Vai jūs jebkad esat domājuši par to, kā dažādas lietas, ko redzam un izmantojam ik dienu, tiek izgatavotas? No krāsainiem spēļu lietām līdz blīvajiem automobiļiem, viskas apkārt mums tiek izstrādāts speciālā vietā, kas saucama par fabriku. Katru dienu šajās fabrikās ir mašīnas, kas neziņā sasaista daļu pēc daļas, lai izveidotu produktus, kuros mēs tik smagi atbalstāmies. Bet kā šīm mašīnām zināms precīzi, ko darīt? Šeit nāk klajā rīkdabas lasersensory! Vēl viens būtisks elements ir rīkdabas lasersensory; tie ir mašīnu acis uz fabriku. Tie redz ļoti skaidri ar noteiktu veidu gaismas, kas pazīstama kā lasers. Kad mēs tos izmantojam MINYUE automatizēta robotu svārka , mūsu mašīnas var mērīt attālumus, aptvert lietas un nodrošināt, ka viss ir novietots tā, kā tas jābūt. Kad šāda informācija ir pieejama mašīnām, to var izmantot, lai ātrāk un precīzāk strādātu, kas rezultātā nodrošina gludu ražošanas procesa darbību bez jebkādiem traucējumiem.
Rūpniecības lasersensory ir ļāvuši fabrikām sasniegt ļoti augstas precizitātes un precizitātes līmeņus. Bet tie rūpniecisks svārku robots sensors from MINYUE spēj uzzināt pat vismazākās izmaiņas, lai viss notiktu pēc plāna. Tas ne tikai veicina kvalitātes produktu radīšanu, bet arī taupīti laiku un naudu, izvairoties no kļūdām. Viss ir paveikts labi! Tas pārprāvo globālās fabrikas ar rūpnieciskajām lasersensu tehnoloģijām. Šie sensori ir pietiekami gudri, lai starp mašīnām pārrakstītu zināšanas ar brīnišķīgu ātrumu, citiem vārdiem sakot, nodot informāciju tūlīt. Tas ļauj visam darboties efektīvi un minimizē neproduktīvu laiku, kad mašīnas nedarbojas. Šī brīnišķīgā tehnoloģija ļauj fabrikām ražot vairāk produktu īsākā laikā, sniedzot tai konkurences priekšrocības uzņēmuma nozarē pret citiem.
Kvalitātes kontrole ir būtisks aspekts, lai nodrošinātu, ka produkti atbilst noteiktajiem standartiem, pirms tie sasniedz klientus. Tas ir līdzīgi tam, kā pārbauda savu mājasdarbu, pirms to iesniedz skolotājam. Jums jānodrošina, ka tas ir precīzi! robotu lasersvaidzināšanas mašīna skeneri no MINYUE tiek izmantoti ne tikai precēm skenēšanai, bet arī kvalitātes kontrolei rūpniecības nozarē, pārbaudot katru mazu aspektu, kad tiek izgatavots produkts.
MINYUE intelektuālais lasersvaidīšanas automatizācija spēj noteikt jebkādas iespējamās kļūdas vai defekta ražošanas procesā. Izmantojot šos senzorus, fabrikas var atklāt problēmas agrīnā stadijā un tikt tās risināt, pirms tās kļūst par nopietniem jautājumiem. Tas dienās ne tikai tam, lai nodrošinātu, ka preces ir augstākās kvalitātes, bet arī veido uzticību lietotājiem, kas vēlas labākās produktus.
Svarīgākā aspekta jebkurai darbvietai ir drošība. Kad runa ir par fabrikām, kur desmitiem miljoniem sieviešu un vīriešu strādā kopā ar lielām mašīnām un robotiem, ir obligāti jānodrošina, lai visi cilvēki būtu droši 100% laika. Rūpnieciskie lasersenzori ir būtiski, lai monitorētu to, kas notiek fabrikā, uzstājot efektivitāti, bet vienlaikus prioritizējot drošību.
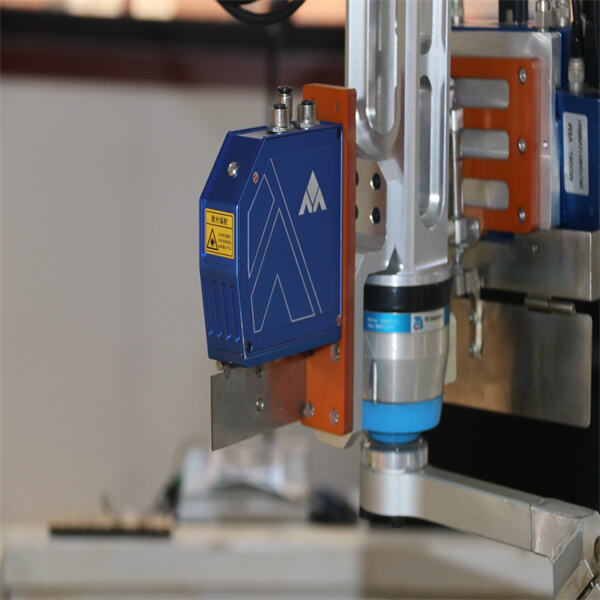
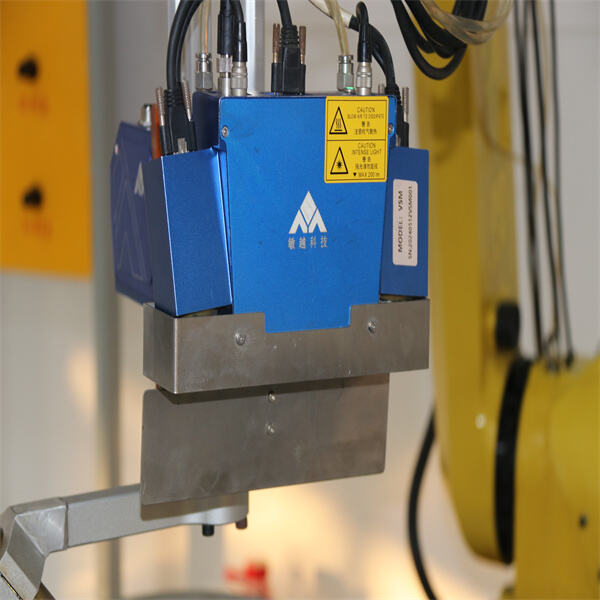
Beijing Minyue Technology Co.,LTD, kā pasaules vadošā augsttehnoloģiju uzņēmuma robotiku neatmiņošajā intelektuālā lietojumprogrammu jomā. Mēs specializējamies elastīgā intelektuālā ražošanā, izmantojot mūsu pašu izstrādāto RobotSmart - Intelektuālo Lēmumu Sistēmu, SmartVision - Divu Acu Strukturālā Gaismas Redzamības Sistēmu un SmartEye - Lazerredzamā Jostu Sekojanas Sistēmu. Mēs piedāvājam jaunu paaudzi intelektuālu robotu svārkošanas un griešanas risinājumu.
Ātri, precīzi, pilnīgi Bez-Programmēšanas, ar augstu efektivitāti un precizitāti. Tas risina tradicionālo robotu sarežģīto apmācības procesu un saglabā apmācības procesa pārtraukumu.
Sniedz spēcīgus svārkošanas robotus ar priekšielādi, malas ielādi, apgrieztu ielādi, jumta montāžu, intelektuālu trajectoru plānošanu vairākiem robotiem, vairākiem ārējiem ass un pozicionētāju sadarbību. Sasniedz robotu kustības simulāciju, satiksmes noteikumu pārkāpumu noteikšanu, vienības izvairīšanos un ass robežu noteikšanu.
Pieņemot funkciju meklēšanai un uzsekošanai, skenējot svārku līnijas, apstiprinot svārku līnijas pozīciju un informāciju, koregujot svārku līnijas pozīciju starp 3D digitālo modeli un faktisko darbību, risinot problēmu ar novirzi, kas radusies materiālu kļūdu un termiskās deformācijas dēļ.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








