 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



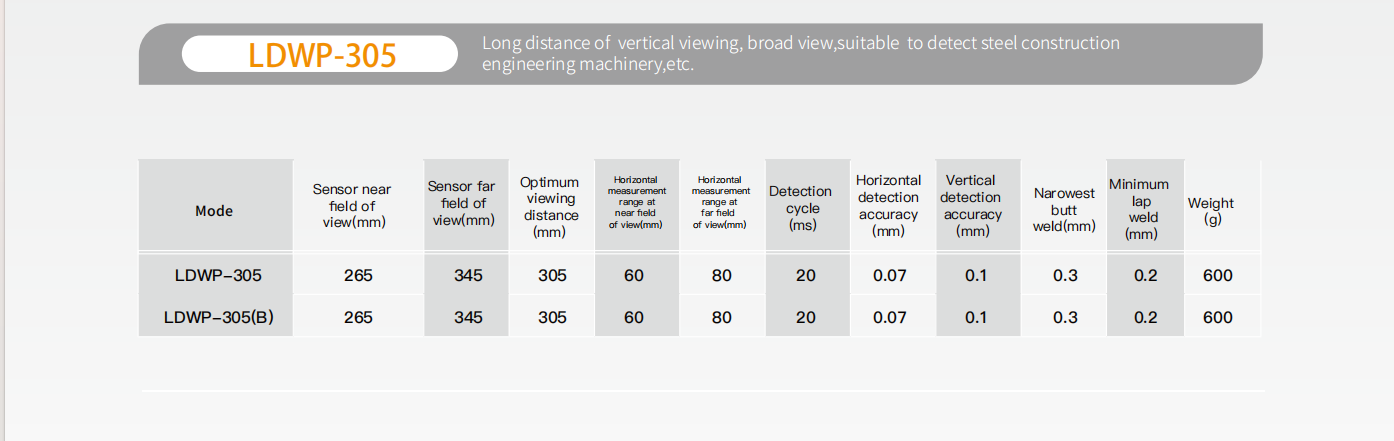
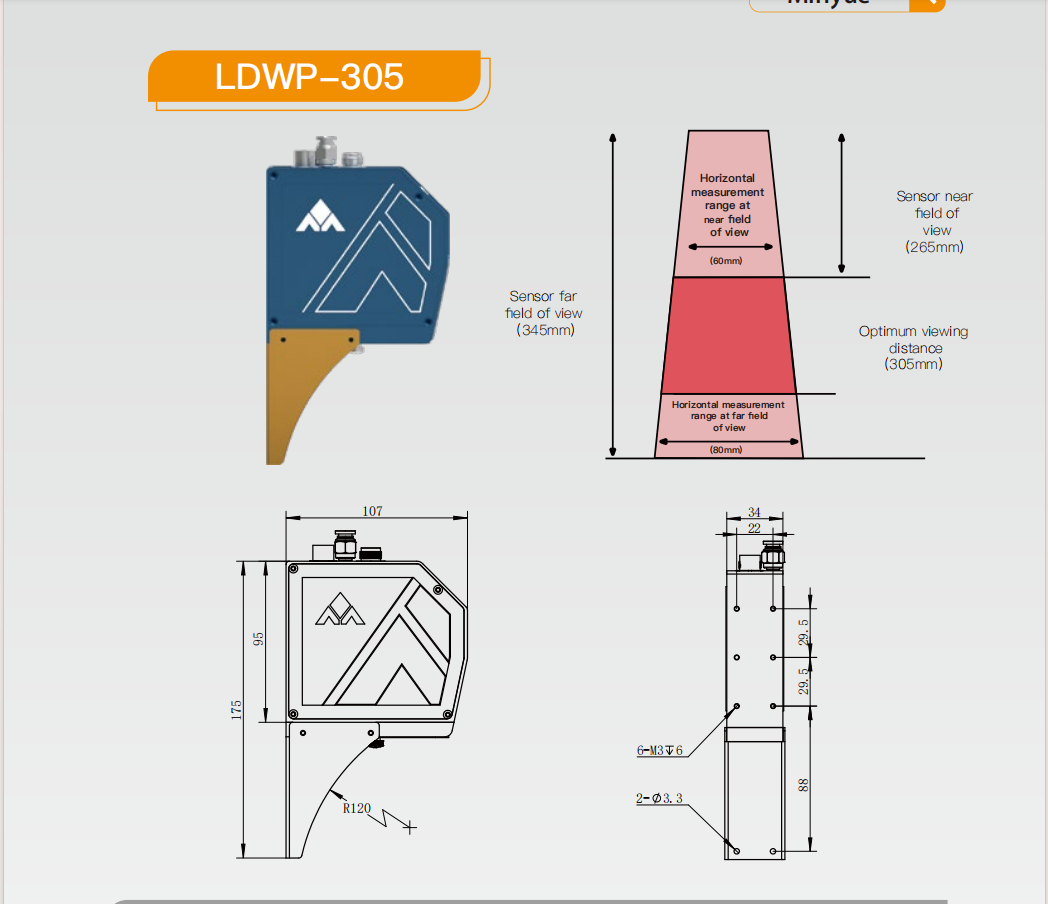
LDWP-305 լազերային միջոցառում հետագծի սենսոր
Դա 01. դիրքի և շեղումի حيحում, 02. Իրական ժամանակի հետևանք, 03. Սկանավորում և Ավտոմատ միացումի ֆունկցիան է:
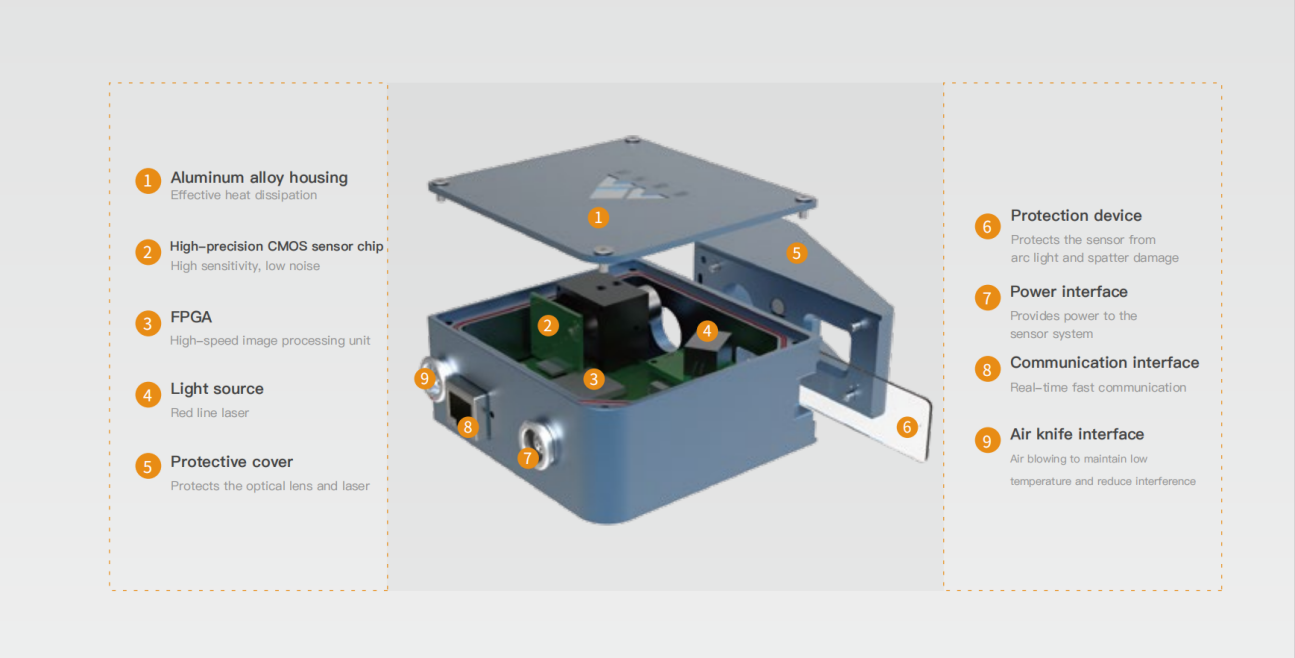
- Ընդհանուր տեղեկություն
- Համաձայն ռոբոտի մարկա
Սենսորը օգտագործում է գծային կառուցվածքով լույսի չափում, որը ունի արագ գծային պատկերացում, չունի կոնտակտ և մեխանիկական շարժումներ; Հզուկ հաստատություն, կարող է արտադրել 悍կան պարամետրեր; Լիցքորեն ներդրված, համակարգացված ինդուստրիալ կոնտրոլային կոմպյուտերների հետ և այլ առավելությունների հետ, այն լայնորեն օգտագործվում է տարբեր տիպերի ավտոմատացված 悍կամանի մեջ: Անկախ 悍կամանի գործառույթից, մենք կարող ենք ապահովել հավիական համագործակցություն և կայուն արդյունքներ տարբեր 悍կամանի սենաrioներում:
Սենսորը համապատասխանում է ամենահարցավոր կիրառություններին, քանի որ այն անզգայաց է անտառային լուսին, ջուրի և աבקի (IP67) և անզգայաց է էլեկտրոմագնիսական ճառագայթման (EMC) դեպքում:
Powerful Function
01. դիրքի և սխալի حيح정:
Դիրքի և սխալի حيح정ի ֆունկցիան օգտագործվում է տարբեր աշխարհամարների համար նախատեսված առաձգական 悍կամանի սենաrioներում, որոնց նույն մոդելն է, բայց տարբեր կիրառություններով: Այս ֆունկցիան համոզված է, որ աշխարհամարների փոխարինման ժամանակ չի պահանջվում ձեռնարկային միջանկյալ, և ռոբոտը հաստատուն է հասնում ճշգրիտ 悍կամանին դիրքի և սխալի حيح정ի համակարգի միջոցով:
Երկու կետերի դիրքը համապատասխանում է ուղիղ գիծ 2D տեղաշարժում 悍կամանի համար:
Բազմակետային դիրքավորում Կիրառելի է բազմահատված 2D տեղաշարժով հաղորդագրությունների համար
Հատվածային դիրքավորում Կիրառելի է բազմահատված 3D տեղաշարժով հաղորդագրությունների համար.
02 Իրական ժամանակի հետևություն
Իրական ժամանակի հետևության ֆունկցիան օգտագործվում է այն հաղորդագրության սենաrios-ներում, որոնք պահանջում են բարձր արդյունավետություն և տարածական հատուկ խափանում չունեն: Սենսորը անշարժ է հաղորդագրության բրիզովին նسبական, և հաղորդագրության բրիզը ավտոմատ կարելի է կարգավորել հաղորդագրության ճանապարհը՝ 3D կոորդինատային տվյալների համաձայն:
03. Սկանավորում և ավտոմատ 悍ման։
Սկանավորման և ավտոմատ հաղորդագրության ֆունկցիան թույլ է տալիս սենսորին առաջին հատուկ ժամանակ հաղորդագրության երկրաչափական տեղեկատվություն հավաքել: Այս ֆունկցիան կիրառելի է բարձր համարձակությամբ, 狹窄 հաղորդագրության տարածքներում և բարդ հաղորդագրության սենաrios-ներում:
Լազերային հաղորդագրության հետևություն
Լազերային հաղորդագրության հետևությունը կարող է ].'նել բարձր, ցածր և ձախ աջ հաղորդագրության շեղումները:
Կարող է ].'նել փոքր տարածքով հաղորդագրությունները:
Լուծում է աստիճանային հաղորդագրության հետևության խնդիրը 溥板 հաղորդագրության համար:
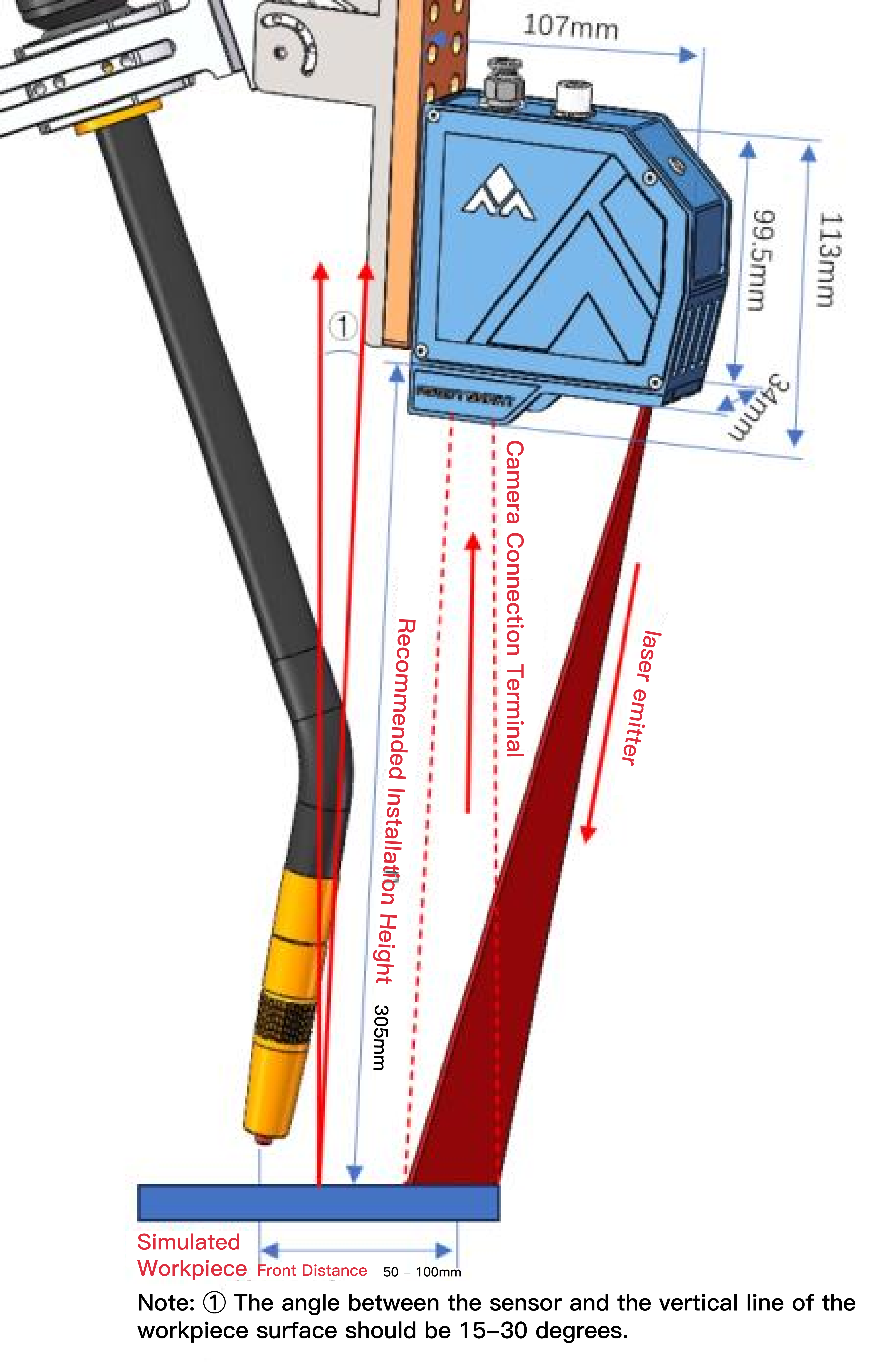
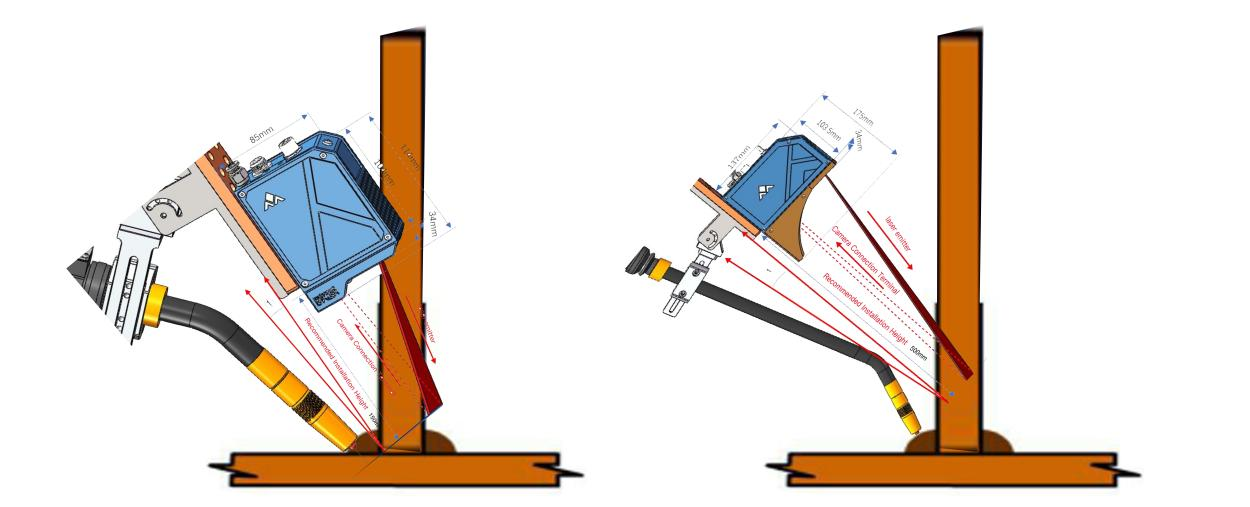
Օպտիմալ aedaկան հեռավորությունը մոտենում է 150 մմ-ի։
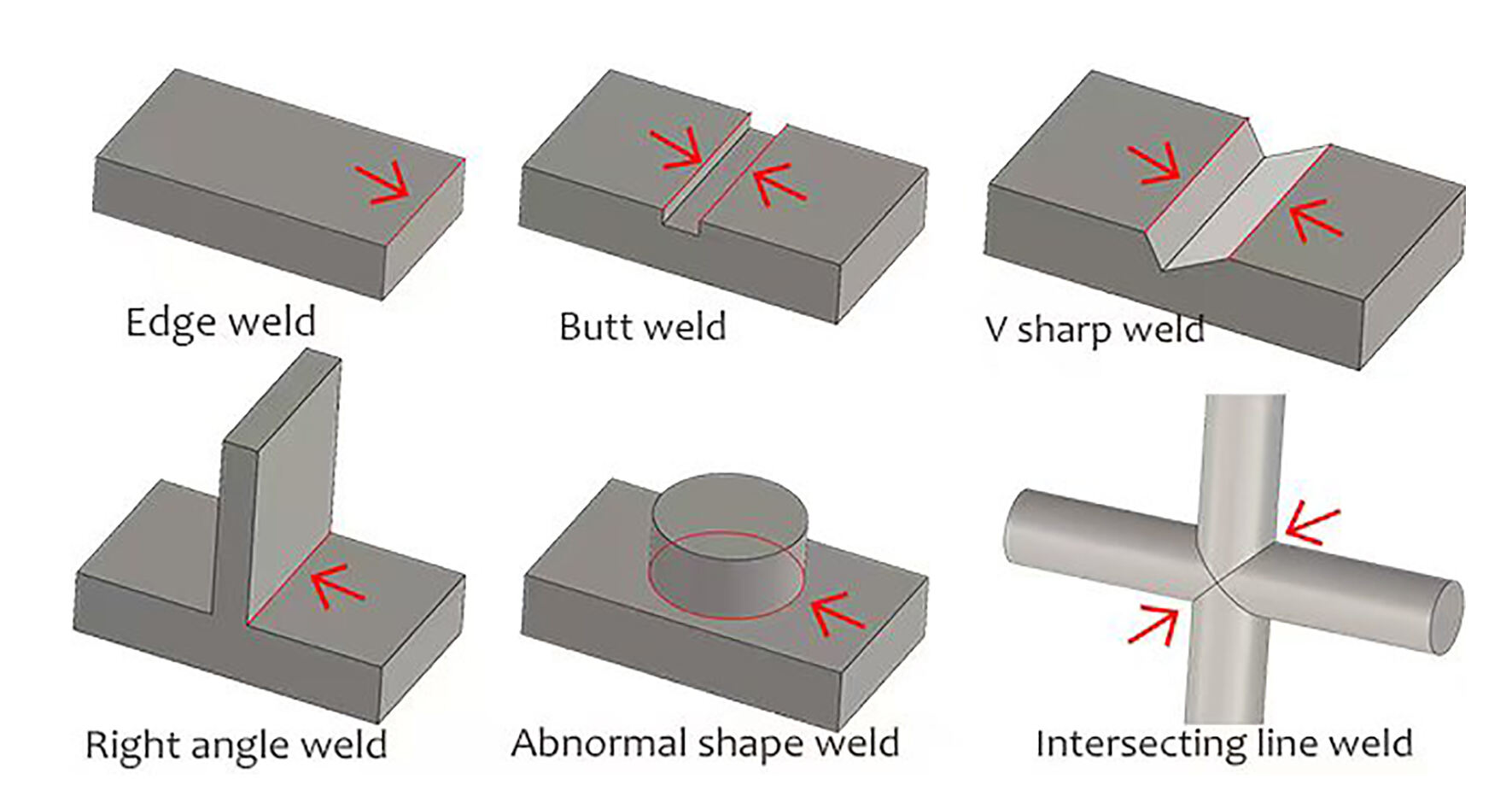
Համարվող համեմատություն
V-գագաթ համեմատություն
Կողմնակի համեմատություն
Համեմատություն համեմատության հետ
Ստորագրության համեմատություն
Նախորդ համեմատություններ, և այլն:
Երկար հեռավորություն ունի ուղղահայաց դիտարկման, լայն դիտարկման համար, պատրաստ է vardanq Steel Structure և Construction Machinery Industry -ի համար.
Խնդրում ենք ընտրել տիպը ռացիոնալ առնչվում է իրական կիրառման տիրույթին, ուղեղի համար կարող է անտարես սենսորի հետ, ռոբոտի բեռը ընդհանուրապես պետք է 20KG-ն լինի.
Համագործակցող գործընկեր

Համաձայն ռոբոտի մարկա







