Це означає, що сенсори є важливими для робот з ШІ . Вони як би є очима і вухами роботів. Як наші очі дозволяють нам бачити, як наші вуха дозволяють нам чути, сенсори дозволяють роботам бачити та розуміти своє навколишнє середовище. Роботи також можуть дізнатися про свій середовище через різні сенсори. Вони можуть виявляти такі речі, як рух, звук, дотик, а навіть відстань до об'єктів. Сенсори є необхідними, оскільки вони дозволяють роботам безпечно навіжуватися, приймати рішення та взаємодіяти з навколишнім середовищем.
У робототехніці сенсори MINYUE є необхідною частиною функціонування роботів, використовуючись для виконання заданих завдань. Сенсори надають роботам важливу інформацію, яка потрібна для точного та ефективного виконання їхньої роботи. Без сенсорів роботи майже не змогли б виявляти предмети на своєму шляху, уникати зіткнень та навіть слідувати напрямкам, поданим людьми. Сенсори: Ви можете уявити сенсори як мозок роботів, оскільки вони грають ключову роль у тому, як вони сприймають свіжаче середовище та реагують.
Сенсори дотику: сенсори дотику надають роботам змогу виявляти та взаємодіяти з об'єктами у їхньому середовищі. Коли робот зустрічає об'єкт, він полагається на сенсор дотику, щоб отримати інформацію про те, що він зустрів, що дозволяє йому відповідно реагувати.
Автономні роботи MINYUE — це роботи, які можуть працювати незалежно від людського втручання до великого ступеня. Функціонування цих роботів базується на великій кількості сенсорів, таких як лазерний світловий датчик які використовуються для спостереження їхнього середовища та забезпечення автономного виконання завдань. Спочатку розглянемо деякі ключові компоненти автономних роботів:
Цей роботи з штучним інтелектом збільшувати свої можливості та виконувати завдання ефективніше за допомогою різних датчиків. Наприклад, датчики світла можуть допомогти роботам знаходити світло і слідкувати за ним. Це означає, що якщо світло увімкнено, робот може підійти до нього. Датчики слуху: роботи можуть реагувати на голосові команди. Датчик звуку дає роботу знати, що людина каже, коли вона говорить.
Є датчики дотику MINYUE та лазерний датчик що надають роботам здатності взаємодіяти з об'єктами навколо них. Наприклад, якщо робот торкається стіни, датчик дотику повідомляє робота про необхідність зупинитися. Світлофори регулюють потік транспорту на дорозі. Вони також можуть вимірювати відстань до об'єкта, щоб робот міг безпечно переміщатися, не зіткнувшись з чимось.

З вищезазначеного ми бачимо, що сенсори є ключовими компонентами робототехнічної технології. Вони дозволяють роботам відчувати і звертатися до середовища. Зрозуміння різних типів сенсорів та унікальної ролі, яку вони грають у більшому контексті робототехніки, допоможе нам оцінити внесок таких маленьких компонентів у майбутнє робототехнічної технології.
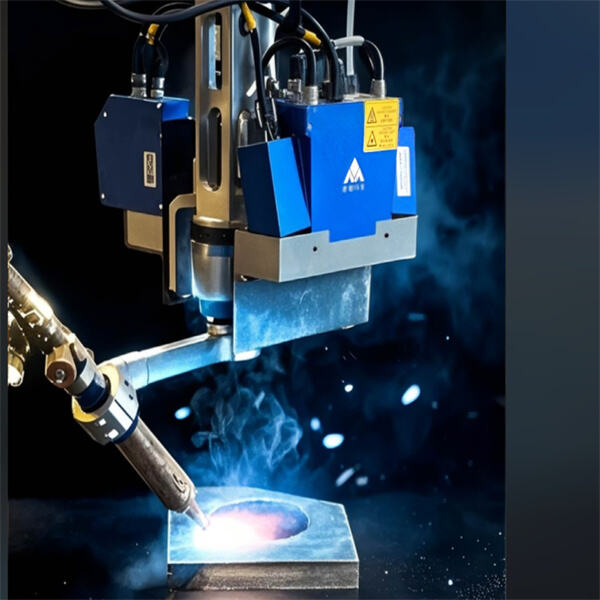
Впровадження функції пошуку та відстежування, сканування шва, підтвердження положення та інформації про шов, коригування положення шва між 3D цифровою моделлю та реальним деталевим заготовкою, а також вирішення проблеми зсуву шва через помилки вхідних матеріалів та термічну деформацію.
Швидко, точно, повністю БезПрограмування, висока ефективність та точність. Вирішує складний процес навчання традиційних роботів та економить час простою під час навчання.
Компанія Beijing Minyue Technology Co.,LTD, як світовий лідер у галузі високих технологій навчання інтелектуальних застосувань промислових роботів. Ми спеціалізуємося на гнучкому інтелектуальному виробництві з нашою саморозробленою системою RobotSmart - Система Інтелектуального Прийняття Рішень, SmartVision - Система Візуального Перегляду Бінарним Структурованим Світлом, та SmartEye - Лазерна Система Візуального Відстеження Швів. Представляємо нове покоління інтелектуальних розв'язань для зварювання і різання роботами.
Забезпечує потужні роботи-сварники з передньою завантажуванням, боковою завантажуванням, верхньою завантажуванням, мостовим монтажем, інтелектуальним плануванням траєкторій для кількох роботів, кількох зовнішніх осей та позиціонера для спільної роботи. Реалізує симуляцію руху робота, виявлення колізій, уникнення сингулярностей та детекцію обмежень осей.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








