Ეს ნიშნავს, რომ სენსორები ძირითადია ai რობოტი . ისინი როგორც რობოტების თვალები და ухиა. როგორც ჩვენს თვალებს გვაძლევს ხედვაზე შესაძლებლობას, როგორც ჩვენს ухებს გვაძლევს გამოსაყურებლად ხმები, სენსორები რობოტებს აძლევენ შესაძლებლობას გარგენილის ხედვასა და გასაგებად. რობოტები ასევე შეძლებენ თავიანთი გარგენილის შესასწავლად განსხვავებული სენსორების გამოყენებით. ისინი შეძლებენ გამოსაყურებლად მოძრაობას, ხმას, მოსამაგრებელს და ამავე რამდენიმე მანძილის შესაფასებლად. სენსორები ძირითადია, რადგან ისინი აძლევენ რობოტებს უსაფრთხო ნავიგაციას, გარკვეული გადაწყვეტილებების მიღებასა და გარგენილის თავიანთ მოსამაგრებლად.
Რობოტიკაში, MINYUE სენსორები წარმოადგენენ რობოტების მუშაობის ძველ ნაწილს, რომლითაც იყენებენ მისცეს მიღებული დავალებები. სენსორები მისცენ რობოტებს საჭირო ინფორმაციას, რომლის გამოყენებითაც ისინი ზუსტად და ეფექტურად შეძლებენ შესრულებას თავიანთ სამუშაოს. რობოტები არ შეძლებდნენ საკმარისად შენიშნავდნენ ადამიანებს მისცენ ინსტრუქციებს, არ გადახვევდნენ კოლიზიებს და არ შეძლებდნენ მისცენ მიმართულებას გარკვეული მიმართულების შემდეგ, თუ არ იყო სენსორები. სენსორები: თქვენ შეგიძლიათ სანამ განიხილოთ სენსორები რობოტების „გონებად“ როგორც ისინი თამაშობენ ძირითად როლს იმის გასარჩევად, როგორ პერცეპცია მათი გარე გარემო და როგორ რეაგირებენ.
Მოწევას შესაბამისი სენსორები: მოწევას შესაბამისი სენსორები რობოტებს ძალს აძლევენ გამოიყენონ და ინტერაქტირონ ადგილმდებარეობაში მყოფ ადგილებთან. როდესაც რობოტი შეხვევა ადგილს, ის მოითხოვს მოწევას შესაბამის სენსორისგან, რათა იცოდეს რას შეუხედა, რაც შესაძლებლობას აძლევს მისაღებად შესაბამისი პასუხი.
MINYUE ავტონომური რობოტები არის რობოტები, რომლებიც დიდი საშუალებით შეძლებენ მუშაობას ადამიანთან შემთხვევით და დამოუკიდებლად. ამ რობოტების მუშაობა დაყრდნობულია დიდ რაოდენობის სენსორებზე, როგორიცაა ლაზერის სენსორი რომლებიც გამოიყენება მათ გარემოს დაკვირვებისა და ავტონომურად ამოცანების ამოხსნისთვის. მოდით ჯერ განვიხილოთ რამდენიმე ძირითადი კომპონენტი ავტონომური რობოტებისთვის:
Ელ ინტელექტუალურად განათლებულ რობოტებს იზრდეს მათი უნარები და შეძლონ უფრო ეფექტურად ასრულებოდნენ დავალებებს გამოყენებული განსხვავებული სენსორები. მაგალითად, სინათლის სენსორები შეგიძლიათ მათ დაახმარონ სინათლის პოვნას და მისი გასწვრივ მოძრაობა. ეს ნიშნავს, თუ ჩაირთვება სინათლი, რობოტი შეიძლება მიიღებს მისკენ. გამოსასმენი სენსორები: რობოტები შეიძლება უპასუხონ ხმოვან ბრძანებებს. ხმის სენსორი შეიცავს რობოტს, რა არის ადამიანი გასაღებით მის მიერ განაცხადებული.
Არსებობს MINYUE მოწყობილობის სენსორები და ლაზერული სენსორი რომლებიც გაძლევენ რობოტებს უნარებს ინტერაქციაში განსაზღვრული ადგილებით. მაგალითად, თუ რობოტი მოწყობს სახლის სართულს, მოწყობილობის სენსორი ამბობს რობოტს, გაჩერებული იყოს წინააღმდეგ მოძრაობა. გამოსავლეთი სიგნალები მართავს მანქანების მოძრაობას გზაზე. ისინი შეგიძლიათ გაზომონ მანძილი ადგილებთან, რათა რობოტი უფრო უსაფრთხოდ მოძრაოდეს გარშემო და არ შეჯიბროს.

Აღწერილიდან გვხურთ, რომ სენსორები ძირითადი კომპონენტებია რობოტიკის ტექნოლოგიისა. ისინი აძლევენ რობოტებს შესაძლებლობას გარგენილის გარკვევასა და მოსა ><?
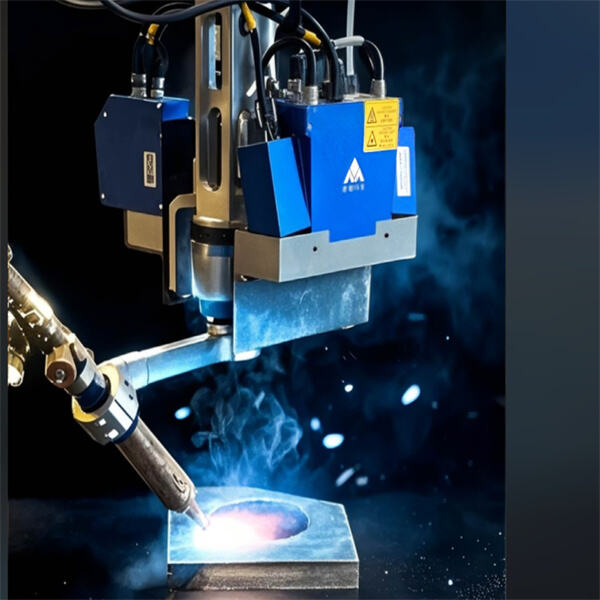
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








