Დაარ Gaussian ფიქრობთ, როგორ შეიქმნენ სხვადასხვა რამეები, რომლებიც ყოველდღიურად ვხედავთ და ვიყენებთ? ფერადი თოვების დანარჩენი მოწყობილობებისგან მოსახერხებელ მანქანების მდებარეობამდე, ყველაფერი ჩვენ გვერound განკუთვნილი ადგილზე წარმოადგენს ფაბრიკას. ყოველდღიურად ამ ფაბრიკებში მანქანები უტოლოდ შეიკრებენ ნაწილებს, რომ შექმნათ პროდუქტები, რომლებსაც ვიყენებთ და ვიყვნებთ. მაგრამ როგორ იცის ეს მანქანები ზუსტად, რა უნდა გაკეთონ? ინდუსტრიული ლაზერული სენსორები ადგილზე ახარისხებია! მეორე ძირითადი ელემენტია ინდუსტრიული ლაზერული სენსორები; ისინი არის მანქანების „თვალები“ ფაბრიკის სართულზე. ისინი ძალიან ნაკლებად ხედავენ გამოყენებით განსხვავებული ტიპის სინათლის, რომელსაც ლაზერი უწოდებენ. როდესაც ვიყენებთ ეს MINYUE ავტომატური რობოტული საკერძო , ჩვენი მანქანები შეძლებენ მას საშუალებას მანძილის ზომვა, რამეს განახლება და დარწმუნება, რომ ყველაფერი არის ადგილზე. როდესაც ეს ინფორმაცია ხელმისაწვდომია მანქანებს, ის შეიძლება გამოიყენოს მანქანების სწრაფი და ზუსტი მუშაობის საშუალებისთვის, რაც განაპირობებს წარმოების პროცესის გარკვეულად გარკვეულად მუშაობას გარეშე ნებისმიერი მაგრამ.
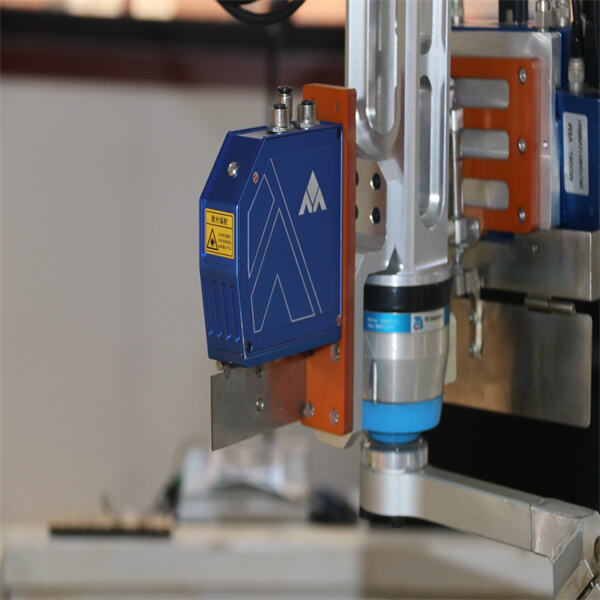
Ინდუსტრიული ლაზერული სენსორები დაეხმარეს ფაბრიკებს მართვის და ზუსტი განსაზღვრის საშუალებით მაღალი დონის პრეციზიურობა და ზუსტობა. მაგრამ ეს სამრეწველო შედუღების რობოტი სენსორები MINYUE-დან შეძლებს გამოიყენოთ ნებისმიერი, még a legმცირესი ცვლილებები, რათა ყველა იქნება გაკეთებული განვითარების ხელით. ეს არ მ查看详情nა მხოლოდ ხარისხიანი პროდუქტების შექმნას, არამედ დახმარებას დროსა და ფულზე მოხდენით შეცდომებისა და შეცდომების არ მოხდენით. ყველა კარგად გაკეთებულია! ის გლობალური ფაბრიკების ინდუსტრიული ლაზერული სენსორული ტექნოლოგიით რევოლუციას წარმოადგენს. ეს სენსორები საკმარისად ინტელექტუალურია, რათა ცოდნა გადაიტანონ მაशინებს დროის სიჩქარით, ანუ ინფორმაცია გადაიტანონ უწყვეტი რეჟიმში. ეს აძლევს შესაძლებლობა ყველას ეფექტურად მუშაობის და დანაშაულის მინიმიზაციას, ანუ როდესაც მაशინები არ მუშაობს. ეს საკვარატური ტექნოლოგია აძლევს ფაბრიკებს შესაძლებლობას მეტი პროდუქტის შექმნაში მеньობით დროში, რაც მათ აძლევს კონკურენტულ წვდომას ინდუსტრიაში.
Ხარისხის კონტროლი არის განსაკუთრებით მნიშვნელოვანი ასpekti პროდუქტების შესაბამისობის დაზღვევისთვის განსაკუთრებით სტანდარტებს მიღწევამდე მომხმარებლებს. ეს მართლაც მიმართულია თქვენს საშუალო შემოწმებას თქვენი სამუშაო გავლენას გაbelum გადაცემისთვის მას თქვენს მასწავლებლს. თქვენ გინდათ დარწმუნებული იყოთ, რომ ის ზუსტია! რობოტული ლაზრის საკრური მანქანა mINYUE-ს გამოყენებული არ არის მხოლოდ პროდუქტების სკანირებისთვის, არამედ ინდუსტრიულ სექტორში კვალიტეტის კონტროლისთვის, პროდუქტის შექმნისას ყოველ ცოტა ასპექტის შემოწმებისთვის.
MINYUE-ის ინტელექტუალური ლაზრის საერთიანებო ავტომაცია მის შესაძლებლობაა ნებისმიერი შესაძლო შ Gaussian ან ნებისმიერ დეფექტის განსაზღვრა პროდუქციის პროცესში. ეს სენსორების გამოყენებით, ფაბრიკებს შეუძლია ამ პრობლემების აღმოჩენა და მოგვიანება ადრე, ვიდრე ისინი გახდებიან სერიოზული პრობლემებად. ეს არ არის მხოლოდ კვალიტეტის უმაღლესი დონეზე დარწმუნების მიზნით, არამედ მომხმარებლების დასანდობარობის შექმნით, რომლებიც გსურთ უკეთესი პროდუქტები.
Ნებისმიერი სამუშაო ადგილის შესახებ განსაზღვრული ყველაზე გარკვეული მხარე არის სარეზო საფეხური. ფაბრიკების შესახებ, სადაც მილიონები მამაკაცი და ქალები მუშაობენ დიდი მაशინების და რობოტების საერთო დიაპაზონზე, აუცილებელია დარწმუნება, რომ ყოველი ადამიანი 100% დროს არის სარეზოდ. ინდუსტრიული ლაზრის სენსორები ძვირად არიან ფაბრიკის შინაარსის მონიტორингისთვის, რათა ეფექტიურობა მაქსიმალიზებული იყოს, სარეზო პრიორიტეტის გათვალისწინებით.
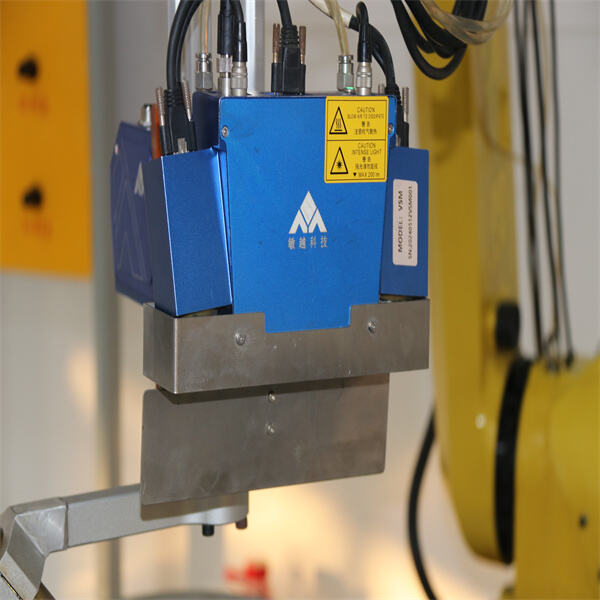
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








