Nač sa používajú laserové senzory pri mierení vzdialenosti a detekcii objektov? Používajú lasery, ktoré sú ako neviditeľné meradlá, ktoré môžu merat veci veľmi presne. Takže pomocou laserových senzorov teraz vieme, ako ďaleko je od nás objekt – ideálne, nemusia mať kontakt alebo používať bežnú mieraciu pásku. Ako vlastne funguje laserový senzor? Priemer sa odráža späť na senzor, keď narazí na objekt. Potom laserový snímač na meranie vzdialenosti meria, ako dlho trvalo, kým sa priemer vrátil. To nám hovorí, ako ďaleko je objekt. Je to trochu ako to, ako používajú netopieri ecolocaciú na navigáciu v tmavej. Netopieri vyžiera zvuky, a keď sa zvuky vrátia, vedelia, kde sú okolité objekty. Laserové senzory dosahujú niečo docela podobné, len že spoliehajú na svetlo namiesto zvuku!
Keď vyrábate veci v továrňach, kde sa vyrobí mnoho vecí, je mimoriadne dôležité byť veľmi presní. Vznikajú problémy, keď stroje neorezávajú a neurčia veci presne tam, kam majú. Je to úloha laserových senzorov, aby zaistili, že stroje režú a presunujú časti na správne miesto. Takáto presná meranie umožňuje vytvárať veci efektívnejšie a presnejšie, čo je kritické v odvetviach, kde aj malé chyby môžu stáť veľa. Továrne využívajú vysokorychlostný laserový senzor na výrobu presných produktov a zníženie marnotratnosti.

Na meranie vzdialenosti, ako je dĺžka chodby alebo výška budovy, používame priemyselný laserový senzor . Sú oveľa presnejšie než bežné merné pásy. Dokážeme merať dlhé vzdialenosti rýchlo a jednoducho pomocou laserového senzora. Usporiada to veľa času a zjednoduší prácu na stavenisku, kde ťažké mieradlá bránia pracovníkom vykonávať ich úlohy. Laserové senzory majú vysokú presnosť, čo nám umožňuje veriť meraniam, ktoré poskytujú, čím sa stali dostatočne široko rozšírenými v rôznych situáciách.

Preto sú roboti úžasní, dokážu robiť veci, ktoré my nedokážeme. Napríklad môžu ísť do oblastí, ktoré sú pre ľudí príliš nebezpečné. Laserové senzory umožňujú robotom „vidieť“ okolo seba, aby nenarazili do predmetov alebo ľudí. Toto je kritická schopnosť pre zabezpečenie bezpečnosti skupín pacientov. Ak má robot laser sensor camera v jeho systéme znamená, že pravdepodobne dokáže chodiť bez kolízie s objektom. To umožňuje robotom spolupracovať s ľuďmi v továrňach, skladoch a dokonca aj v nemocniciach, čo ich robí veľmi užitočnými v rôznych rolách.
Laserové senzory sa používajú takmer vo všetkých inovatívnych spôsoboch, o ktorých by sme si možno vôbec nemysleli. Napríklad, umožňujú samoopravným autám vidieť ostatné vozidlá a vyhýbať sa dopravným nehodám. Senzory umožňujú autám zisťovať, ako sú blízko ostatným vozidlám - aby mohli robiť bezpečné vozecké rozhodnutia. Používajú sa tiež v zdravotníctve na monitorovanie životných funkcií pacientov bez ich dotýkania. To môže byť špeciálne užitočné pri starostlivosti o pacientov, ktorí môžu byť v zraniteľnej situácii alebo vyžadujú ochranu pred patogénmi.
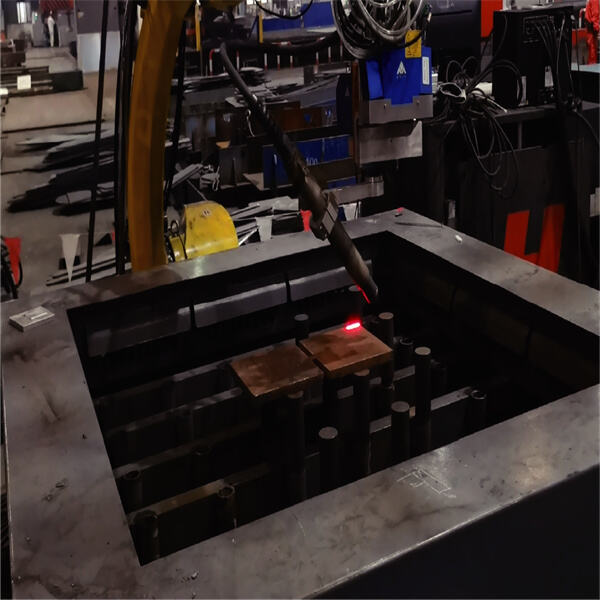
Použitie funkcie vyhľadávania a sledovania, skenovanie spojovacieho švu, potvrdenie polohy a informácií o šve, korekcia polohy švu medzi 3D digitálnym modelom a skutočnou konštrukciou, riešenie problému posunutia švu kvôli chybám v príchodných materiáloch a tepelnej deformácii.
Beijing Minyue Technology Co.,LTD, ako svetový vedúci vysoko technologický podnik v oblasti nevyučovacích inteligentných aplikácií priemyselných robotov. Specializujeme sa na flexibilné inteligentné výrobné procesy s nami samostatne vyvinutými systémami: RobotSmart - Systém Inteligentného Rozhodovania, SmartVision - Systém Dvojhlavnej Strukturovej Svetelnej Vizualizácie a SmartEye - Laserový Systém Pre sledovanie Švarov. Ponúkame nové generácie riešení pre inteligentné robotické spájanie a rezačku.
Rýchle, presné, úplne Bezo-Programovania, vysoká efektivita a presnosť. Rieši komplikovaný proces vyučovania tradičných robotov a ušetrí čas zastavenia pre vyučovanie.
Poskytujú sa výkonné predná časť robotického spájača, bočné nahratovanie, prevrátené nahratovanie, mostové montovanie, inteligentné plánovanie trajektórií pre viacerých robotov, viacerých vonkajších osí a pozicionéra pre spoluprácu. Realizácia simulačného pohybu robota, detekcia kolízie, vyhýbanie sa singularitám a detekcia obmedzenia osí.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








