 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



Կարևոր ծրագիրը չունեցող միգ վիճահարի բանավետ համակարգ, Վիճահարը Ավելի Հեշտ է։
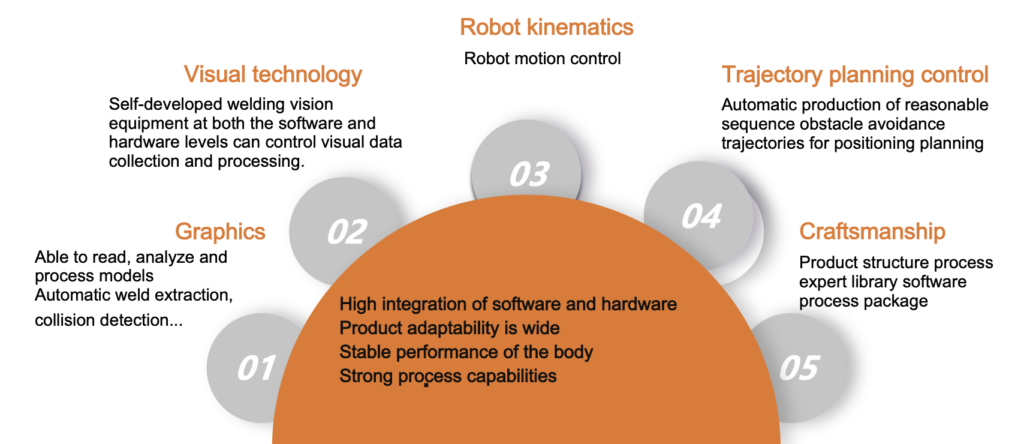
Մինյուե Տեխնոլոգիան է դրականացրել առաջնորդվող տեխնոլոգիաներ, ինչպիսիք են լազերային համարձակ հետևության համակարգը, բանավեճային ծրագրավորման համակարգը, 3D տեսական սկանավորման համակարգը և ռոբոտի ինտելեկտուալ 悍 接 工 艺 库-ն: Հակառակ մոդելավորման և 3D երկրաչափական երկու ռեժիմներով տարբեր սցենարների համար
- Ընդհանուր տեղեկություն
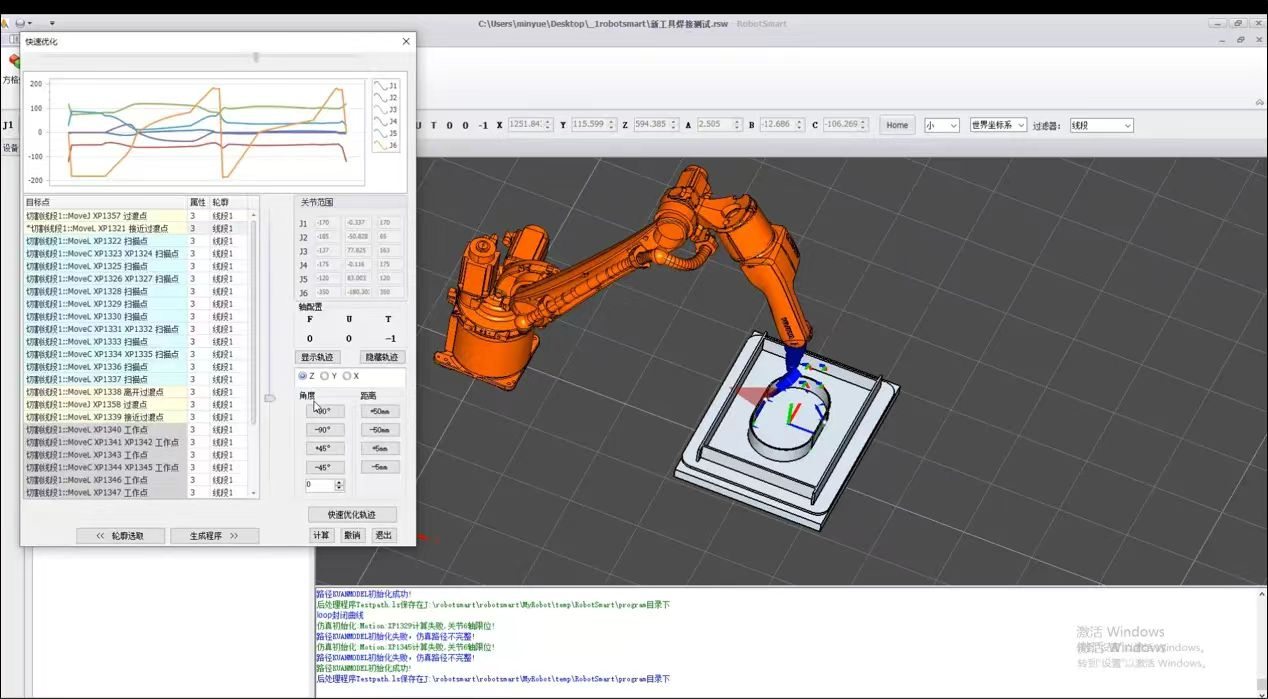
- Ինտելիգենտ օֆլայն ծրագրավորման և սիմուլյացիայի համակարգ
Ռոբոտական 悍 接ը դարձել է անհրաժեշտ գործիք տարբեր մարդատար արդյունաբերություններում: Այնուամենայնիվ, ճիշտ ծրագրավորումը խաղացնում է կենտրոնական դեր հաջող արդյունավետության համար: Եկեք ’տեսնենք մի քանի կարևոր դիտարկումներ ռոբոտական 悍 接ը ավելի հեշտ ծրագրավորելու համար:
Դատարկ Robot և Software-ը ընտրել: Առաջին քայլում, դատարկ ծրագրավորման առաջ պետք է ընտրել ճիշտ ռոբոտը և ծրագրավորման սոֆտվերը՝ ձեր հաղորդման համար։ Ենթադրեք, որ ընտրված ռոբոտը բավարարում է ձեր հաղորդման նախնական պահանջներին։ ’s անհրաժեշտ է ընտրել ճիշտ ռոբոտ և ծրագրավորման սոֆտվեր՝ ձեր հաղորդման համար։ Ենթադրեք, որ ընտրված ռոբոտը բավարարում է ձեր հաղորդման նախնական պահանջներին։
Minyue Technology-ը լավացրել է նախնական տեխնոլոգիաներ, ինչպիսիք են՝ լազերային հաղորդման հետևանումից համակարգը, խելացի օֆլայն ծրագրավորման համակարգը, 3D տեսավորության սկանավորման համակարգը և ռոբոտի ինտելեկտուալ հաղորդման գրադարանը ։ Տարբեր սցենարների համար՝ հակադարձ մոդելավորման և 3D երկրաչափական երկու ռեժիմների ներմուծմամբ։
Օֆլայն Ծրագրավորում (OLP): Կարող եք դիտարկել Օֆլայն Ծրագրավորման (OLP) օգտագործումը՝ բարդ ժամանակակից հաղորդման պրոեկտների համար։ OLP-ն թույլ է տալիս ծրագրավորել և սիմուլյացիա անել ձեր ռոբոտի ’շարժումները և հաղորդման առաջանդրությունները վիրտուալ միջավայրում, նվազեցնելով սխալների ռիսկը իրական հաղորդման գործողությունների ժամանակ։
Համակցվող ռոբոտներ՝ համակարգչային լարանքի դասավորության (OLP) ավելացմամբ, կարող են պարզեցնել լարանքը վերջնական օգտագործողներին։ Այս ռոբոտները կարող են աշխատել մարդկանց օպերատորների կողքում, առաջարկելով ավելի շարժանակ և հեշտ օգտագործում։
Վերադարձ և սիներգիական ֆունկցիաներ՝ Նորարար լարանքի հարցազրույցները տալիս են արժեքով վերադարձ լարանքի գործընթացի վերաբերյալ։ Դրանք ներառում են “սիներգիական ” ֆունկցիաներ, որոնք համոզեցնում են կայուն լարանքի ուժեղությունը։ Այս վերադարձ մեխանիզմը օգնում է պահպանել հաստատուն և բարձրորդին լարանքներ, նվազեցնելով անընդհատ կարգավորումների պահանջը։
Կորեկտ կալիբրացիա՝ Լարանքի դիրքի ամենաբարձր ճշգրտության հասնելը կարևոր է։ Լարանքի սելի կորեկտ կալիբրացիա և մեքենայական տեսանյութի համակարգերի օգտագործումը կարող է համոզեցնել, որ ձեր ռոբոտն աշխատում է առանձին ճշգրտությամբ։

Ես դիրք ունե՞ք բարդ ռոբոտային ծրագրավորման հետ մակերեսի վերջնական մասնավորության համար։
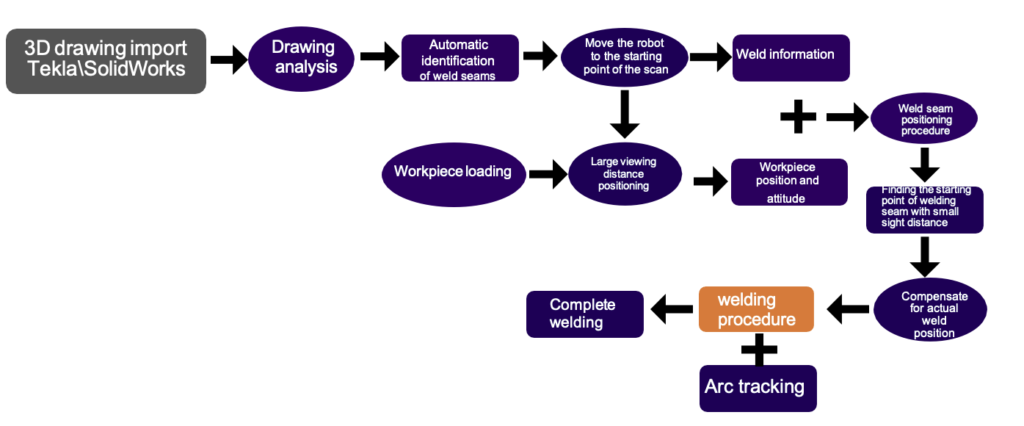
Մեր վերջին դեմոն ցույց է տալիս, թե ինչպես մեր ծրագրավորման-առանց և այցելական տեսանյութով ռոբոտային լուծումը պարզեցնում է ծրագրավորման առանց լարանքը և սուրացնելու կտրումը ճշգրտությամբ և համասեռությամբ։ Según ավանդական 3D տեսական տեխնոլոգիաների և ավտոմատացված գործիքային ճանապարհի գեներացման ինտեգրացիայով, մեր համակարգը հանդիսանում է դադարությունների հեռացման և ռոբոտների ծրագրավորման բարդությունների հեռացման համար։
Կարևոր բարդուր:
1. Ավտոմատացված գործիքային ճանապարհի գեներացումը հարմարացնում է բարդ աշխատանքային հատվածների համար ռոբոտի ծրագրավորման արագությունը և կոդի անհրաժեշտությունը։
2. Մեկ արտագրում է հաղորդագրությունները և e հեռացվում են մակերևույթի վերջնական պարամետրերը՝ ներառյալ EOAT անկյունը, արագությունը և քայլի հեռավորությունը։ Բազային գրադարան հաղորդագրության տարբեր սենարիոների համար։
3. Լուծում են միակ սեղմումով սինգուլյարությունների, հասանելիության և հարթության սահմանափակումները, համարեցված է նաև EOAT անկյան պահպանումը սահմանափակ տիրույթում։
4. Կոորդինացում է բազմառական առանցքների շարժումները՝ համահարակից շարժման համար և համոզված ճշգրտություն հաստատուն գործիքի արագությամբ։
5. Սմարթ Տեսականությունը հայտնաբերում է մակերևույթի անոմալիաները և գեներացնում է օպտիմալ ռոբոտային գործիքային ճանապարհեր նպատակահարյուր բաղադրության համար՝ անընդհատ ստորագրությամբ համապատասխանող որոշակիության համար։
Ոչ բարդ կոդավորում։ Ոչ արտասահման հանգումներ։ Միայն արագություն, ճշգրտություն և արդյունավետություն արտադրության մեջ։
Համագործակցող գործընկեր

Համաձայն ռոբոտի մարկա






