EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


プログラムなしインテリジェントロボット溶接ステーション
“北京民悦科技有限公司 ”中国を代表するハイテク企業として、 非- 教えること 産業用ロボットの知能化 。自社開発のRobotSmart-インテリジェント意思決定システム、SmartVision-二眼構造光ビジョンシステム、SmartEye-レーザー継ぎ目追跡システムに焦点を当て、次世代の教示不要のインテリジェントロボット溶接・切断ソリューションを提供します。
当社の 同社には、グラフィックスと自動化分野からの修士号・博士号を持つ技術専門家で構成される複合学科の研究開発チームがあります。その90%以上が修士号以上の学位を持っています。
ロボット制御、アルゴリズム、およびヒューマンロボットインタラクションに特化し、世界の製造業に優れたロボティクスの知能型ソリューションを提供することを目指しています。
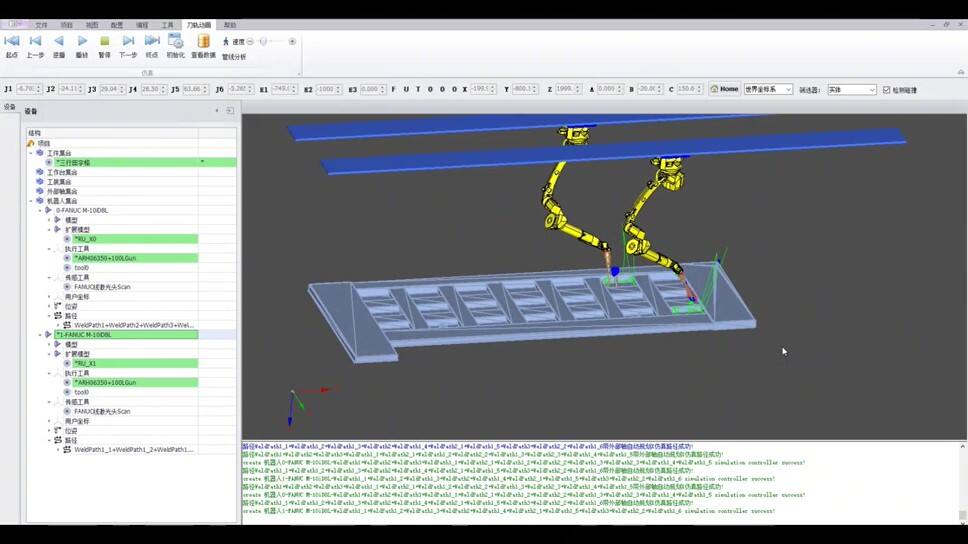
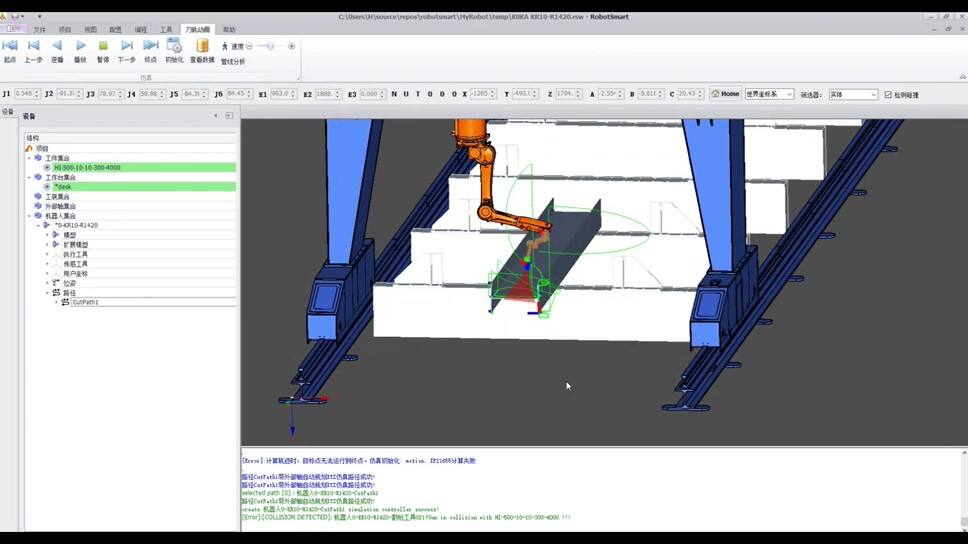
ユーザーが3DワークピースモデルをRobotSmart - インテリジェント意思決定システムにインポートすると、ソフトウェアは迅速かつ自動的に産業用ロボットの動作コードを生成し、同時にロボットの動作シミュレーション、衝突検出、障害回避軌道計画、特異点回避、軸制限検出などの機能を実現でき、従来の複雑で非効率的な手動教育プログラミングプロセスを回避します。
新しい方向へ進み、業界の課題を解決する。
Coal機械工業油圧 サポート 溶接問題、産業アップグレードに影響
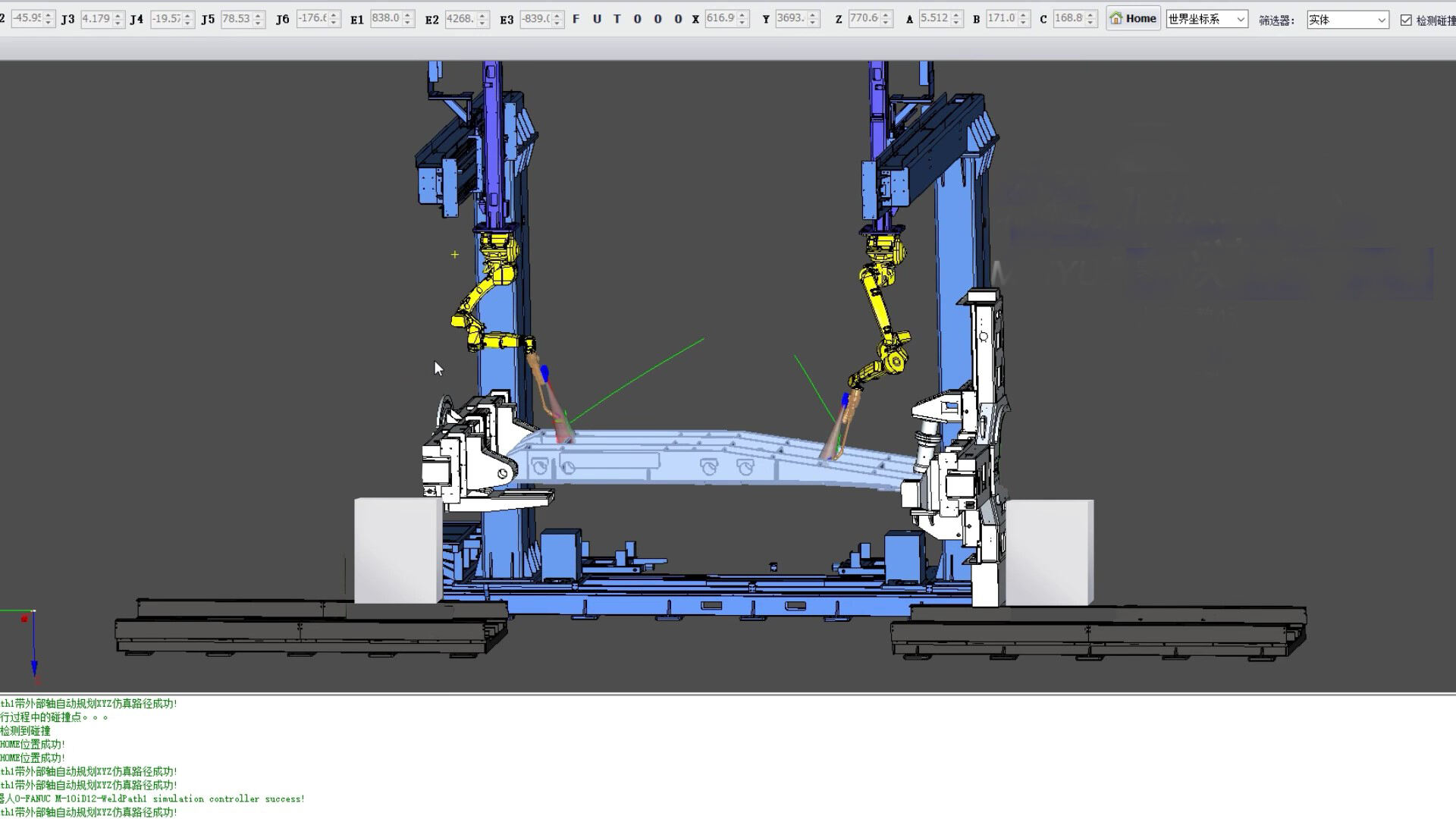
石炭機械工業で一般的に使用されている液圧支持の主要構造部品の重量は20トン以上になることがあります。これらの大半は中厚板から溶接された箱型の構造部品であり、液圧支持における重荷重と衝撃を受ける主要部分です。液圧支持は主に短い三次元交差溶接で構成されています。
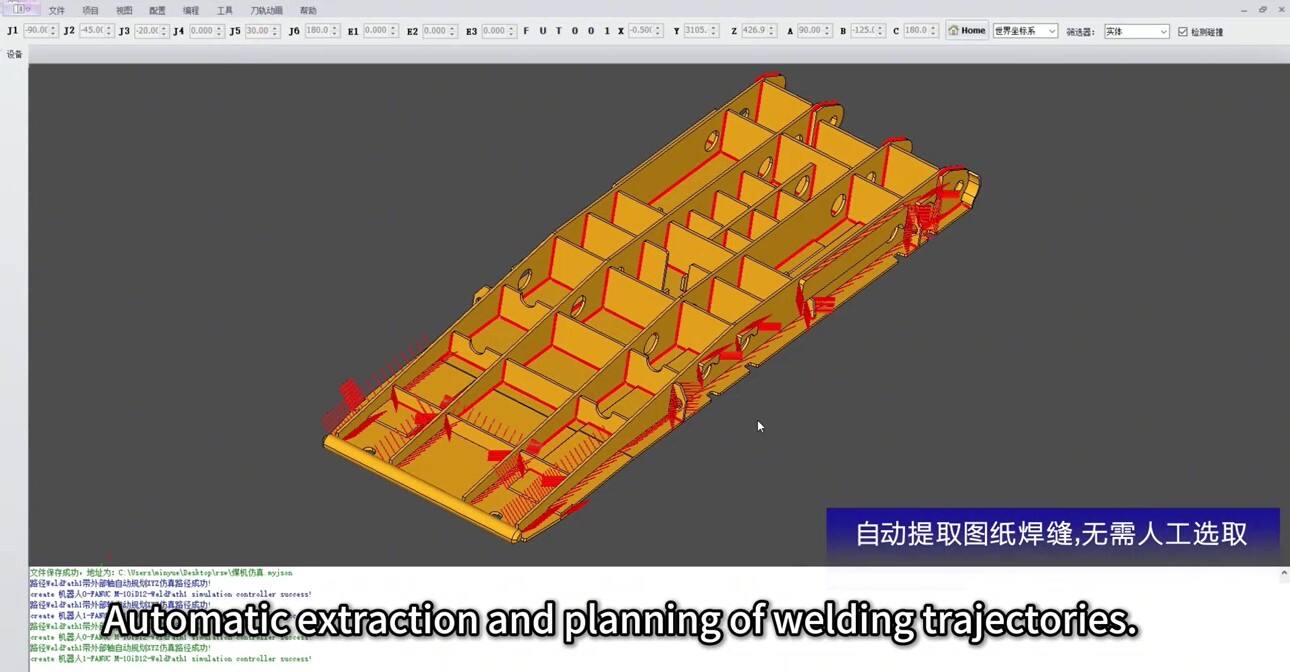
1,000以上の溶接 それらの多くは中厚板の多層多パス溶接であり、溶接継手は緻密で、溶接アクセスが困難であり、その溶接品質は直接作業面の安全な生産に影響します。
その構造の特殊性とプロセスの複雑さにより、手動溶接では溶接の安定性と溶接品質の一貫性を保証できません。
従来のロボット溶接を使用する。
- 教えること プログラミング、 r 停止時間が必要でロボットの稼働率が低い。
- 構造が複雑で、フレームの中にフレームがあり、サイズもさまざまで、1,000以上の溶接部がありますが、 必要 手動でプログラミングには5日かかります。 教えること 手動でプログラムするには5日かかります。
- ワークピースの位置決めと組み立て精度が要求を満たせないため、集中溶接による局所的な熱変形が原因で溶接ずれが発生します。
- 全体の油圧システムのロボット溶接自動化を実現するのは非常に困難です。 サポート 構造部品。
石炭機械業界のリーディングカンパニーで、闽越テクノロジーのワンボタンスタート、非教育型インテリジェント溶接ソリューションを採用しています。
ステップ1:弊社のお客様が3DワークピースモデルをRobotSmart - インテリジェントデシジョンシステムにインポートします。
ステップ2: RobotSmart - インテリジェントな意思決定システムで、産業用ロボットの軌道を迅速かつ自動的に生成でき、同時にロボットの動作シミュレーション、衝突検出、特異点回避、および軸制限検出を実現します。
ステップ 3: SmartVision - 3D二眼構造光ビジョンシステムがワークピースの粗位置決めを行います。3D二眼構造光ビジョンシステムはワークピース表面をスキャンし、点群データから逆モデリングを行い、モデリング精度内でワークピース表面の特徴を復元します。 ± 組立および初期位置決めのプロービング精度は40mm以内です。 ,組立角度を10 °以内で検出します。 溶接長さの変化を30mm以内(調整可能)で検出します 。
ステップ 4: SmartEye - レーザー視覚追跡システム。溶接継手をスキャンし、溶接継手の位置と情報を確認し、3Dデジタルモデルと実際の部品の溶接継手位置を補正し、実際の溶接継手位置データを取得します。複数のロボットや外部軸、および 位置付け器 協調作業をサポートします。
SmartVision-3D両眼構造光ビジョンシステムによる3Dモデルの取り込み ,取得した3D点群データを3Dデジタルモデルと比較します ,ロボットは3D点群データのある溶接部分のみを溶接します。センサーで取得した点群データが新しい部品を取り付けた後のワークピースの3Dモデルと一致した場合、取り付けられた部品を溶接します。
本当にワンボタンで生産を開始でき、2分でアーク開始が可能で、高速、正確、完全にプログラミング不要で、高効率かつ高精度です。
技術のリーダーシップで、業界から注目されています。