Արդեն մտածել եք, թե ինչպես ստեղծվում են տարբեր այն բոլոր օգտագործվող և տեսնող բաները, որոնք օգտագործում ենք օրական. Երկար գույնի խաղահատերից մինչև արյուն մաշինների, մեր շուրջ բոլորը ստեղծվում է մի հատուկ տեղ, որը կոչվում է գործարան. Յուրաքանչյուր օր այդ գործարաններում կան մեքենաներ, որոնք անհանգստ ժամանակ միացնում են մասնիկ առ մասնիկ, ստեղծելով այն ապրանքները, որոնք օգտագործում ենք և սիրում ենք. Բայց ինչպես գիտեն այդ մեքենաները ճշգրիտ ինչ պետք է անել. Հատուկ լազերային սենսորները են գալիս օգնել! Մեկ այլ կարևոր բաղադրիչ է գործարանային լազերային սենսորները; դրանք են գործարանի մեքենաների աչքերը: Դրանք շատ լուսավոր տեսնում են մի հատուկ տեսակի լուսային պատկերով՝ անվանված լազեր։ Երբ օգտագործում ենք այս MINYUE-ն: ավտոմատացված ռոբոտական վառունք մեր մեքենաները կարող են չափել հեռավորությունները, հայտնաբերել բաներ և համոզվել, որ ամենինչ տեղադրված է այնպես, ինչպես պետք է։ Երբ այս տեղեկատվությունը կա մեքենաներին, դա կարող է օգնել արագացնել և ճշգրտեցնել մեքենաների աշխատանքը, ինչը հանգեցնում է գործարանային պրոցեսի անխափանց աշխատանքին։
Արդյունաբերության լազերային սենսորները հանգեցրել են գործարանները արտասահմանափակ ճշգրտության և ճշմարտության մակարդակներին։ Բայց այդ иնդուստրիալ համեմատական ռոբոտ սենսորները MINYUE-ից կարող են գրանցել նույնիսկ ամենափոքր փոփոխությունները, որպեսզի всё աշխատանքը կատարվի պլանով։ Այն չի բարձրացնում միայն արտադրանքների որակը, այլև է խուսափում ժամանակի և գումարի՝ հեռացնելով սխալները։ Բոլորը լավ աշխատեցին! Այն նորացնում է աշխարհային արտադրանքները՝ օգտագործելով արդյունաբերության լազերային սենսորային տեխնոլոգիա։ Այս սենսորները բավականին ինտելեկտուալ են՝ մեքենաների միջև գիտելիքներ փոխանցելու համար ժամանակի արագությամբ, այսինքն՝ տեղի տալով այնպիսի տեղեկատվության արագ փոխանցում։ Սա թույլ է տալիս ամենին արդյունավետ աշխատել և նվազեցնել դադարումները, այսինքն՝ այն ժամանակը, երբ մեքենաները չեն աշխատում։ Այս հանգամանքային տեխնոլոգիան թույլ է տալիս արտադրանքների ավելի շատ արտադրելու կոտորակային ժամանակում, տարատեսակային գործոններին տալիս անդամական գործադրություն։
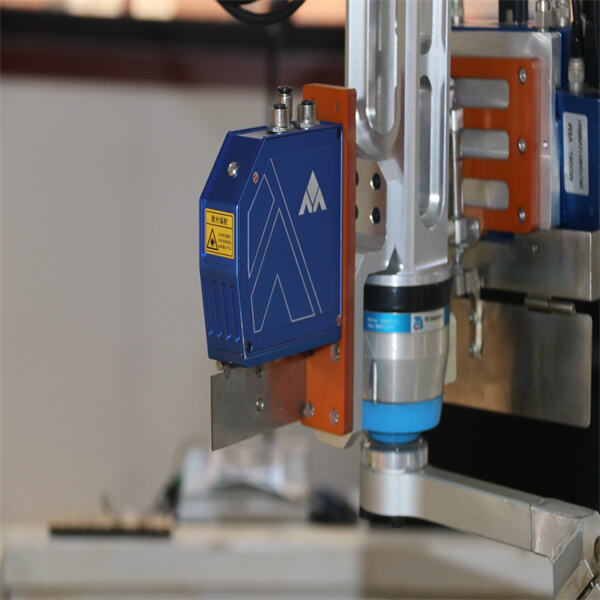
Հատուկ ստանդարտներին համապատասխանելու համար որակի կառավարումը կարևոր է արտադրանքների վերաբերյալ։ Դա նման է ձեր տնային աշխատանքը ստորագրելուց առաջ ստորագրելու։ Դուք ցանկանում եք համոզվել, որ դա ճիշտ է! robot laser welding machine mINYUE-ից սկաները օգտագործվում են չէլ միայն ապրանքների սկանավորման համար, այլև որպես որոշակի կառավարման միջոց արդյունաբերության բաժնում, ստորագրելով ամեն փոքր մանրամասն ապրանքի ստեղծման ժամանակ:
MINYUE-ի ինտելեկտուալ լազերային վիճbum ավտոմատացում ունի հնարավորություն որևէ հնարավոր սխալ կամ նախատեսված դեfects գտնելու արդյունաբերության գործընթացում: Այս սենսորների օգտագործմամբ, գործարանները կարող են նշել խնդիրները նախապես և լուծել դրանք, belum դրանք դառնան IOUS խնդիրներ: Սա սպասարկում է չինչ ապահովելու, որ ապրանքները են ամենաբարձր որոշակիության, այլև ստեղծել վստահություն օգտագործողների հետ, ովքեր ցանկանում են ամենալավ ապրանքները:
Ամենակարևոր աспектը ցանկացած աշխատանքային տարածքի մասին մտածելիս սafety է: Երբ գործում է գործարանների մասին, որտեղ տասնմիլիոններ մարդիկ և կանանց գործում են մեծ մաքնային և ռոբոտների հետ, այն անհրաժեշտ է համոզվել, որ յուրաքանչյուր մարդ է ամենավերջին ժամանակ ամենավերջին ժամանակ: Հատուկ լազերային սենսորները կարևոր են գործարանի ներսում անցկացվող բոլոր գործողությունների համար ամենագույն արդյունավետության համար և նաև ամենագույն ապահովության համար:
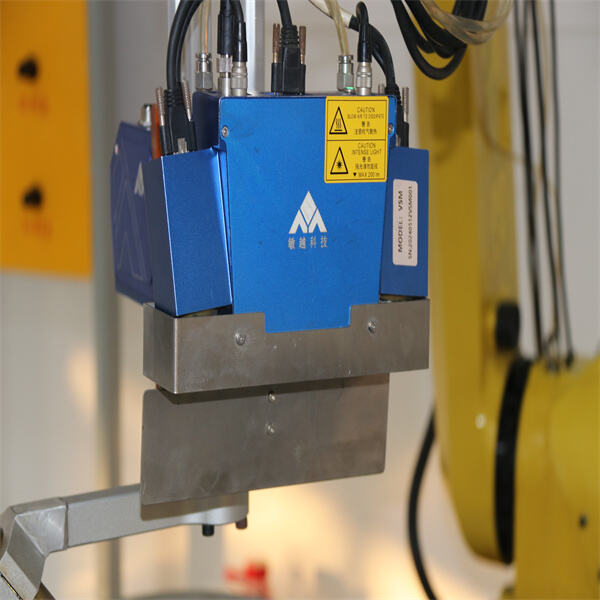
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








