Ar liecinieku palīdzību, kas izsekājuši līniju, šie noderīgie ierīces var palīdzēt robotiem sekojot līnijai un saglabājot pareizo maršrutu. Šos lieciniekus var uzskatīt par robotu acīm. Mūsu acis mums ļauj redzēt, kur mēs ejam, līdzīgi tam, kā šie liecinieki ļauj robotiem zināt, kā viņiem jākustas. MINYUE līnijas sekosanas liecinieki ir būtiski, lai roboti strādātu ar precizitāti, pārvietojoties cauri dažādiem vietumiem, lai izpildītu uzdevumus. Apskatīsim vēl dažus detaļas par to, kā darbojas šie liecinieki un kas viņus padara nozīmīgos dažādos scenārijos.
Līnijas sekosanas liecinieki dara to, ko viņu nosaukums norāda — tie sekājuši līniju, kas protināta uz zemes. Tie to dara, emitējot to, ko sauc par infrasarkanu gaismu. lasera staru sensors projicē gaismas starus un pēc tam mēra, cik daudz no šīs gaismas atgriežas uz senzoru. Ja sensors noteic līniju uz grunda, tas nosūta ziņu robotam. Šī ziņa norāda robotam mainīt kursu, lai paliktu uz ceļa. Tas ir līdzīgi spēlei, kurā robots jāpaliek uz līnijas, neaizkrišot no tās!
Tomēr, lai robots varētu veikt uzdevumus paši bez cilvēku palīdzības, līnijas sekotāju senzori tiek uzskatīti par svarīgu automatizācijas procesa daļu. Piemēram, ja robotam jānonāk no punkta A līdz punktam B, visu, ko tam jādara, ir vienkārši uzturēties uz līnijas uz zemes. Tas palīdz robotiem videās, kurām nepieciešams darboties dažādos zonās. Šī tehnoloģija ir arī diezgan pazīstama robotu konkursu jomā. Robotiem konkursos jānavigējas cauri labirintiem vai jāsekot maršrutiem, lai risinātu izaicinājumus. Tātad, kas tos lasera tuvumā esošais sensors palīdz šajā uzdevumā!
Senzori līnijas sekas palīdz robotiem orientēties sarežģītās vides un pārvietoties no vienas malas uz otru. Šādas iestatījumus var būt, piemēram, aukstas noliktavas vai fabrikas, kur notiek daudz darbības vienlaikus. Lietojot līnijas, kuras jāsekā, roboti droši un efektīvi var pārvadāt priekšmetus no viena punkta uz citu. MINYUE senzori līnijas sekas ir ļoti svarīgi, jo tie palīdz robotiem no dažādām rūpnieciskajām nozarēm kustēties ātrāk un precīzāk. Visi šie rūpniecības lasersensors beidzot ļauj robotiem veikt savu darbu daudz ātrāk un ar pieaugušu precizitāti.

Jau kopš dažiem gadiem daži automātiski vadītie transportlīdzekļi arī prasa senzorus līnijas sekas. Kad brauc pa ceļu, parasti paliek savā jomā, un tas pats attiecas uz šiem lazers līmeņa senzors palīdz to izdarīt, braucot. Tie arī ļauj autonomijai automobiļiem izvairīties no šķēršļiem vai objektiem ceļā. Līniju un citas ceļa zīmes noteikšana atvieglina šo tipa automobiļu spēju pieņemt sapratiskus lēmumus par to, kā svirt un kad palielināt ātrumu utt. Tas nodrošina to drošu un gludu darbību, līdzinoties cilvēka operatoram.

Ražotavās MINYUE līnijas sekosanas senzori tiek izmantoti, lai vadītu robotus un mašīnas uz ražošanas līnijām. Nepieciešams ir bez defektu montāžu ražotavā. Šie lasera gaismas detektors nodrošina, ka viskas ir pareizi un produkts cauri ražošanas procesam plūst gludi. Visā pasaulē uzņēmumi uzticās viņu līnijas sekosanas senzoriem, lai maksimāli paaugstinātu savu ražošanas līnijas efektivitāti un precizitāti. Ar šiem senzoriem aprīkotas ražotavas var ražot produktus efektīvāk un ar mazākiem kļūdu skaitiem.
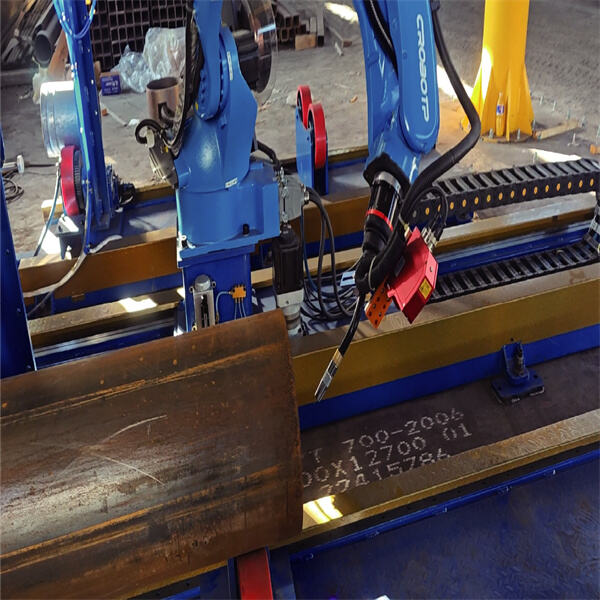
Pieņemot funkciju meklēšanai un uzsekošanai, skenējot svārku līnijas, apstiprinot svārku līnijas pozīciju un informāciju, koregujot svārku līnijas pozīciju starp 3D digitālo modeli un faktisko darbību, risinot problēmu ar novirzi, kas radusies materiālu kļūdu un termiskās deformācijas dēļ.
Beijing Minyue Technology Co.,LTD, kā pasaules vadošā augsttehnoloģiju uzņēmuma robotiku neatmiņošajā intelektuālā lietojumprogrammu jomā. Mēs specializējamies elastīgā intelektuālā ražošanā, izmantojot mūsu pašu izstrādāto RobotSmart - Intelektuālo Lēmumu Sistēmu, SmartVision - Divu Acu Strukturālā Gaismas Redzamības Sistēmu un SmartEye - Lazerredzamā Jostu Sekojanas Sistēmu. Mēs piedāvājam jaunu paaudzi intelektuālu robotu svārkošanas un griešanas risinājumu.
Ātri, precīzi, pilnīgi Bez-Programmēšanas, ar augstu efektivitāti un precizitāti. Tas risina tradicionālo robotu sarežģīto apmācības procesu un saglabā apmācības procesa pārtraukumu.
Sniedz spēcīgus svārkošanas robotus ar priekšielādi, malas ielādi, apgrieztu ielādi, jumta montāžu, intelektuālu trajectoru plānošanu vairākiem robotiem, vairākiem ārējiem ass un pozicionētāju sadarbību. Sasniedz robotu kustības simulāciju, satiksmes noteikumu pārkāpumu noteikšanu, vienības izvairīšanos un ass robežu noteikšanu.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








