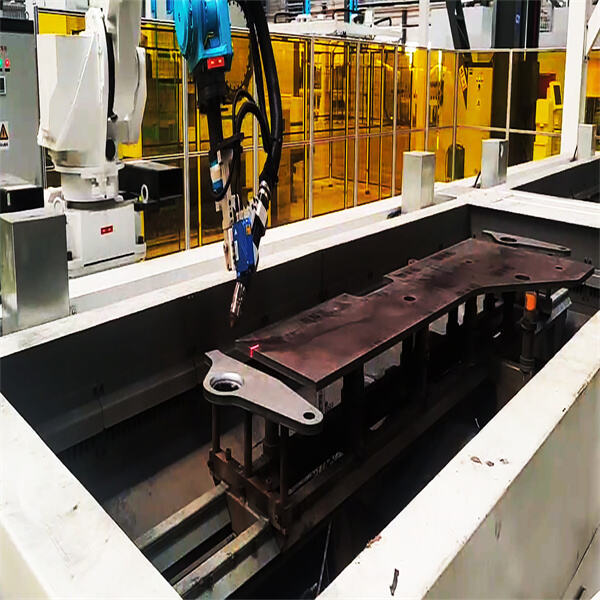
Նկարագրեք մի աշխարհ, որտեղ ռոբոտները անցնում են բոլոր սահքերը մեր փոխարեն: Այնուհետև, գuess what? Այդ աշխարհ այսօր այստեղ է! Կոչվում է ռոբոտական սահք (կամ robo cutting որոշ շրջանակներում), և այն փոխարինում է այնպիսի նյութերի սահքի ձեռնարկությունը: Այս աշխատանքը այժմ կարող է կատարվել մաքնինների կողմից, իսկ ոչ մարդու կողմից, որը կատարում է բոլոր սահքերը: Այդ մաքնինները սահքում են բանականությունները ավելի ճշգրիտ և ճշգրիտ ձևով, քան մենք մարդիկ: Սա է տեխնոլոգիական սահքի կարևոր աստիճան է, և այն հետազոտում է արդյունաբերության մեթոդները արդյունավետությամբ արդյունավետությամբ արդյունավետությամբ
Հին մեթոդը՝ ամենինչ սահքելու ձեռնարկությունը արդեն անցել է: Այլ դար է սկսել, որտեղ մաքնինները կատարում են այդ աշխատանքը, որը այժմ կարող է արտադրել իրականում հատարկ արդյունքներ: Ռոբոտական սահքը մեկ է ամենամեծ փոփոխություններից արդյունավետության մեջ: «Սահքը կարող է արվել արագ և լավ շնորհիվ այս հատուկ տեխնոլոգիային»: Սա խորհուրդ է արդյունավետության մասնակիցներին շատ ժամանակ և թույլ է տրամադրությանը աշխատել ավելի հարմար ձևով՝ միաժամանակ սահքելով մի քանի հատ:
MINYUE ռոբոտական կետային համեմատում , արդյունավետությամբ կարող են ստեղծել ավելի շատ ապրանքներ, չունեցող հատուկ ավարտները ձեռնարկությամբ համապատասխան հատումների հետ: Համարյա պահելու ապրանքների հարցերի մարդկանց պահանջներին հանգում է ավելի լավ սպասարկում և ավելի շատ բիզնեսի շարժումը: Արդյունավետությամբ կարող են օգտագործել ռոբոտներ ստեղծելու համար սխալների փոքրացումը՝ որոնք կարող են տեղի ունենալ ձեռնարկությամբ մարդկանց մասնակցությամբ։ Արդյոք՝ ավելի ճշգրիտ ապրանքներ որոնք բավարարում են հաճախորդների պահանջներին
Հատումը Robo-ի միջոցով գեղարվեստ է և նաև խնայում է դրամների և ժամանակի։ Ռոբոտները, որոնք կատարում են հատումները, կարող են գործանել շատ արագ մարդկանց համար։ Սա հաղթողություն է արդյունավետության համար, քանի որ նրանք կարող են ստեղծել շատ ավելի շատ օբյեկտներ արագ։ Քանի որ ռոբոտները շատ ճշգրիտ են, հատումները իրականում բարձր որակի են։ Հատումը բոլոր մասերը նույն ձևով և չափով կարևոր է՝ համոզվելու համար, որ դրանք բոլորը ճիշտ համապատասխանում են վերջնական ապրանքի մասին։
Այն նաև օգտագործվում է ամբողջ արտադրանքի պրոցեսը արագացնելու և սիմպլիֆիկացնելու համար: Այն նաև խնայում է գործընկերությունների դրամները, քանի որ դրանք կարող են ավելի շատ արտադրել, չպետք է նոր աշխատակիցներ նվիրելու: Ռոբոտային սահքագրումը օգնում է ընկերություններին կենտրոնացնել որպես որոշակի արտադրանքներ ստեղծելու համար, որոնք սպասարկողները սիրեն և կարող են գնել հասարակ գնահատականներով:
Եթե դուք դեռ մնացել եք հին սահքագրման եղանակներին ձեր ցիգարները սահքելու համար, եթե ունեք գործընկերություն, ապա դուք իրականում բաց եք թողել շատ բաներ։ Սահքագրման ժամանակ ժամանակ խնայեք, արժեքներ նվազեցրեք և որոշակիություն բարձրացրեք Ռոբոտների օգտագործմամբ MINYUE սահքագիր, այդ գերազանց սահքագրիչ մաքնինները կարող են դարձնել ձեր գործընկերությունը ավելի համատեղելի՝ MINYUE-ի միջոցով: ռոբոտային համագործակցության ցել կարող են արագ և ճշգրիտ սահքագրում ապահովելու, ինչը ապահովում է լավագույն հնարավոր արդյունքները:

'utilisation MINYUE ավտոմատ վարդակցման ռոբոտ կարող է համեմատյալորեն կարևոր լինել ձեր գործընկերության համար: Այն չի միայն օգնում ձեզ ժամանակ և դրամ խնայել, այլ նաև օգնում է լավ սպասարկել ձեր հաճախորդներին: Օգտագործելով վերջին սահքագրման տեխնոլոգիաները՝ համապատասխանելու հաճախորդների ցանկանություններին և բավարարելու ձեր պահանջներին միշտ:
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
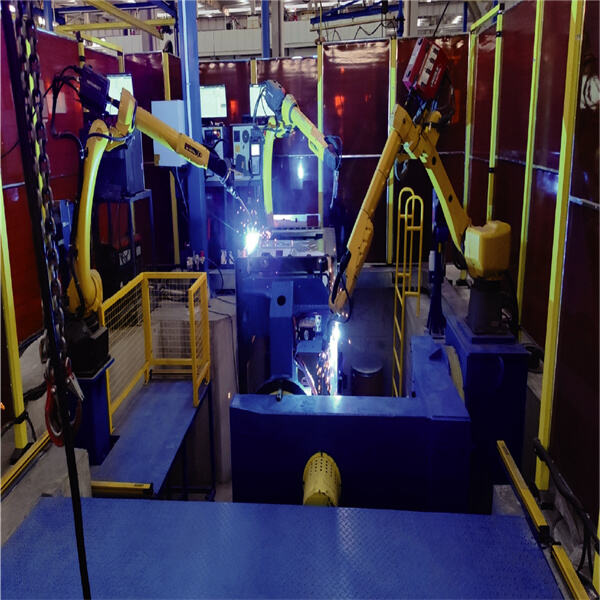
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









