Ռոբոտները համարյալ մեքանիզմներ են, որոնք կարող են կատարել տարբեր խնդիրներ, սencilական խնդիրներից, ինչպիսիք են տանձավազանների սահքումը, մինչև ավելի բարդ աշխատանքներ, ինչպիսիք են միացման գործարաններում մեքանիզմների կառուցումը: Սենսորները են այն, ինչ դարձնում է ռոբոտները միանշան: Գիրանները, սերվոմեքանիզմները և մոտորները դարձնում են ռոբոտները շարժվող և գործող: Դրանք թույլ են տալիս ռոբոտին տեսնել, լսել և զգալ, թե ինչ է տեղի ունենում շուրջումը — այն է անհրաժեշտ դատողական և տեղեկացված päätused այդ տվյալների մասին:
تستخدم الروبوتات أنواعًا متعددة من المستشعرات كوسيلة لفهم بيئتها بشكل أفضل. بعض المستشعرات تكتشف الضوء، الأصوات، أو الحرارة، على سبيل المثال. أما البعض الآخر فيمكنه قياس المسافة بين الأشياء، سرعة حركتها أو حتى إذا كانت تتحرك أم لا. لكل نوع من المستشعرات مهمة محددة خاصة به. هذه التنوعية تمكن MINYUE աԼ ռոբոտ من أداء مجموعة واسعة من المهام بمزيج من العناية والدقة، مما يجعلها مفيدة للغاية في العديد من التطبيقات.

Մեկ այլ տարր ռոբոտների շուրջը տեսնողության մեջ է սենսորների տեխնոլոգիան։ Օրինակ, սենսորները կարող են օգնել ռոբոտին, երբ այն անցնում է դասավանդված սենյակում, հեռացնելով մարդկանց կամ այլ ապարատներից հարվելը՝ որը կարևոր ան전ության դիրք է։ Նրանք կարող են նաև օգնել MINYUE-ին կառավարական ինտելեկտով ռոբոտներ լավագույնը արձանալ և փոխանցել ապարատները, որպեսզի չկորցնի կամ չկորցնի ինչ-որ բան։ Սենսորները տալիս են ռոբոտներին անհրաժեշտ տեղեկատվությունների մասին իրենց միջավայրի մասին՝ թույլ տալով նրանց կատարել մտահանգուն päätused և նախատեսել նոր և փոփոխվող դիրքեր։
Եվ 물론 տարբեր սենսորները ունեն տարբեր ուժեր և ենթարկվում են տարբեր աշխատանքներին։ Օրինակ, ինֆրակարման սենսորները հաճախ են ջերմության դեպքում, այնպես որ դրանք հայտնի են ջերմության հայտնության կամ մืืկ միջավայրում գտնելու համար։ Անտրասկանական սենսորները չափում են հեռավորությունը ձայնալիների օգնությամբ և տալիս են ռոբոտներին տեղեկատվություններ դրանց հարցանքների կամ սեղման դեպքում մեծ տարածքներին մուտքագրելու համար։ MINYUE լազերային դիվանգույթի սենսոր թույլ են տալիս ռոբոտներին կատարել պատկերներ և տեսագրություններ, որպեսզի տարածքի մասին տարատեսական տեղեկատվություն տարածեն: Երբ ռոբոտները միասին օգտագործում են տարբեր տիպի սենսորներ, դրանց տարածքում կլինի շատ լավ գիտելիքներ: Արդյունքում, դրանք կարող են ավելի արագ և հավասարակշիր կատարել աշխատանք:

Նախորդում ռոբոտները ունեին պարզ ֆունկցիաներ իրենց վատ սենսորային տեխնոլոգիաների պատճառով: Դրանք կատարում էին պարզ բաներ, բայց բարդ բաները՝ ոչ մի դեպքում: Սակայն վերջին տարիներում սենսորային տեխնոլոգիաներում են գրավել մեծ դրամական փոփոխություններ: Դրանից հետո, ռոբոտները կարող են կատարել ավելի բարդ աշխատանք, քան նախորդում: Տեխնոլոգիայի առաջարկումներում մենք նաև կտեսնենք սենսորներ՝ որոնք կօգնեն ռոբոտներին անալիտիկ հնարավորություններով:
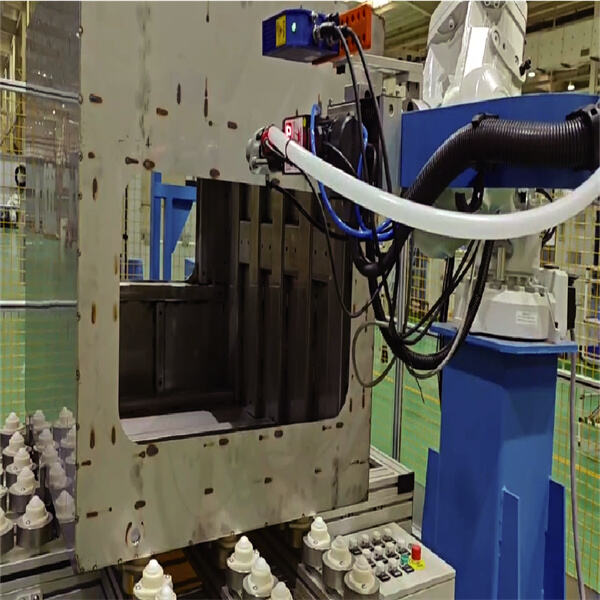
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








