Ჱნავქ ლთ ჱა ლვჟერთრვ რჲბოთრვ ჱა ჟლვეზთრვლთრვ? ეს არის სპეციალური მანქანები რომლებიც საოცარ სამუშაოს ასრულებენ ძალიან ძლიერი ლაზერებით რომ ერთმანეთში შეაერთონ ლითონის ნაწილები. ალბათ ლაზერული შედუღების რობოტების ერთ-ერთი ყველაზე საოცარი თვისებაა, რომ მათ ეს შეუძლიათ დამატებითი მასალების ან შედუღების გარეშე. ამის გამო, ისინი ძალიან ეფექტურები და ფასდაუდებელია. ყოველი ამოცანა, იქნება ეს ავტომობილების ნაწილების შედუღება, ხიდების დამზადება, ღირს ნახშირბადის ფოლადის დამზადება, ან ღირს ლამაზი ყელსაბამების დამზადება. თუ რაღაცას მოითხოვს შედუღება, შეგიძლიათ დადოთ ფსონი, რომ ლაზერული შედუღების რობოტი ამას გაცილებით სწრაფად და უკეთესად გააკეთებს, ვიდრე ადამიანი.
MINYUE-ის ძირითადი კომპონენტები რობოტული სველის ავტომატიზაცია Ისინი შედგება ორი ნაწილისგან. პირველი ნაწილი თავად ლაზერია. ის ქმნის პატარა, მაგრამ უაღრესად ძლიერ სინათლის სხივს, რომელიც საკმარისად ძლიერია მეტალის დასაფლავებლად. რჲგა ვ კაკჲ ჟვ ოპაგგა ჟოლვზნა! თმაქ ჟპვერა გ ჟსჟრჲმარა. ეს სარკე ძალიან მნიშვნელოვანია, რადგან მას შეუძლია ლაზერის სხივის ზუსტად სწორი შაბლონით ასახვა, რათა თავისი საქმე შეასრულოს. თ თმა რობოტთკარა. ეს მკლავი არის ის, რაც ლეიზერს უხელმძღვანელებს, რათა უზრუნველყოს, რომ იგი ერთმანეთს შედუღებს მეტალის ნაწილებს ზუსტ წერტილში, სადაც ისინი უნდა დაიდუღონ. ეს კომპონენტების კომბინაციაა ის, რაც ლაზერული შედუღების რობოტს ამდენად ეფექტურ შედუღების მოწყობილობად აქცევს.
Ა აჱ მთნუე რობოტული პლაზმური დაჭრივა საკმარისად განსაზღვრულია, რადგან ისინი შეძლებენ მეტალს ძალიან მცირე მაჩვენებელით წყარობას. ეს ნიშნავს, რომ ისინი შექმნიennent საჭირო ძალად და მრავალფეროვანად ვარიაციების წყარობები, ვიდრე ის, რომლებიც ადამიანებმა შექმნიან. მექანიკური წყარობის რობოტების მეორე პროფესიული მხარეა ის, რომ ისინი არ გახდებიან უკეთესი ან საჭიროები განაპირობების გარეშე. ისინი შეგიძლია მრავალი საათი განადგურებინა განადგურების გარეშე. ეს ბევრი ფაქტორია ფაბრიკებში და პროდუქციის ხაზებზე, სადაც პროდუქტები უნდა შექმნიან სწრაფად და ზუსტად. მექანიკური წყარობის რობოტების გამოყენებით, მექანიკური წყარობის რობოტი შეძლებს შექმნა მეტი პროდუქტი ნაკლები დროში, რაც დახმარება კომპანიებს მისი მიზნების შესრულებაში და კლიენტების სატისფაციო.

Მოდის გამოვლეთ რამდენიმე საკინო სურვილი როგორც ლაზერული საკერძო რობოტები შესაბამისი ინდუსტრიების გარეშე ჩაწერა. მაგალითად, უკვე მეცნიერები შეძლებენ განსხვავებული ლაზერების გამოყენებას მრავალ მეტალურგიული ტიპების შეკერძელად. და ეს შეიძლება იყოს თამაშის შეცვლა ბევრი ბიზნესისა და ინდუსტრიებისთვის. და არ არის მხოლოდ განხილვა ლაზერული საკერძო რობოტების გამოყენების სავარაუდო სფეროში! მოიფიქრეთ, რამდენად სასარგებლო შეიძლება იყოს მათ სავარაუდო სამშენებლო სამუშაოში ან მთვარესთან დაკავშირებული საფუძვლების შესაქმნელად მთვარეზე. ასეთი ტექნოლოგია შეიძლება გახსნას გზა სხვა პლანეტებზე და თეთრი თეთრებზე გამოკვეთისა და სამშენებლო პროექტებისთვის.
Თუ თქვენ ხართ ბიზნესის მფლობელი, რომელიც განთავსებს საკერძო სერვისებს, ინვესტიციები MINYUE-ში ავტომატური საკერძო რობოტი არის დიდ ინვესტიცია. გარდა იმისა, რომ შე诸თ უფრო კარგ ხარისხის პროდუქტების წარმოება მеньობით დროში, ის ასევე შეიძლება გახსნას ახალი შანსები ინდუსტრიებში, სადაც ლაზრის საკერძო კავშირი ხდება ყველაზე მეტად გავრცელებული. და, როდესაც ლაზრის საკერძო რობოტი ასრულებს სამუშაოს, თქვენი ადამიანური საკერძოები შეძლებენ გაათავსონ თავი სხვა სამუშაოებზე, რომლებშიც ჭირდება ადამიანის შემთხვევა. ანუ, თქვენ მიიღებთ მოდერნული ტექნოლოგიის შედეგებს, არ დააკარგებით თქვენი მუშაობელების უნარებს.
Пекинს Minyue Техნოლოგია Co., LTD, როგორც მსოფლიო მიერ მובילი სამეცნიერო კომპანია ინდუსტრიული რობოტების გარემოში განათლების გარეშე ინტელექტუალური აპლიკაციები. ჩვენ განხილული ვართ წყვეტილი ინტელექტუალური შემუშავება ჩვენს თვით-განვითარებული RobotSmart - ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision - ბინოკულარული სტრუქტურული სინათლე ვიზუალური სისტემა, და SmartEye - ლაზერული ვიზიუალური შემდეგი სისტემა. გთავაზობთ ახალი გენერაციის ინტელექტუალური რობოტული საკერძო და დაჭრივი ამოხსნები.
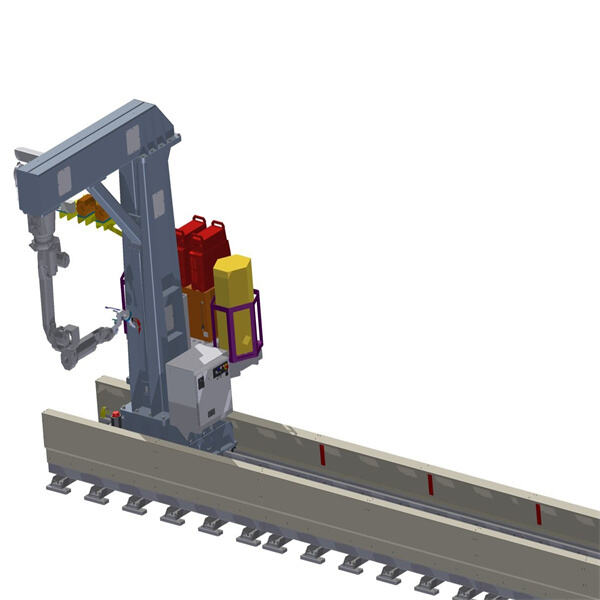
Გამოყენებით ფუნქციების ძებნასა და გადამოძრაობას, სკანირება სველის კრავის, დადასტურებს კრავის ადგილმდებარეობასა და ინფორმაციას, განახლებს სველის ადგილმდებარეობას 3D ციფრული მოდელის და რეალური ნაწილის შორის, ამოხსნის პრობლემას სველის გადახრის გამო შესაბამისი მასალების შეცდომებისა და თერმული დეფორმაციის გამო.
Გთავაზობთ ძალიან სიმძლავრი საკერძო რობოტის წინა ჩატვირთვა, გვერდიდან ჩატვირთვა, შებრუნებული ჩატვირთვა, განრიგი მაუნტინგი, ინტელექტუალური ტრაექტორიის გეგმა რამდენიმე რობოტისთვის, რამდენიმე გარე ღერძებისთვის და პოზიციონერისთვის საერთო მუშაობისთვის. რეალიზებს რობოტის მოძრაობის სიმულაციას, კოლიზიის გამოკვლევას, ერთობლივობის გარეშე და ღერძის ზღვარის გამოკვლევას.
Სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და ზუსტება. ის ამოხსნის تقليს რობოტების სირთულეად სწრაფ პროცესს და შენახავს სწრაფი პროცესის ჩათვლის დრო.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









