Გამარჯობა, ბავშვებო! და, დღეს ჩვენ ვალვებით განვითარებული რობოტული ლაზერული ჭრა სენსორები. ეს არის ძალიან გამართლებული იнструმენტები, რომლებიც ხალხი გამოიყენება ყველა შესაძლო გზით, რათა დამართლოს, რომ ჩვენი მსოფლიო აمانია და მუშაობს საუკეთესოდ შესაძლოდ. ისინი არიან საჭირო რაოდენობაში სფეროებში და საშუალებას იძლევა საშიში ქმედებებს. ამიტომ, ვერ წარმოდგინებით დავიწყოთ ყველაფერის გამოკვლა, რაც გჭირდება გეგონას გარკვეული მანძილის ლაზრის სენსორებზე.
Ჩვენ ცხოვრებით ბევრ გარკვეული მანძილის ლაზრის სენსორის კარგი მხარეებით, რისგან ჩვენ გამოვიყენებთ ყოველდღიურ ცხოვრებაში. ერთ-ერთი უდიდესი რამე ამ სენსორების შესახებ არის იმის მიხედვით, რომ ჩვენ შეგვიძლია მოვიღოთ მონაცემები გარკვეულ მანძილზე, არ შემოწმებული საზომე საშუალების სამით. ის მოგვაწოდებს უსაფრთხოებას, მაგრამ მუშაობს საღარეთ მნიშვნელოვანი ინფორმაციით.” ისინი უწოდებიან სენსორებს, და მაგალითად, მეცნიერებმა შეძლებენ შესწავლა რაიმე ნაწილები ან ადგილები სივრცეში, არა იყოს ძალიან ახლოს!
Და მეორე ძალიან დიდი საინტერესო იქნება იმის მიხედვით, რომ დიდ დიაპაზონის ლეიზერის სენსორი ძალიან ზუსტია. ისეთია, რომ ჩვენ შეგვიძლია მოვამზადოთ ინფორმაცია, რომელსაც მათ მიეცემა, როგორც ფაქტურად სწორი და საკმარისად დამადგენლი. მიუხედავად იმისა, რომ ჩვენ გვინდა გამოვითვალოთ, რამდენად მაღალია სახლის მოკლე მანძილზე, ან შევამოწმებთ, როგორია ადგილის ცვლილების სიჩქარე, ჩვენ ყოველთვის შეგვიძლია მოვამზადოთ ეს სენსორები სწორი პასუხი. ეს კი კიდევ უფრო მნიშვნელოვანია სამუშაოებში, სადაც ადამიანთა საfty დამოკიდებულია ზუსტობაზე
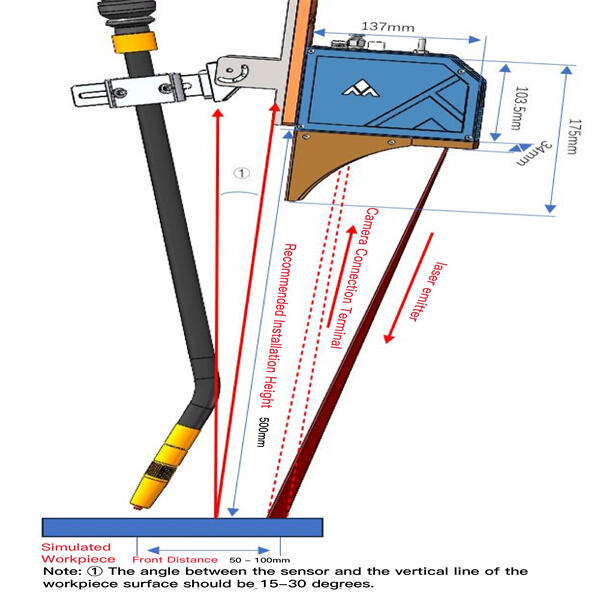
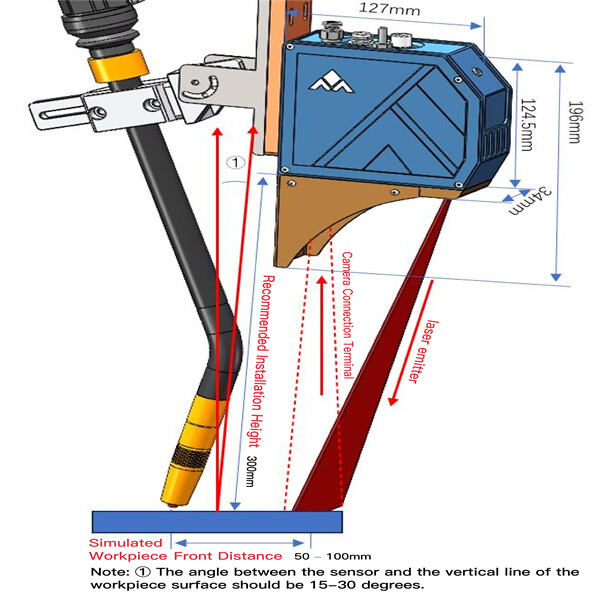
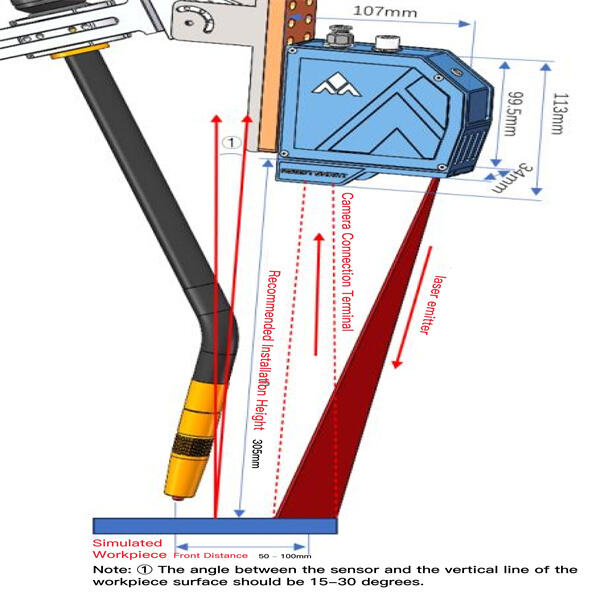
Ახლა განვიხილოთ, როგორ მუშაობს ეს დამარავი დისტანციის ლაზერული სენსორები. ისინი გამოყენებენ გადარეფრაქტებულ სინათლეს დისტანციის ზომვად და ადგილმდებარეობის განსაზღვრად. სენსორი გამოგზავნის ლაზერულ სინათლს, რომელიც ჩატრიკავს ადგილმდებარეობაზე და დაბრუნდება სენსორში. დისტანციის განსაზღვრად გამოიყენება ლაზერის წარმოქმნის დრო, რათა განსაზღვროს ადგილმდებარეობის მიერ მდებარეობა. ეს პროცესი ძალ gaussian და საშუალებას აძლევს ინფორმაციის მიღებას სწრაფად!
Ბევრ შემთხვევაში, დიდი დისტანციის ლაზერული ტრეკერი სენსორები შეიძლება დაგვეხმარონ რამდენიმე პროცესის გაუმჯობეს და უფრო უსაფრთხოდ განხორციელებისთვის. მაგალითად, ფაბრიკებში ეს სენსორები აძლევენ რობოტებს შესაძლებლობას შეამოწმონ, არის თუ არა რაიმე მათ გზაზე, რათა არ ჩამორთონ კოლიზია. ეს ვერსია რობოტებისა უზრუნველყოფს მათ უსაფრთხო მოქმედებას, რაც უზრუნველყოფს ფაბრიკის სწორ მუშაობას, პრობლემების გარეშე. როდესაც ყველა არის მარტივად და კარგად, ეს უზრუნველყოფს ყველას შემოწმების გარეშე.
Განვითარებული ლაზრის სენსორები ასისტირებია თვითმფრინავი მანქანებისთვის. ეს მანქანები დამოკიდებულია შესაბამის სენსორებზე, რომლებიც „ხედავენ“ მისი გარშემოსახარშემო გარემოს და უზრუნველყოფენ მანქანის გარეშე ჩამორჩენის არაშესაძლო გარემოს. ისინი შეგიძლია იdentifikiroeb სხვა მანქანების სენსორებს, პედესტრიანებს და ნახევარ ნიშნებს. ძირითადად, ტექნოლოგია უზრუნველყოფს გზებს უფრო უსაფრთხო ყველასთვის, მათ შორის ხожვასა და ველოსიპედის მფრინავებს, და ეს ყველაფერი შეგიძლია გამოიწვიოს განვითარებული ლაზრის სენსორების გამო.
Განვითარებული ლაზრის სენსორები გამოიყენება საშენო ინდუსტრიაში მიწის სიღრმის ზომის და სტრუქტურის წრფივობისა და ალიგნირების დადებით. ეს უზრუნველყოფს მუშაობებს შემოწმდეს ყველაფერი არის სწორედ იმაზე, სადაც უნდა იყოს, და არის საფრთხეების მიერ შესაბამისი. EHS-ის განხორციელება იქნებოდა ბევრი მეტი რთული და დროს მოწინავი გარეშე ამ სენსორების. ისინი უზრუნველყოფს საშენო მუშაობებს მუშაობის გაკეთებას ინტელექტუალურად და სწრაფად.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



