდები და გვეხმარება რამდენიმე საქმეში უფრო ეფექტურად.

Ლოგიკურია, რომ ადამიანებსა და რობოტებს შორის თანამშრომლობის პროსპექტები ნამდვილად ახალგაზრდად არის. მეტი MINYUE რობოტი დაგვეხმარება სხვადასხვა სამუშაოებში და სფეროებში, რაც ტექნოლოგიის მაღალი განვითარების შემდეგ ჩანდება. ეს თანამშრომლობა გვეშვებს მეტს გაკეთებას და ინვენტირებას იმ რამ, რაც თავის მხრივ ვერ შეგვიძლია გავაკეთოთ. უკეთესი მუშაობის მაღალი წარმოშობა შესაძლებელია, თუ ადამიანები და რობოტები ერთმანეთს დაგვეხმარებიან. რობოტი, მაგალითად, შეიძლება დაატანოს მძიმე ნატორები, ხოლო ადამიანი კი კონცენტრირდება გარკვეულ გადაწყვეტილებებზე.
Გარკვეული კარგი რეალიები არის ინტელექტუალურ რობოტებში, მაგრამ არ უნდა გავაუგლიოთ მთავარი კითხვები და გაუმჯობესებები, რომლებსაც უნდა განვიხილოთ. მაგალითად, MINYUE რობოტები, რომლებიც შეიძლება ინფორმაცია აგრეთ შეაგროვონ და გამოიყენონ, ახალ პრივატულობის და საუსამართლო პრობლემებს ამოწმებენ. მათ შეიძლება განვითარდეს გამოწვევები იმ შესახებ, როგორ მართალდება მათ პირადი მონაცემები. ასევე, არსებობს რისკი, რომ რობოტები გადააჭრინა ადამიანთან სამუშაოს, და ეს კი უნდა განვახედოთ.
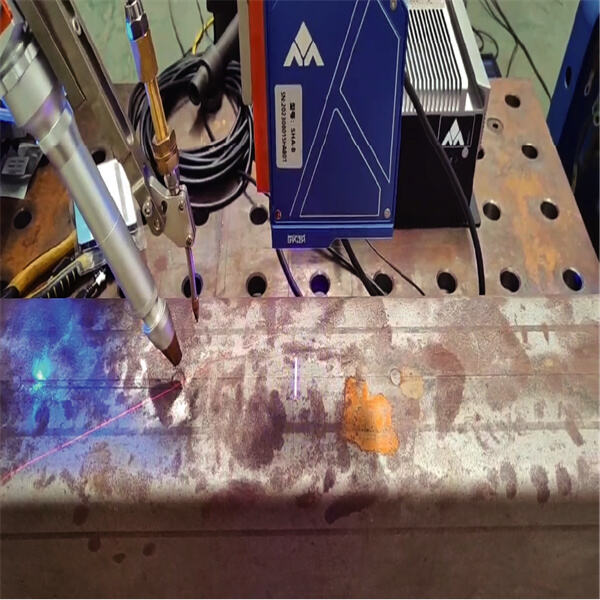
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


