Ինչպե՞ս օգտագործվում են լազեր սենսորները հեռավորության չափում և օբյեկտի հայտնաբերումում։ Դրանք օգտագործում են լազերներ, որոնք նման են անտեսող սահմանափակագրերին, որոնք կարող են ճշգրիտ չափել բանալիքները։ Այսպիսով, օգտագործելով լազեր սենսորներ՝ մենք գիտենք, թե որքան հեռավոր է օբյեկտը մերից — իդեալապես, դրանք չեն պետք ունենալ շոշափել կամ օգտագործել սովորական չափման տուփ։ Ինչպես է աշխատում լազեր սենսորը։ Երբ լայնությունը հանդիսանում է օբյեկտին, այն վերադառնում է սենսորին։ Ապա լազերային սենսոր հեռավորության չափում որքան ժամանակ է գրավել ճառագայթը դուրս գալու և վերադառնալու. Դա ցույց է տալիս, թե որքան հեռու է օբյեկտը: Այն ոչ շատ տարբեր է այն ձայնային եկամուտից, որը օգտագործում են աղավնիները՝ ուղեկցելու միջոցով մืկնային պայմաններում: Աղավնիները արտադրում են ձայներ, և երբ այդ ձայները վերադառնում են, նրանք գիտեն, որտեղ են գտնվող օբյեկտները: Լազերային սենսորները իրականացնում են մի շատ նման գործողություն, բայց կախված են լուսային ալիքներից, իսկ ոչ ձայնից!
Երբ դու ստեղծում ես ինչ-որ բան գործkedներում, որտեղ շատ բաներ են ստեղծվում, այն արդեն շատ կարևոր է լինի շատ ճշգրիտ լինել։ Սխալեր կարող են հանգեցնել խնդիրներին, եթե մեքենան չկտրի կամ չտեղադրի բանալիքը ճիշտ տեղին։ Լազերային սենսորների աշխատանքն է համոզվել, որ մեքենան ճիշտ տեղում է կտրում և տեղափոխում մասնակիցները։ Այդպիսի ճշգրիտ չափումները թույլ են տալիս ստեղծել բաներ ավելի արդյունավետ և ճշգրիտ, ինչը անհրաժեշտ է բնագավառներում, որտեղ mooieն փոքր սխալներն կարող են արդյունավետություններ արարել։ Գործkedները օգտագործում են մեծ արագության լազերային սենսոր համար ստեղծել ճշգրիտ արտադրանքներ և նվազեցնել հանգույցը։

Երկարություն չափելու համար, օրինակ՝ անցատների երկարությունը կամ շենքի բարձրությունը, մենք օգտագործում ենք արդյունաբերության լազերային սենսոր . Դրանք շատ ճշգրիտ են, քանդրում են ստանդարտ չափումներից։ Կարող ենք արագ և հեշտ չափել երկար հեռավորությունները լազերային սենսորի օգնությամբ։ Այն նաև խուսափում է շատ ժամանակից և խանգարությունից աշխատարանում, որտեղ ծանր չափման սարքերը կարող են ձգտել աշխատողներին։ Լազերային սենսորները ունեն բարձր ճշգրտություն, որը թույլ է տալիս մեզ վստահել դրանց կողմից տրված չափումներին, դա դարձնում է դրանց ավելի տարածված տարբեր դեպքերում։

Սա պատճառն է, որ ռոբոտները հանգեցնում են անհամար բաներ՝ անենք մենք։ Օրինակ, դրանք կարող են գնալ տարածքեր, որոնք անվտանգ չեն մարդկանց համար։ Լազերային սենսորները թույլ են տալիս ռոբոտներին «տեսնել», ինչ է շուրջում դրանց, որպեսզի դրանք չհանգեցնեն օբյեկտներին կամ մարդկանց։ Սա կարևոր հնարավորություն է ապահովելու անվտանգությունը բազմության միջև հիվանդներ։ Եթե ռոբոտի կա լեզերային սենսորային դիմաց նրա համակարգում, նշանակում է, որ նա կարող է քայլել առանց կolliderելու որևէ օբյեկտի հետ։ Սա թույլ է տալիս ռոբոտներին համագործակցել մարդկանց հետ արդյունավետության մեջ, ապարատանոցներում, ստորագրանոցներում և mooieն հոսպիտալներում, դա դարձնում է դրանց անգամ օգտագործելի տարբեր դերերում։
Լազեր սենսորները օգտագործվում են այնքան ինուացիոն ձևերում, որոնք մենք չենք նույնիսկ դիտարկում։ Օրինակ, դրանք թույլ են տալիս ավտոմատ մաքնանշաններին տեսնել այլ մաքնանշանները և հանգեցնել ճանապարհի անտառներին։ Սենսորները թույլ են տալիս մաքնանշաններին զգալ, թե որքան մոտեն են այլ մաքնանշանները՝ որպեսզի դրանք կատարեն ան전 բանավորում։ Դրանք նաև օգտագործվում են բժշկական ոլորտում՝ հեռացնելով հետազոտությունները՝ չպետք է շոշափել հեռացնելով հասարակությունները։ Սա icularly օգտագործելու դեպքում կարող է լինել օգտակար, երբ հեռացնում ենք հասարակությունները, որոնք կարող են լինել վատական պատոգեններից պահպանվելու համար։
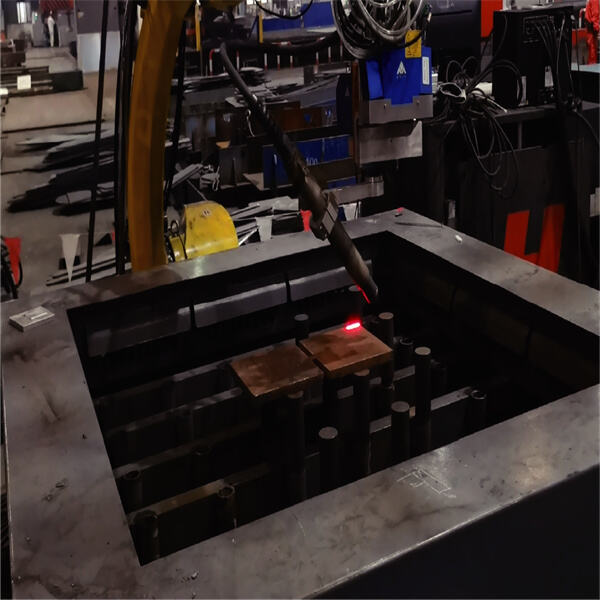
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








