Სეამ ტრექინგ სენსორები არის სპეციალიზებული მოწყობილობები, რომლებიც შე Gaussian-ს გავლენაში და სხვა ადამიანთან გაზიარებული ხედის მსგავსია. ისინი რობოტებს აძლევენ განახლებას და მიმდევრობას ზუსტად გზაზე, რომელსაც ისინი უნდა იყენებდნენ მასალების შეკრებისას. ჩაკრებული კავშირები არის კრიტიკული მსგავსებები ეს სენსორებისთვის, რომლებიც უზრუნველყოფენ რომ ჩაკრება იყოს სრულდებით ადგილზე კავშირში სწორ თევზე შეყვანით. არ აქვს ეს სენსორები, რობოტებს მათ მუშაობაში ერთად ერთი რთული იქნებოდა.
Სველის ტრეკინგის სენსორები მისი გამოყენებით GPS-ს მსგავსია. იგივე, როგორც GPS-ი ჩვენ გვეუბნება რომ წავა, ეს სენსორები რობოტებს მართავს, რომ ზუსტად სველი გაკეთონ. რობოტებისთვის თუ არ იქნებოდა ეს მისამართები, ისინი შეიძლება არასწორი ადგილებში განხორციელებდნენ სველს. ეს შეიძლება გამოწვევდეს საწინააღმდეგოდ და სიძლიერეში დანარჩენი სველები, რომლებიც შეიძლება გადახრის შემთხვევაში გადაჭრილი გახდეს. MINYUE ლაზერულ შეკუმშვის სენსორს რობოტებს შესაძლებლობა გაძლევს ზუსტი მარშრუტის მიმოსვლას, რათა რობოტი ყოველ სველზე ზუსტად და მარტივად განხორციელებდეს.

Სევამ ტრექინგის სენსორები არის საკმარისად განათლებული აპარატები. ისინი შეძლებენ ცვლილებას ხდინა სველის ინსტრუმენტში, როდესაც რობოტი მუშაობს. ეს უზრუნველყოფს, რომ სენსორები რეგულირებინ რამდენად ჰითი მიიღება სველს. ეს არის სასარგებლო, რადგან სწორი ჰითი ძალიან მნიშვნელოვანია იმის გარანტირებით, რომ ყველა ჩართვა ან გადალაპარაკება (სადაც ერთი სველი მდებარეობს მეორეზე) წაიშალოს საბოლოო სველში. MINYUE სევამ დეტექტორის სენსორი აძლევს რობოტებს შესაძლებლობას სველის გაკეთება სწრაფად და ეფექტურად. ამით არამატებით დააอมადებს დროს და გადავალი ხანგრძლივად დააზინარებს ფინანსებს.
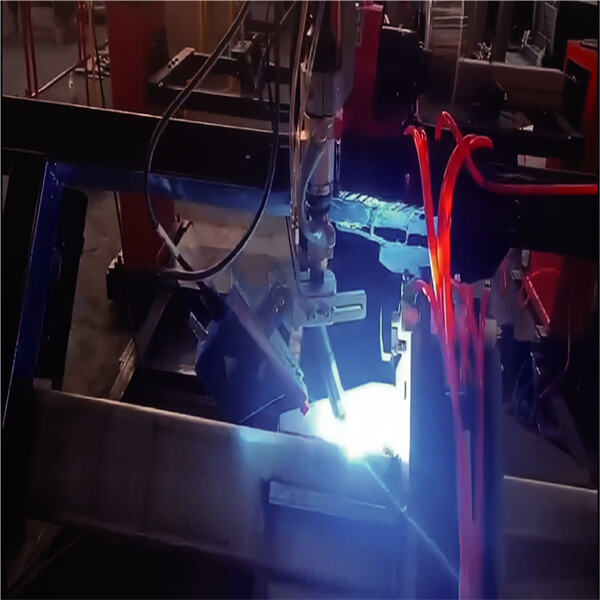
Სევამ მონიტორინგის სენსორები იყენებენ სპეციალურ კამერებს ან ლაზერებს სევამის სკანირებისთვის — იმ ხაზის, სადაც ორი ნაწილი ერთმანეთს შეიერთება. ისინი გენერირებენ უფრო ზუსტ რუკას რობოტისთვის. ეს სენსორები შეძლებენ სევამის მონიტორингს, მაგალითად, არის თუ არა ჩართვები ან გადალაპარაკებები, ასე რომ ისინი შეძლებენ განსაზღვრას, არის თუ არა ყველაფერ სწორად გადალაპარაკებული. როდესაც ისინი აღმოჩნიან ამ პრობლემებს, ისინი სწრაფად შეცვლის ხდებიან სველის ინსტრუმენტში იმ პრობლემების გამოსაცვლად. MINYUE Advanced welding seam tracker და მისცემული ტიპის განათლება და მორგების შესაბამისად ხელმისაწვდომად გამოყენების ფერდად მაღალი ხარისხის საჭიროების შესაბამისად გამოყენების ფერდად მაღალი ხარისხის საჭიროების შესაბამისად.

Ეს არის ძალიან განსაკუთრებული თვისება; რეალ-ტაიმი seam tracking sensors ის ამავე, როგორც რობოტი ან ნებისმიერი რობოტი, რომელიც შეიძლება ფიქროს და რეაქცია თავის მიერ. ეს ნიშნავს, რომ რობოტი უნდა უყუროს ერთობლივი ჩანართი და ადრე შეიცვალოს, როდესაც აუცილებელია. ეს აძლევს რობოტებს შესაძლებლობას უსრულების გარეშე ჩანართების შექმნა ადამიანთან ერთად. ეს არის საშუალება ჩანართების ხარისხზე და ასევე შეცდომების შემცირება სამუშაოდ ან მინიმალური შანსები სამუშაოდ აღდგენის საბოლოოდ დრო და ფულის შენახვა. ფაქტია, რეალ-ტაიმი ჩანართის მონაცემების გამოყენება არის თამაშის შეცვლა ჩანართებისთვის, რადგან ეს ხელს უწყობს მთლიანი პროცესი საკმარისი მარტივი და სწრაფი.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








