Բարև, երեխաներ: Քանի որ այսօր մենք կխոսենք երկար հաստատունի մասին ռոբոտական լազերային սահք սենսորներ: դա իրականում հետաքրքիր գործիքներ են, որոնք մարդիկ օգտագործում են բոլոր տեսակի ձևերով՝ մեր աշխարհի ամանունը և աշխատանքը ապահովելու համար։ Նրանք ենթադրական են տարբեր ոլորտներում, և նրանք կարող են կատարել անգամյան գործոնքներ։ Հետևաբար, ոչ շատ խոսքով, կարող ենք հետաքրքրվել ամեն ինչի, ինչ պետք է գիտեք երկար հաստատուն լազերային սենսորների մասին
Մենք живем с շատ լազերային սենսորի դեպքերով, որոնցից գործենք մեր օրագայում։ Սենսորների միջև մեծ բաններից մեկն այն է, որ մենք կարող ենք օգտագործել դրանք տվյալներ ստանալու համար երկար հեռավորություններից՝ չպետք է ունենալ կոնտակտ չափվող միջավայրի հետ։ Դա մեզ ապահովում է, իսկ միաժամանակ մեզ տալիս է արժեքավոր տեղեկատվություն։ Դրանք կոչվում են սենսորներ, և օրինակ, գիտնականները կարող են ուսումնասիրել որոշ մասեր կամ առարկաներ տարանից՝ չպետք է գերակայուն մոտ լինել!
Եվ մյուս մեծ գործոնը այն է, որ հեռավորակայության laser ճառագայթի սենսոր սենսորները իրականում ճշգրիտ են։ Սա նշանակում է, որ մենք կարող ենք վստահել նրանց տրամադրում ինֆորմացիային՝ որպես փաստացի և շատ վստահելի։ Արդյոք արդյոք մենք ուզում ենք չափել, թե որքան հեռավոր է պատերասը, թե ստուգել, թե որքան sür է շարժվում օբյեկտը, մենք միշտ կարող ենք վստահել այս սենսորներին՝ ճիշտ պատասխան տրամադրելու համար։ Սա դեռևս ավելի կարևոր է այն դեպքերում, երբ մարդկանց անվտանգությունը կախված է ճշգրտության վրա
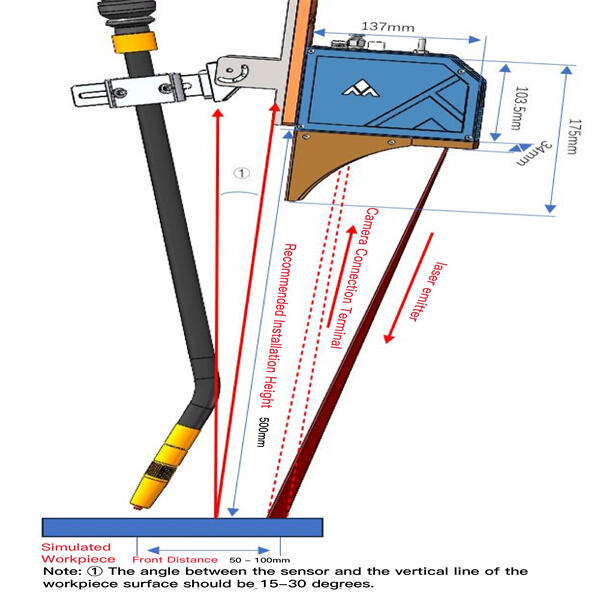
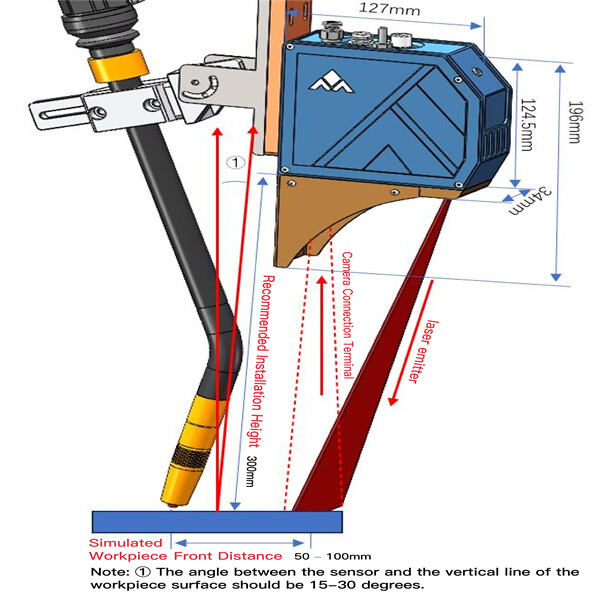
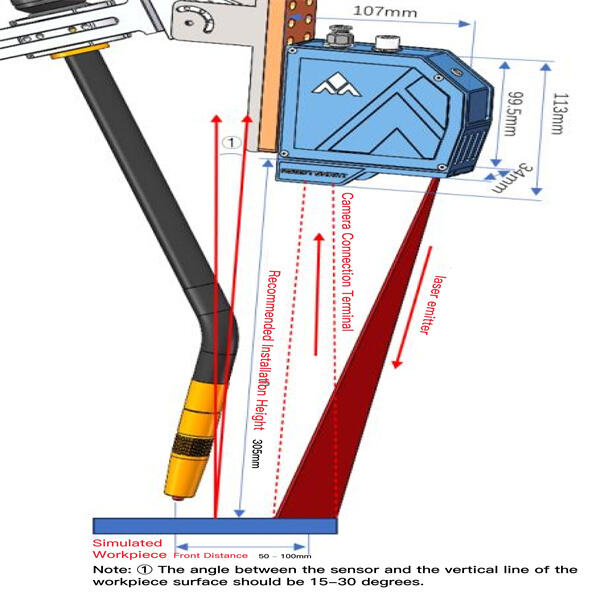
Հիմա ենթադրենք, թե ինչպես աշխատում են այս հավանական երկար հասցեի լազերային սենսորները: Նրանք օգտագործում են լուսաբացված լազերային ճառագայթներ հեռավորություններ չափելու և օբյեկտներ գտնելու համար: Սենսորը արձանագրում է լազերային ճառագայթը, որը վերադառնում է սենսորին օբյեկտից հետո: Լազերային ճառագայթի վերադառնալու ժամանակի չափումով՝ սենսորը կարող է որոշել օբյեկտի իրական հեռավորությունը: Դա շատ արագ գործընթաց է, որը օգնում է ստանալ տեղեկատվությունը ավելի արագ:
Բազմաթիվ դեպքերում, երկար հասցեի laser tracker սենսորները կարող են օգնել համոզել, որ ամենինքն ավելի հասարակ և ան전 աշխատում է: Օրինակ, գործարաններում այս սենսորները թույլ են տալիս ռոբոտներին տեսնել, որ որ ինչ կա իրենց ճանապարհում, որպեսզի հանգեցնեն հարթություններին: Այս տարբերակով ռոբոտները համոզվում են, որ նրանք անվտանգ են, ինչը թույլ է տալիս գործարանին անհատական և առանց խնդիրների աշխատել: Երբ ամենինքն աշխատում է համատեղ, դա ավելի հեշտ է բոլորի համար:
Երկար հաստատուն լազերային սենսորները նաև օգնում են ավտոմատ մաքսառող մաշիններին: Այդ մաքսառությունները կախված են ներդրված սենսորների վրա՝ շուրջը տեսնելու և համոզվելու, որ հանգում են պարանել բոլոր դիրքերը: Նրանք կարող են նաև ունենալ այլ մաքսառությունների, հատուկ սենսորների և mooieում տրանսպորտի նշանների ճանաչում: Կարևոր է, որ տեխնոլոգիան անվտանգություն է բերում մեր ճանապարհներին՝ բոլորի համար, ներառյալ այն մարդկանց, ովքեր քայլեցնում են կամ կինվում են bableին, և այն բոլորը շնորհավորվում է երկար հաստատուն լազերային սենսորներին:
Երկար հաստատուն լազերային սենսորները դառնում են օգտագործություններում կառուցումների բնագավառում՝ աշխատանքային բարձրություններ չափելու և կառուցվածքի ուղղության և համակցման հաստատությունը հաստատելու համար: Դրանք համոզում են ուղեցող աշխատողները՝ ստուգելու որ ամենին է նույն տեղում և համապատասխանում է անվտանգության պահանջներին: EHS-ն շատ ավելի բարդ և ժամանակատար կլիներ այդ սենսորների առկայության առաջին: Դրանք թույլ են տալիս կառուցուցիչներին ավելի մտահանգուն և արագ աշխատել:
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



