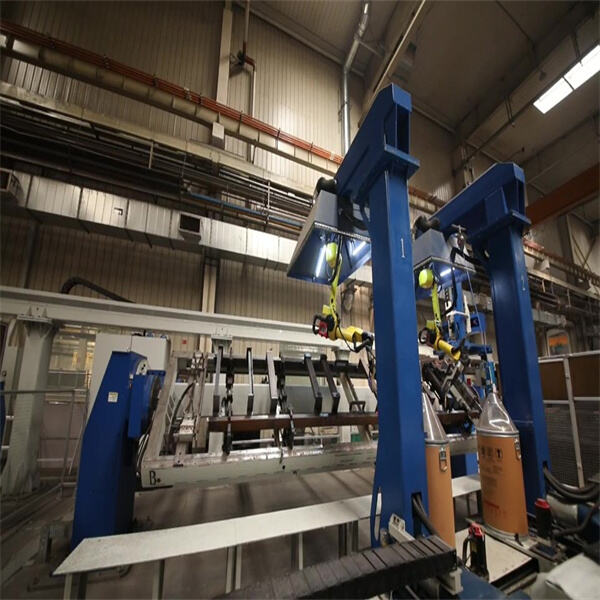
Մենք բոլորս գիտենք, որ ռոբոտների հետ աշխատելը կարող է դժվար լինել, բայց երբ ունեք ճիշտ տեղեկատվություն և մի քանի վարժություն, դա կարող է շատ հեշտ լինել։ MINYUE-ն այստեղ է՝ ուսուցելու համար ձեզ ռոբոտների հետ աշխատելու մասին և ամենալավ եղանակով դա կատարելու համար։ Այս գիրքը կապույտ կարող է ներառել ինչպես աշխատել robot handling system , ինչպես կառավարել դրանց շարժումները, և ինչպես ան전ությամբ և արդյունավետորեն անել դա:
Առաջին հերթին՝ բոլորը տարբեր տեսակների ռոբոտների մասին: Կան երկու հիմնական տեսակի ռոբոտներ, որոնք պետք է գիտեք՝ անշարժ և շարժվող ռոբոտներ: Երբ մենք խոսում ենք անշարժ ռոբոտների մասին, դրանք այն են, որոնք ուրախ չեն շարժվում: Դրանք հաճախ օգտագործվում են գործkedտոններում՝ կոմպոնենտների միացում այլ աշխատանքների համար: Հակառակ դեպքում, շարժվող ռոբոտները ստեղծված են շուրջ նավիգացիայի և տեղափոխության համար: Այս ռոբոտները շարժվող ձեւերի են ռոբոտները, որոնք ընդհանուրապես օգտագործվում են առաքման կամ կարան այլ այլ առաջնահերթ նպատակների համար: Կարևոր է հասկանալ այս տեսակների տարբերությունը, քանի որ դա թույլ է տալիս ձեզ անցկացնել ճիշտ ընտրություն և ընտրել ճիշտ ռոբոտ այն աշխատանքի համար, որը պետք է կատարեք:
Հիմա խոսենք ՄԻՆՅՈՒԵ ռոբոտի կառավարման մասին: Ռոբոտը շարժելու համար օգտագործվող հիմնական ինտերֆեյսը կարող է լինել ջոյստիկ կամ կոճակների շարք, որոնք կարող են օգտագործվել չորս ուղղություններում շարժվելու համար: Կառավարման հետ վարժվելը կարևոր է, որպեսզի ստանաք փորձ ռոբոտի շարժման և պատրաստության մասին: Ռոբոտը կարող է ծրագրավորվել ցուցակային հրամանների գրառմամբ, որոնք կոչվում են կոդ: Այս կոդը տալիս է հրամաններ ռոբոտին նրա շարժման և աշխատանքների կատարման մասին: Ռոբոտների հետ աշխատելու համար դուք պետք է սովորեք ծրագրավորման, որը հիմնական մաթեմատիկական ունակություն է այժմ:
Երկար և բարդ շարժումներ կատարելու համար ռոբոտներին նաև պահանջ կա, և սա կարող է լինել ավելի բարդ։ Քանի որ որոշ դinge-ները բավականին բարդ են, մենք փորձում ենք դրանց վերածնել հասանելի մասերի։ Օրինակ, եթե ուզում եք տեղափոխել ռոբոտ սենյակի մեկ ծայրից մյուսը։ Կարող է լինել անհրաժեշտ առաջնական ուղղություն տալ ռոբոտին, որպեսզի ճիշտ ուղղությամբ լինի։ Դատարկելով մի փոքր առաջ և պտտելով՝ կարող եք գործել այնտեղ, որտեղ պետք է գտնվի։ Սա դարձնում է MINYUE ավտոմատացված նյութերի տեղափոխման ռոբոտներ հեշտ կառավարել ռոբոտը։ Կարող եք օգտագործել սենսորներ, որոնք թույլ են տալիս ռոբոտին հասկանալ իր շրջապատը։ Սենսորները օգնում են ռոբոտին հեռացնել 嶂եցողությունները և ավելի հասանելի նավիգացիա կատարել, ինչը դարձնում է ձեր աշխատանքը հեշտացնում որպես հաստատող։

Ամեն որևէ ժամանակ, որը ծախսվում է ռոբոտի հանձնաժողովի լավ լինելու հակառակ, այն է թողնված ժամանակ: Եվ այն ավելի շատ tren եք անում, այնքան ավելի սեղմ դառնում եք ռոբոտին, այնքան ավելի վստահություն կունենաք դրա կառավարման ժամանակ: Կարող եք նաև սերունդեցնել ինքնարժեքությունները՝ ռոբոտի ծրագրավորման միջոցով: Դա կարող է ավելի փոքր փոփոխություններ անել կոդում, որը գրել եք ռոբոտի կառավարման համար՝ ավելի լավ շարժումներ ստանալու համար շարժման հետևանքով և ավելի արդյունավետ բաներ անելու համար: Սահատական վարժությունների և անհրաժեշտ փոփոխությունների դեպքում ձեր ռոբոտի հանձնաժողովի մանրամասները ռոբոտական արագույթ վարձագրող կավելանան շատ շատ։

Երբ աշխատում եք ռոբոտների հետ, ապա աمانյակը միավոր է գլխավոր առաջնադրություններից։ Vien սահմանված ապահովության կանոնները և գործընթացները հետևեք, որպեսզի դուք և այլքերը ապահովված լինեն։ Երբ աշխատում եք ռոբոտների հետ, լավ է լինել գիտելիք ձեր շրջապատում, քանի որ նրանք անպատասխան շարժվելու կարող են անպատասխան։ Գործընթացների օպտիմալացումի համար համոզվեք, որ ճիշտ ռոբոտը կատարում է պահանջվող աշխատանքը։ Օրինակ, եթե պետք է տարածել անվան առանցքներ, պետք է օգտագործել ռոբոտ, որը նախատեսված է անվան առանցքներ տարածելու և կուտակելու համար։ Ավտոմատացման միջոցները և սենսորները թույլ են տալիս ավելի շատ աշխատել պակաս ժամանակի և էներգիայի միջոցով։ Ավտոմատացումը կարող է կատարել մի քանի աշխատանք ձեզ համար, որպեսզի ավելի շուտ ավարտեք ձեր աշխատանքը և այն հեշտ դարձնեք։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









