Ռոբոտական համերգի սե맑ը բաղկացած է մի քանի կոմպոնենտներից, որոնք փոխազդում են միմյանց հետ՝ համերգի գործընթացը կատարելու համար: Առաջին մասը դա ռոբոտն է: Ռոբոտը մեխանիկական ձեռք է, որը կատարում է բոլոր համերգները: Դա միացված է կոմպյուտերի հետ, որը տրամադրում է նրան, որտեղ գնալ և թե ինչպես շարժվել: Ռոբոտի ձեռքի վերջում գտնվում է համերգի գործիք, որը թույլ է տալիս նրան միացնել մետաղային մասնավորությունները:
Կազմությունները օգտագործում են ռոբոտական հաղորդագրիչ սելներ, որպեսզի արագացնեն և ավելի արդյունավետ դարձնեն գործ UsersController-ները։ Նրանց մեկ լավ կողմն է, որ դրանք կարող են աշխատել անընդհատ ժամանակաշրջանում։ Սա նշանակում է, որ դրանք կարող են ստեղծել արտադրանքներ արագ անձներից։ Այս գործարանում կա մի քանի ռոբոտ, որոնք կարող են աշխատել անընդհատ, իսկ մարդիկ պետք է հանգստ ունեն կամ վարձանցեն որոշ ժամանակ, ինչը անհրաժեշտ է արտադրանքի ժամանակ։

Դերում ճշգրտության հարցում, ռոբոտական հաղորդագրիչ սելները նաև ավելի վստահելի են։ Դրանք չեն փորձում հանգստ ստանալ, ինչպես մարդիկ, այնպես որ կարող են աշխատել երկար ժամանակաշրջաններում սխալներ չկատարելու դեպքում։ Այդ այնքան համապատասխանություն է։
Ռոբոտական հաղորդագրիչ սելները՝ ավելացնելով գործարանի գործառույթները, նաև խումբեցնում են արդյոք։ Դրանք օգնում են նվազեցնել աշխատավարձի արժեքները, քանի որ կարող են աշխատել անհրաժեշտ չունենալու մարդկանց։ Արդյոք այդպիսի գործունեությունների համար, ինչպիսիք են արտադրությունը, աշխատավարձի արժեքները։
Մինյուե-ում կա շատ տարբեր տեսակի ռոբոտական հաղորդագրիչ սելներ, որոնք կարող եք ընտրել։ Դրանք գոյություն ունեն տարբեր չափումներով, փոքր մաքնիններից, որոնք կարող են աշխատել փոքր պրոեկտների վրա, մինչև մեծ մաքնիններ, որոնք պատասխանատու են մեծ աշխատանքների համար։
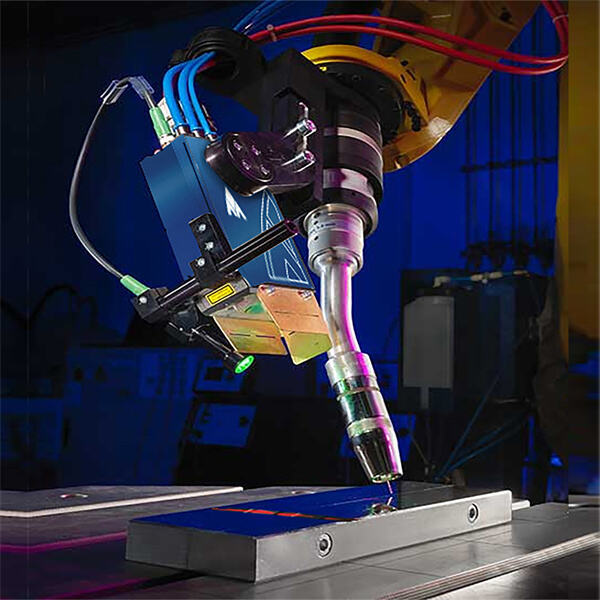
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
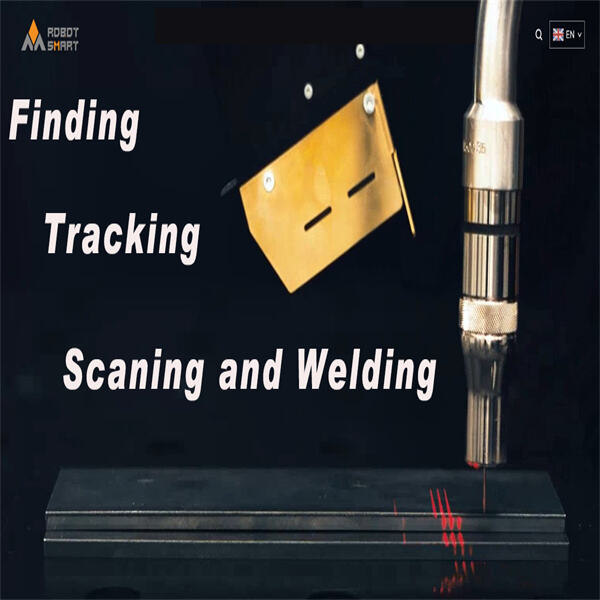
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK
