Všetci vieme, že práca s robotmi môže byť ťažká, ale keď máte správne informácie a trochu cviku, môže byť veľmi jednoduchá. MINYUE tu je, aby vás vzdelávala o rukovodi robotmi a urobila to najlepším spôsobom. Tento príručka bude obsahovať, ako operačovať systém rukovania s robotmi , ako ovládať ich pohyby, a ako to robiť bezpečne a efektívne.
Najprv všetko o rôznych druhoch robotov. Existujú dva hlavné typy robotov, ktoré je potrebné poznať: pevne nainštalované roboty a mobilné roboty. Keď hovoríme o pevných robotoch, sú to tie, ktoré vôbec nekývnu. Obvykle sa používajú v továrňach na úlohy, ako sú montáž komponentov. Na oprotie tomu sú mobilné roboty vyrobené na navigáciu v prostredí a presunutie. Tieto roboty sú mobilnou formou robotov, ktoré sa bežne používajú na dodávky alebo úklid. Je dôležité pochopiť rozdiel medzi týmito typmi, pretože vám to umožní spraviť správny výber a vybrať správneho robota na úlohu, ktorú musíte vykonať.
Teraz sa pozrime na ovládanie robota MINYUE. Základné rozhranie na pohyb robota môže byť joystick alebo série tlačidiel, ktoré sa používajú na ovládanie pohybu všetkých štyroch smerov. Praktikovanie s ovládaním je nevyhnutné, aby ste sa zvykli na to, ako sa robot pohybuje a reaguje. Robota je možné programovať pomocou kusov pokynov nazývaných kód. Tento kód dáva robotovi pokyny, ako sa má pohybovať a aké úlohy má vykonať. Aby ste ovládli robotiku, musíte ovládať programovanie, čo je teraz základnou schopnosťou.
Existuje tiež potreba, aby roboti sa pohybovali komplexnými spôsobmi, a to môže byť zložitejšie. Keďže niektoré z týchto vecí sú dosť zložité, snažíme sa ich rozdeliť na správne úseky. Napríklad, predpokladajme, že chcete presunúť robota z jedného konca miestnosti na druhý. Najprv môžete musieť znovu orientovať robota, aby mal správny smer. Potom ho posuniete dopredu trochu a potom ho musíte otočiť, aby sa dostal tam, kam ho potrebujete. To urobí MINYUE automatizovaní roboti na materiálovú obsluhu ľahšie ovládať robota. Môžete tiež použiť senzory, ktoré umožňujú robotovi pochopiť jeho prostredie. Senzory pomáhajú robotovi vyhýbať sa prekážkam a navigovať hladšie, čím sa vám ako obsluhe uľahčí práca.

Ľubovoľný čas strávený vyhýbaním sa osvojeniu zručností v ovládaní robota je stratný čas. Čím viac trénujete, tým viac sa zvyknete na robota a tým viac si budete pribúdať sebavedomia pri jeho ovládaní. Môžete tiež precvičovať svoje zručnosti úpravou programovania robota. Dokáže urobiť drobné úpravy v kóde, ktorý ste napísali, aby sa pohyb robota stal efektívnejším a jeho pohyby precíznejší. Pravidelnou praxou a potrebnými zmenami sa vaše zručnosti v ovládaní robóticky ovládané svařovacie rameno vylepšia významne.

Keď sa výberá s robotmi, bezpečnosť je jednou z najdôležitejších priorít. Vždy dodržiavajte bezpečnostné pravidlá a postupy, aby ste sa vy a druhí udržali v bezpečí. Keď pracujete s robotmi, musíte byť vedomí svojho okolia, pretože niekedy môžu hybaviť bez upozornenia. Na zjednodušenie operácií sa uistite, že správny robot vykonáva požadovanú úlohu. Napríklad, ak potrebujete presunúť ťažké predmety, použite robota navrhnutého na zdvihanie a prepravu ťažších nákladov. Okrem toho vám senzory a automatizácia môžu pomôcť dosiahnuť viac za menej času a energie. Automatizácia môže vykonať časť práce za vás, čo vám ušetrí čas a uľahčí vašu prácu.
Rýchle, presné, úplne Bezo-Programovania, vysoká efektivita a presnosť. Rieši komplikovaný proces vyučovania tradičných robotov a ušetrí čas zastavenia pre vyučovanie.
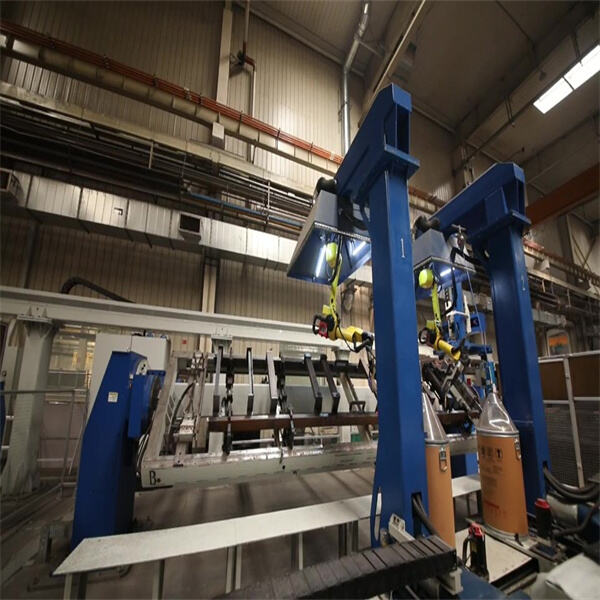
Beijing Minyue Technology Co.,LTD, ako svetový vedúci vysoko technologický podnik v oblasti nevyučovacích inteligentných aplikácií priemyselných robotov. Specializujeme sa na flexibilné inteligentné výrobné procesy s nami samostatne vyvinutými systémami: RobotSmart - Systém Inteligentného Rozhodovania, SmartVision - Systém Dvojhlavnej Strukturovej Svetelnej Vizualizácie a SmartEye - Laserový Systém Pre sledovanie Švarov. Ponúkame nové generácie riešení pre inteligentné robotické spájanie a rezačku.
Poskytujú sa výkonné predná časť robotického spájača, bočné nahratovanie, prevrátené nahratovanie, mostové montovanie, inteligentné plánovanie trajektórií pre viacerých robotov, viacerých vonkajších osí a pozicionéra pre spoluprácu. Realizácia simulačného pohybu robota, detekcia kolízie, vyhýbanie sa singularitám a detekcia obmedzenia osí.
Použitie funkcie vyhľadávania a sledovania, skenovanie spojovacieho švu, potvrdenie polohy a informácií o šve, korekcia polohy švu medzi 3D digitálnym modelom a skutočnou konštrukciou, riešenie problému posunutia švu kvôli chybám v príchodných materiáloch a tepelnej deformácii.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









