 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Ընդհանուր տեղեկություն
-
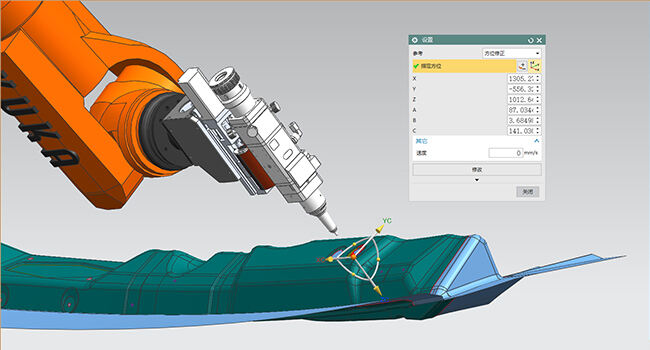
Հմտ դիրքի օպտիմալացում
-
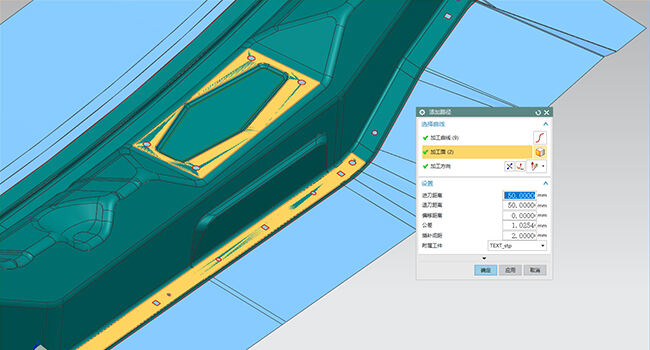
Երկու սեղմումով ստեղծել տրայեկտորիա
-
Տրայեկտորիայի հավասարակշռված անցում -
Բազմաթիվ արտաքին առանցքների կառավարում -
Համագործակցություն բազմաобразության գործընթացներով -
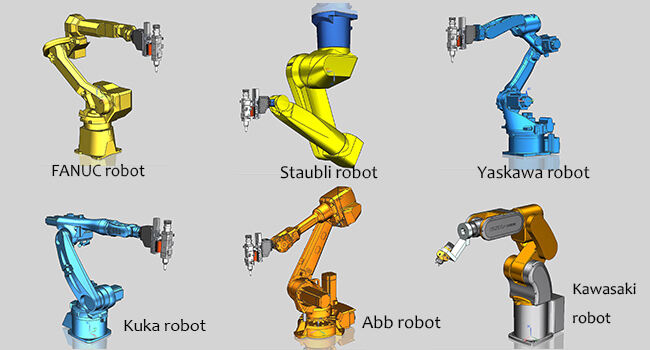
Համագործակցություն բազմատիպի ռոբոտների մարկերով
-
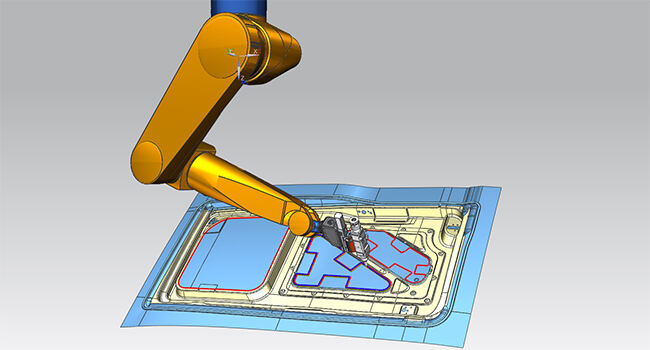
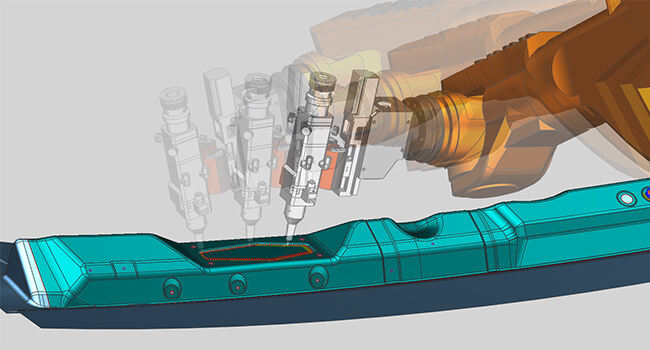
Երկրաչափական լազերային սահք -
Եռաչափ լազերային սահք
Minyue Technology - ռոբոտների ինտելեկտուալ կիրառության մասնագետ, որը կենտրոնացված է լազերային դիտարկության համակարգերի և ստորագրական ծրագրավորման սոֆտվեյրային արտադրանքների վրա
Երբ համարյալ ռոբոտների աշխատանքային օբյեկտները դառնում են ավելի ընդհանուր, ճշգրիտ և բարդ, ինչպես նաև կազմակերպությունների պայմանագրերը՝ արդյունավետության մասին, այն ավելի ու ավելի դժվար է բավարարել արագ, ճշգրիտ և արդյունավետ ռոբոտային մշակման պահանջներին:
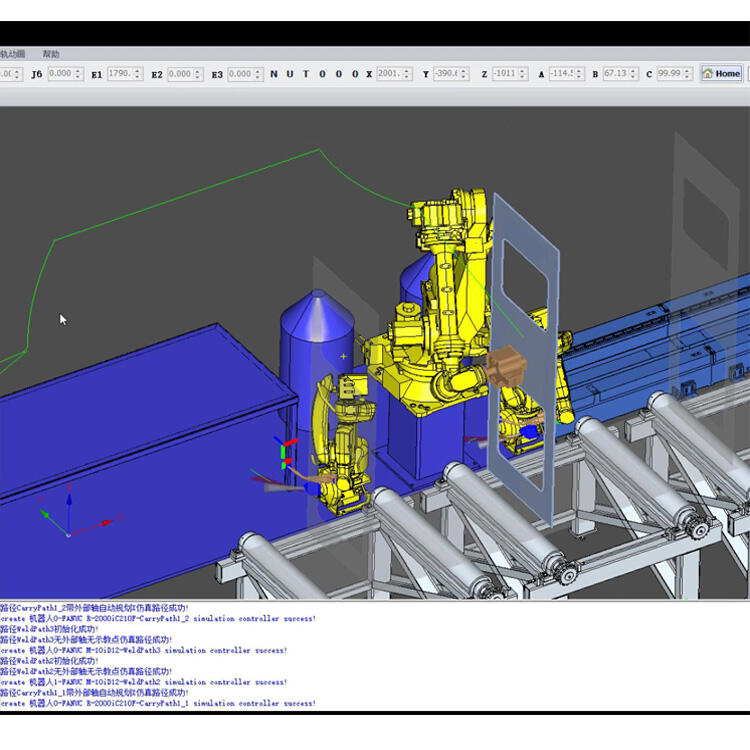
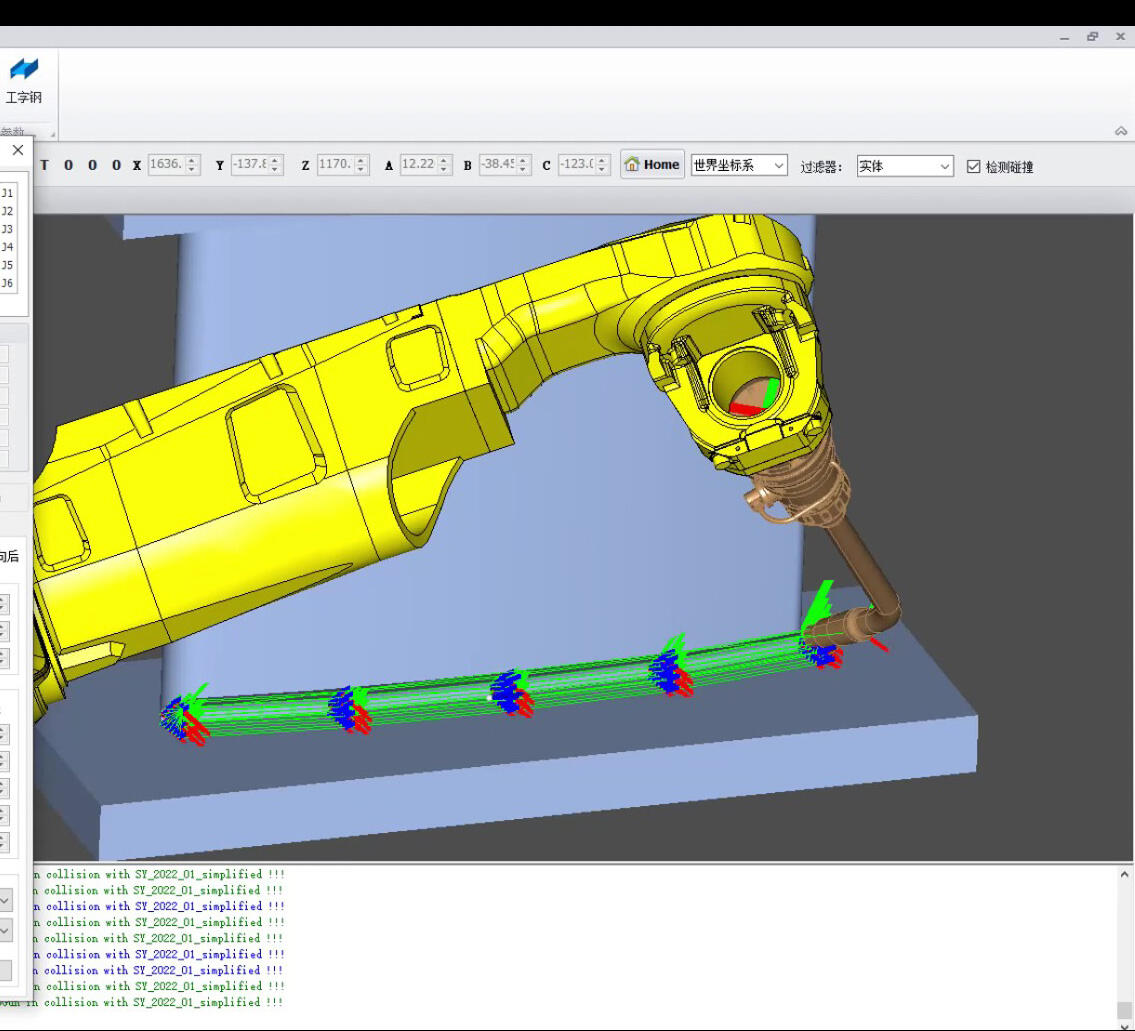
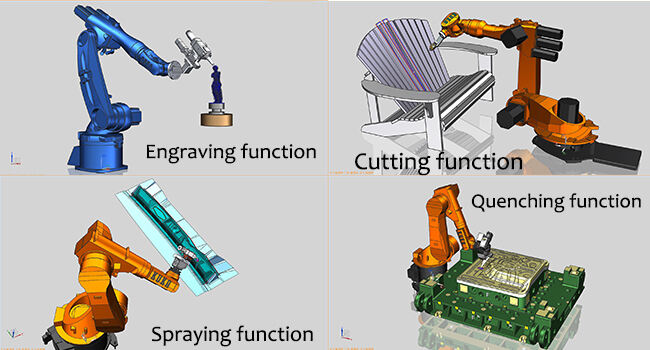
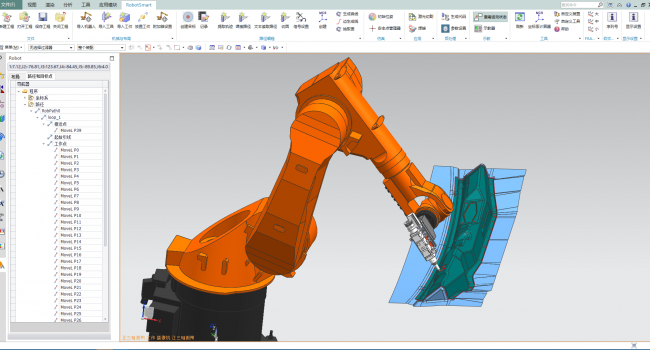
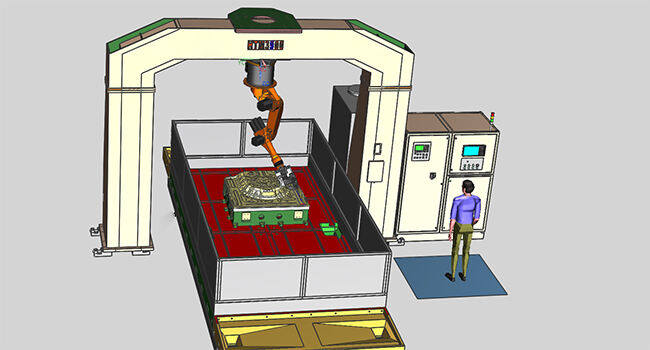
RobotSmart — այն էլ ոֆլայն ծրագրավորման սոֆտվերը, որը անկախ է հրապարակվել Minyue Technology-ի կողմից, որը փոխարինում է ինդուստրիալ ռոբոտների تقليց բարդ ձեռքբերումային ծրագրավորման մեթոդը և իրականացնում է ինդուստրիալ ռոբոտների արագ «պարզ» ծրագրավորումը։ Տրայեկտորիայի օպտիմիզացիայի և սխալության կոմպենսացիայի միջոցով բարձրացվում է ինդուստրիալ ռոբոտների իրական գործադրական արդյունավետությունը և մշակումը։ Ավտոմատացված ինտելեկտուալ ռոբոտի վիճակագրության և ճանապարհի պլանավորման ալգորիթմների օգտագործմամբ կառուցվում է վիրտուալ ստացիան 3D վիրտուալ տարածության մեջ՝ միացնելով վիտանում, լազերային կտրում, շփման և այլ տեխնոլոգիաները՝ ինդուստրիալ ռոբոտների համար արժեքավոր դիզայն և ավտոմատ անկախ ծրագրավորում իրականացնելու համար։ Սոֆտվերը ինտեգրված է ռոբոտի շարժման սիմուլյացիայի, համադրության հայտնաբերում, միակության հանգումից խուսափում և առանցքի սահմանափակումների հայտնաբերման մոդուլներով։ Սիստեման ներառում է ռոբոտի սխալության կոմպենսացիայի մոդուլ, որը կարող է նշանակալիորեն նվազեցնել ռոբոտի աբսոլյուտ դիրքային ճշգրտության և աշխատանքային մոդելի սխալի ազդեցությունը իրական մշակության վրա։ Արդյունքները արդեն լայնորեն օգտագործվում են ինդուստրիալ ռոբոտների կտրում, վիտանում, շփում, գրավիրում և այլ գործունեություններում։
Առաջարկել գործունեություններին ավելի մասնագիտական, ավելի հմտ, ավելի ուժող օֆլայն ծրագրավորման ծրագիր!
1. Առաջարկել համակարգային մակարդակում միացված ինդուստրիալ ռոբոտների ծրագրավորման լուծումներ
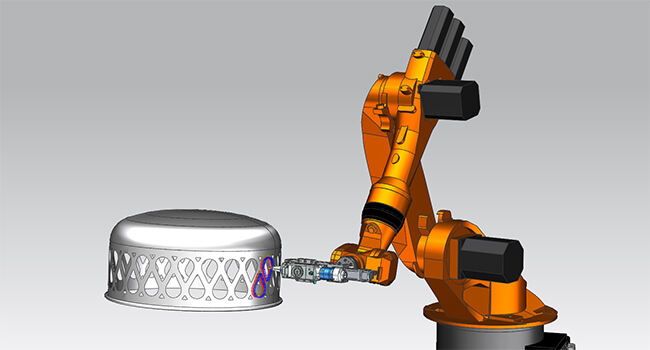
2. Համաձայնացված է լέզվով կտրում, հանգում, քվենչում, շփոթում, մաքում և այլ տեխնոլոգիական կիրառումների համար
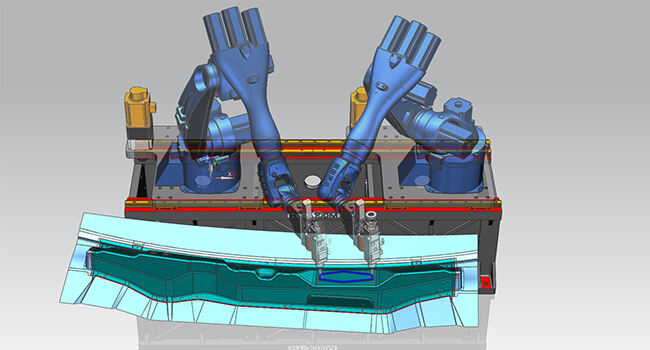
3. Համաձայնացված է բազմաթիվ ռոբոտների գործընթացի սիմուլյացիայի, համադրության անվտանգության ստորագրման, տարբերակների դիզայնի և պլանավորման համար
4. Համաձայնացված է KUKA, Yaskawa, Fanuc, ABB, Staubli, Kawasaki և այլ ինդուստրիալ ռոբոտների համար.
Հեշտ գործառում և հմտ կիրառություն, որը չի պահանջում կոդի ծրագրավորման: Մոդուլային գործառում և արագ իմացություն
Գործարկման դեպքեր
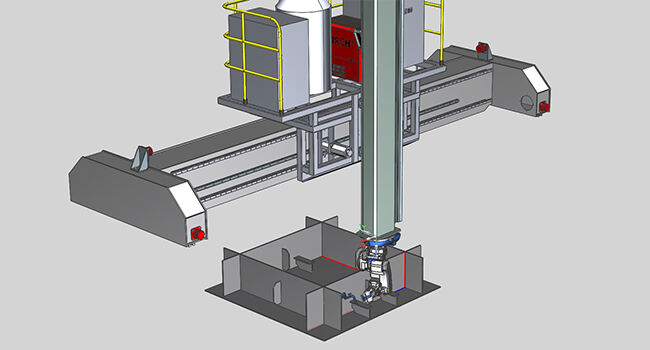
9-ակսիսային համալիրության 悍捍 աշխատավարձ
Կուենցիական աշխատավարձ






