 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



SLHA-120 Lazer.lvaza sekmju sekotājs
Ar pozīcijas noteikšanu, reāllaika novērošanu, skenēšanu un automātisko svaidīšanas funkciju.
- Pārskats
- Atbalsta robotu zīmolu
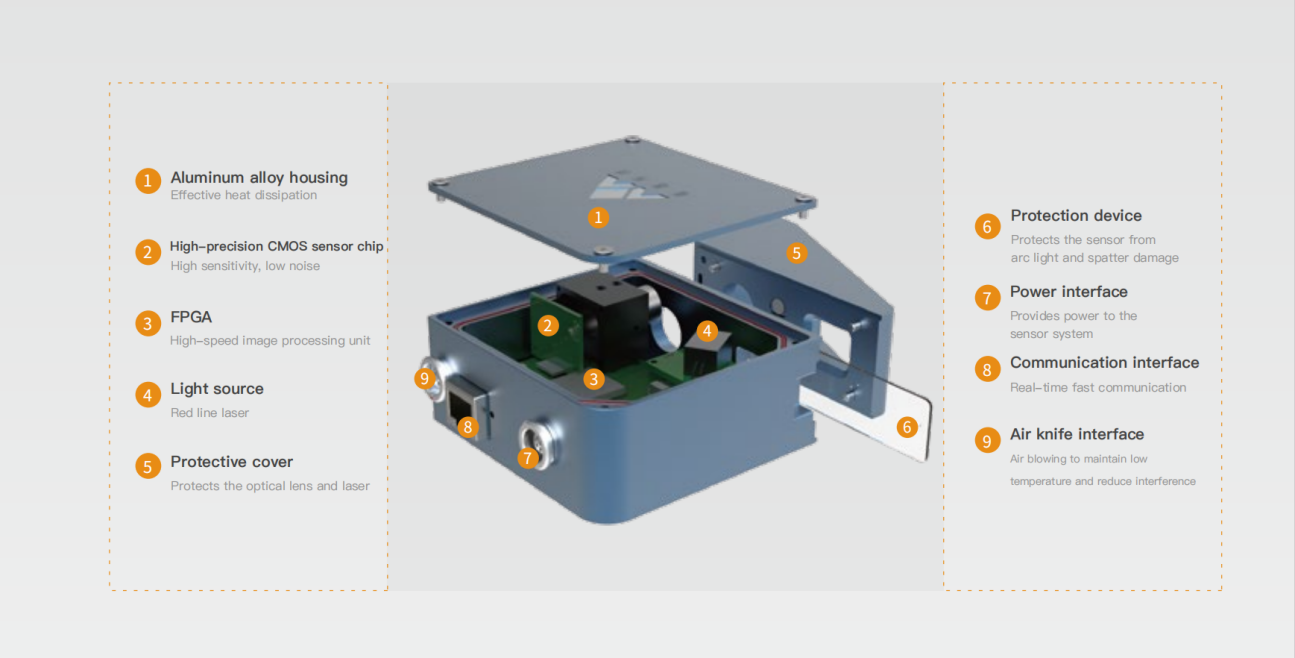
Lazeru jūras līnijas sekotāja senzors izmanto lasera, lai apgaismo saliekuma jūras līnijas virsmu, veidojot lasera gaismas juvu, kas tiek saņemta un attēlota ar augstas atšķirības kameru. Ar algoritmisko apstrādi trīsdimensiju saliekuma jūras līnijas īpašības tiek pārvērstas par strukturētu informāciju, ieskaitot saliekuma savienojuma koordinātām, neatbilstību, tukšumiem utt. Šī informācija tiek pārraidīta robota kontrolierim, nodrošinot robotam nepieciešamos trajektorijas un procesa parametrus saliekšanai, vadot roboto saliekšanas vai reālajā laikā darbjautāju novirzību korrekcijai, sasniedzot ideālu saliekšanas darbu. Salīdzinājumā ar citiem risinājumiem, laseru jūras līnijas sekotājs piedāvā priekšrocības, piemēram, nekontaktu, augstu precizitāti, ātru ātrumu un labu pielāgojamību.

Sensors izmanto lineāru struktūrizētu gaismas mērīšanu, kas piedāvā ātru līnijas attēlošanas ātrumu, nav kontakta un nav mehāniskiem kustībām; Spējīgs pielāgoties dažādiem apstākļiem, iespējams izvadīt svārstības parametrus; Pilnībā iebūvēts, ar ārējiem rūpniecības kontroles datoriem un daudz citiem priekšrocībām, tas plaši tiek izmantots dažādos automātizētos svārstības procesos. Neatkarīgi no svārstības metodes, mēs varējam nodrošināt uzticamu atbalstu un stabili darbību, lai nodrošinātu lieliskus rezultātus dažādās svārstības situācijās.
Pilna grafiskā programmatūras lietotnes saskarnē ir pieejams parametru iestatīšanas process, palīdzības izvēlnes detaļas, un pat neprofesionāli var viegli sākt darbu.
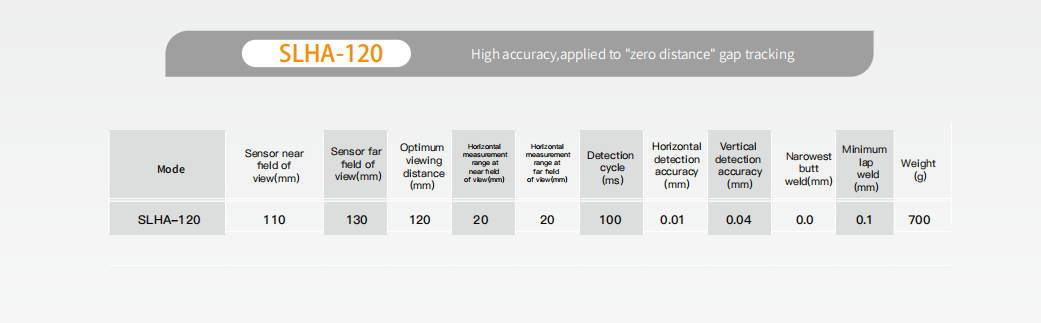
*Nulles tukšuma noteikšana attiecas uz senzoru ar šo funkciju, kas spēj identificēt tukšumus zem 0,1 mm.
*Redzes attālums ir tikai orientējošs un to var pielāgot atbilstoši konkrētajiem lietotāja vajadzībām
Sensors ir piemērots visstraujamākajiem pielietojumiem, jo tas ir nejutīgs pret strupceļa gaismu, ūdeni un pulveriem (IP67) un neatkarīgs no elektromagnētiskām radiācijām (EMC).
Ar spēcīgu funkciju.
01. pozicionēšana un novirzes korrekcija
Pozicionēšanas un novirzes korrekcijas funkcija tiek izmantota dažādu darba gabalu elastīgiem svārstības scenārijiem, kur vienmērīgi modeļi ir ar nesaskanīgām tolerancēm. Šī funkcija nodrošina, ka pārejot uz citiem darba gabaliem nav nepieciešama manuālā iejaukšanās, un robots tiek vadīts ar sistēmu pozicionēšanas un novirzes korrekcijai, lai sasniegtu precīzu svārstību.
Divpunktu pozicionēšana piemērota taisnas līnijas 2D nobīdes svārstībai.
Vielkārtējā novietojuma sistēma, piemērota vairāku segmentu 2D nobīdes svārkošanai
Segmenta novietojums, piemērots vairāku segmentu 3D nobīdes svārkošanai.
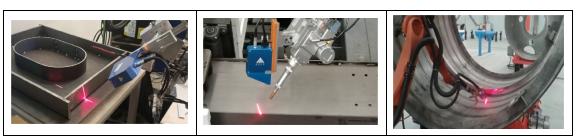
02 Reālā laika sekotājs
Reālā laika sekotāja funkcija tiek izmantota svārkošanas situācijās, kur nepieciešama augsta efektivitāte un nav telpas interferences. Sēnsors ir fiksēts attiecībā pret svārkošanas flambu, un svārkošanas flamble automātiski pielāgo svārkošanas maršrutu saskaņā ar 3D koordinātu dati.
03. Skenēšana un automātiska svārkošana
Skenēšanas un automātiskās svārkošanas funkcija ļauj sēnсорam vispirms iegūt ģeometriskās informācijas par svārkiem. Šī funkcija ir piemērota augstas atstarojošajām, tumšajām svārkošanas vietām un sarežģītām svārkošanas situācijām.
Lazer svārku sekotājs
Lazer svārku sekotājs var noteikt augstumu, zemumu un kreiso vai labo svārku novirzi.
Var noteikt svārkus ar mazām starpībām.
Risinājums plānu plāksnēju svārku sekotāja problēmai.
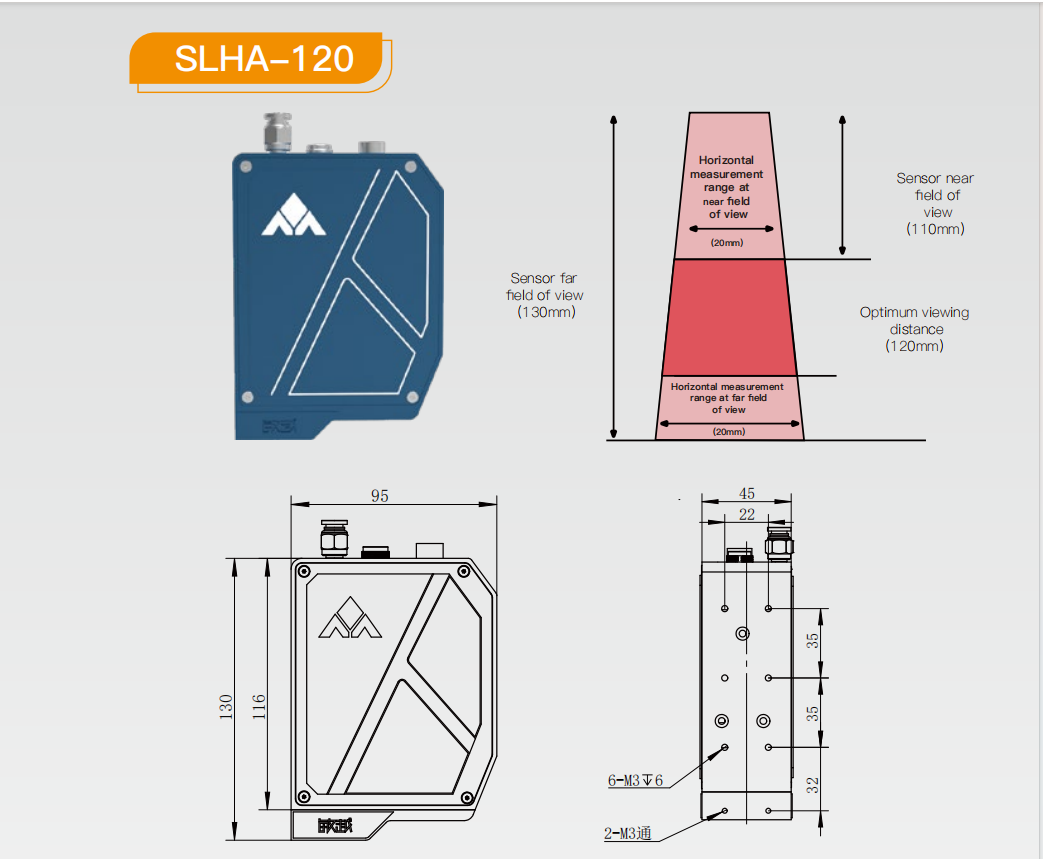
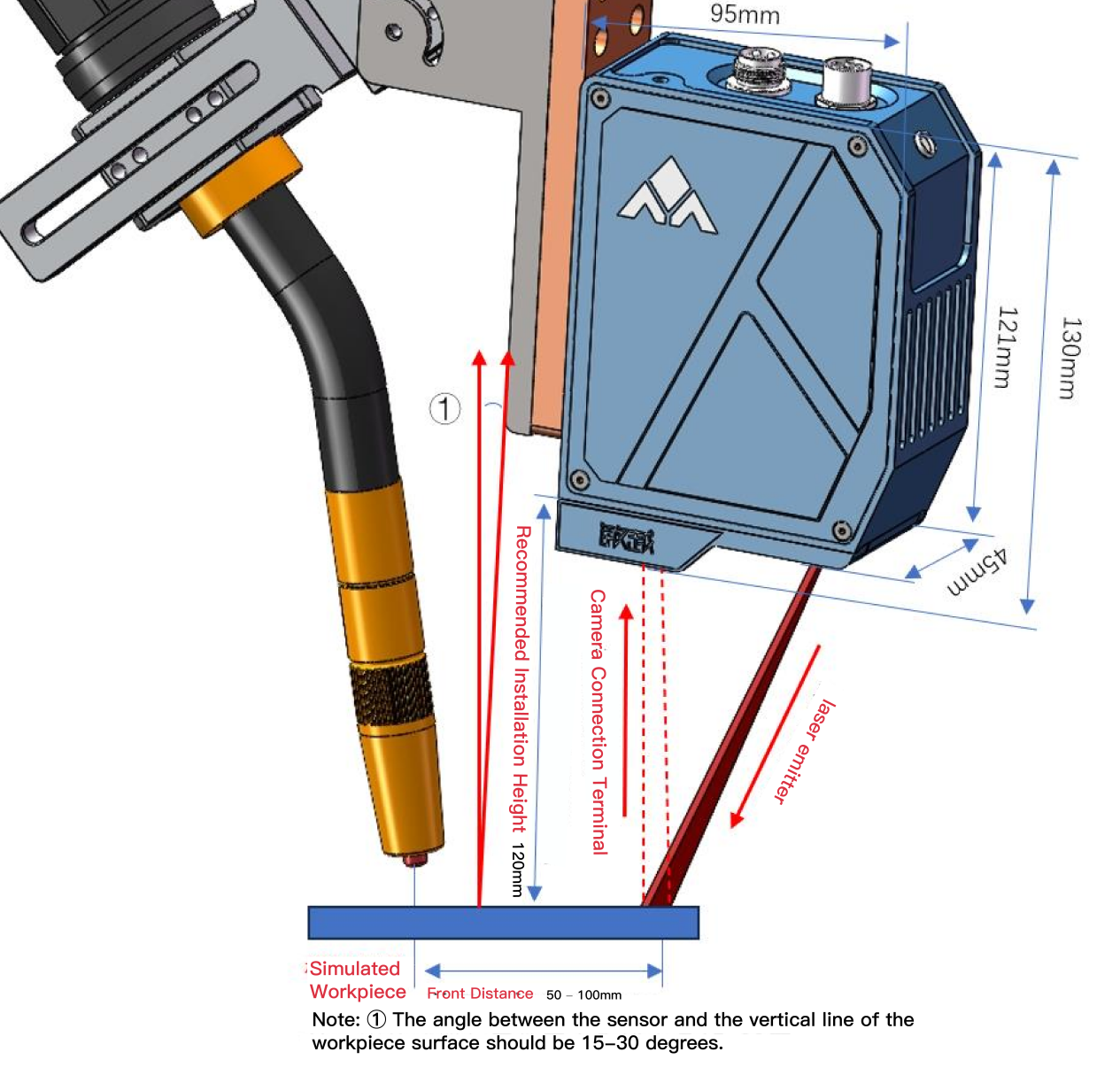
Optimālā novērošanas attālums ir aptuveni 120 mm.
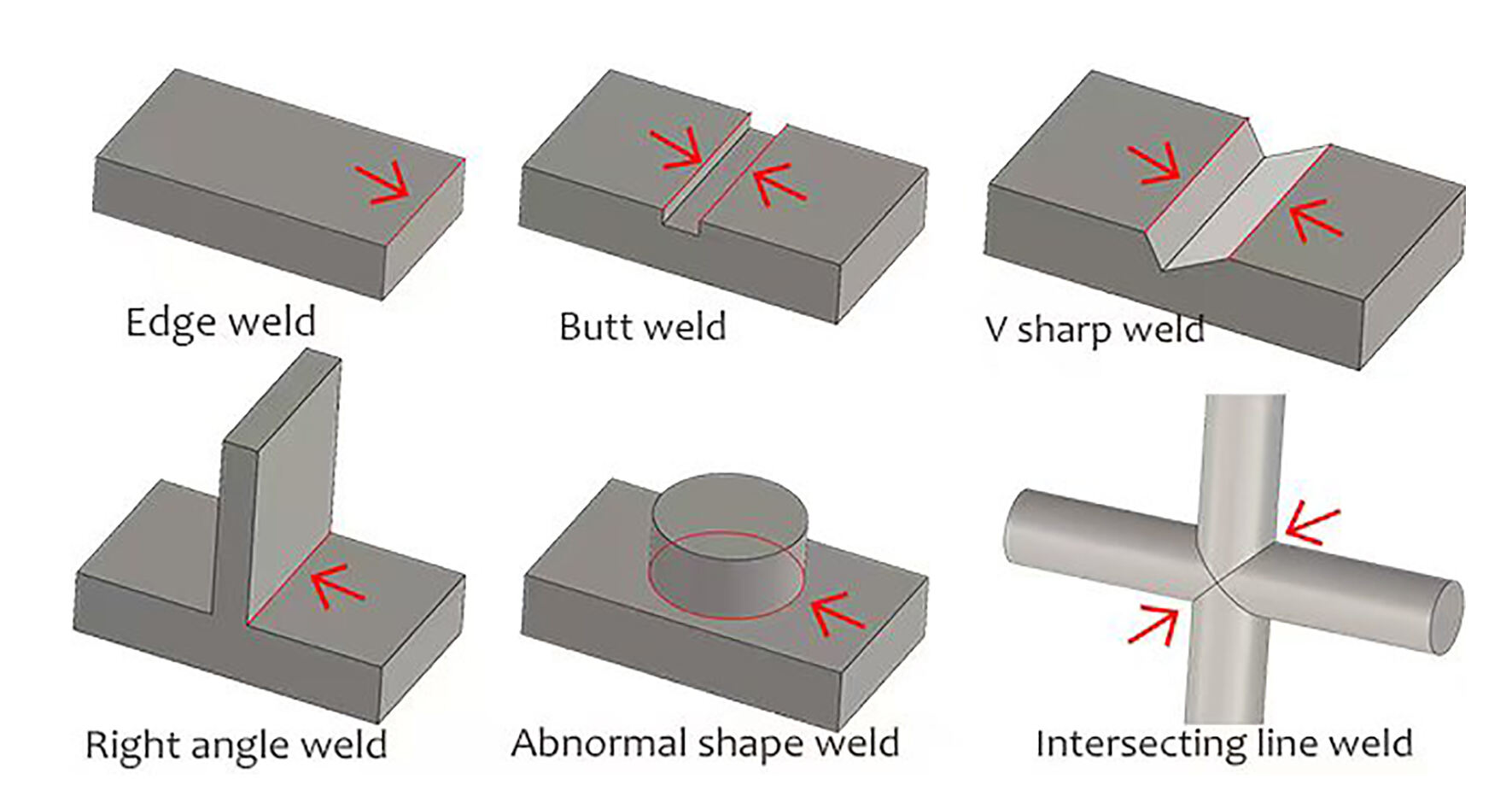
Atbalsta svars tipam
V-formas svārklājums
Klusā svārklājums
Svārstības svārklājums
Savienojuma svārklājums
Lielā apakšsvārstība utt.
Augsta precizitāte, nulles līmeņa svārstījumi. Piemērots nerīžu metālu svārstīšanai.
Ar zilu lasergaismu augstam atstarojumam un spožai vides apstākļiem. Īpaši dizināts alumīnija aliejumu lasera svars procesam.
Lūdzu, atlasiet tipu pamatojoties uz faktisko pielietojuma jomu, lai izvairītos no darbības gabala sadursmes ar senzoru, parasti robots krūtis ir nepieciešama aptuveni 20 kg.
Sadarbības partneris

Atbalsta robotu zīmolu







