Դու գիտե՞ս մասին լազերային հաղորդման ռոբոտները: Նրանք հատուկ մաքնիններ են, որոնք կատարում են գեղեցիկ աշխատանք ապահովելով շատ ուժեղ լազերներ, որոնք միացնում են մետաղական մասնավորներ: Երկարությամբ ամենագեղեցիկ բաներից մեկը լազերային հաղորդման ռոբոտների մասին այն է, որ նրանք կարող են այն արել ավելին նյութերի կամ սոլդերի առաջացման առարկայից անկախ: Այդ պատճառով, նրանք շատ արդյունավետ են և արժեքով են: Յուրաքանչյուր Aufgaben, արդյոք այն մեքենաների մասնավորների հաղորդում է, սոլդերինգ carbon steel สะ մուտքագրել կամ գեղեցիկ կոլեր ստեղծել: Եթե ինչ-որ բան պետք է հաղորդվի, կարող ես համոզված լինել, որ լազերային հաղորդման ռոբոտն այն կարող է անել շատ արագ և լավ, քան մարդ:
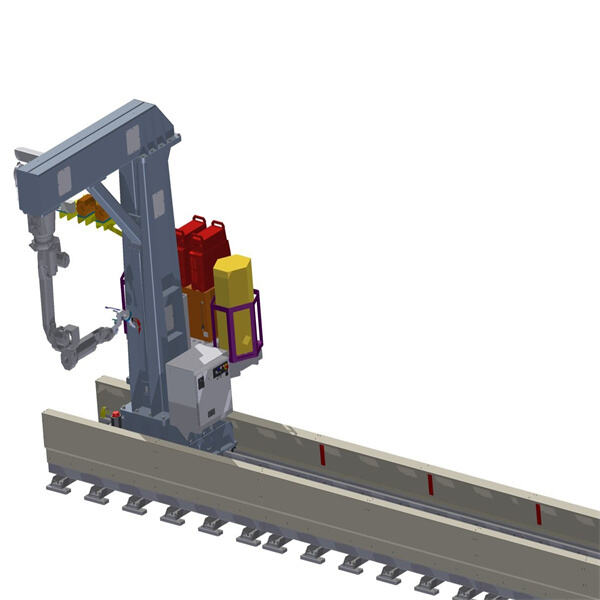
MINYUE-ի անհրաժեշտ կոմպոնենտները ռոբոտային 悍հոգնական ավտոմատացման Այնքան են կազմված երկու մասերից։ Առաջին մասը ինքնուրույն լազերն է։ Այն գեներ փոքր, բայց արդեն ամենահզոր լուսանկար, որը բավարար է մետաղը խորացնելու համար։ Այսպիսով, այսպիսով կատարվում է համարձակումը։ Լազերի համակարգում կա արևագույն։ Այս արևագույնը շատ կարևոր է, քանի որ կարող է վերացնել լազերի ճառագայթությունը ճշգրիտ օրինաչափով, որպեսզի կատարի իր աշխատանքը։ Եվ այնուհետև կա ռոբոտական ձեռք։ Այս ձեռքը ուղղում է լազերը՝ համոզված, որ այն համարձակում է մետաղային մասնիկները ճշգրիտ այն կետում, որտեղ պետք է միացնել։ Այս մասերի համատեղումը այն է, որ դա դարձնում է լազերային համարձակման ռոբոտին այնքան արդյունավետ համարձակման սարք։
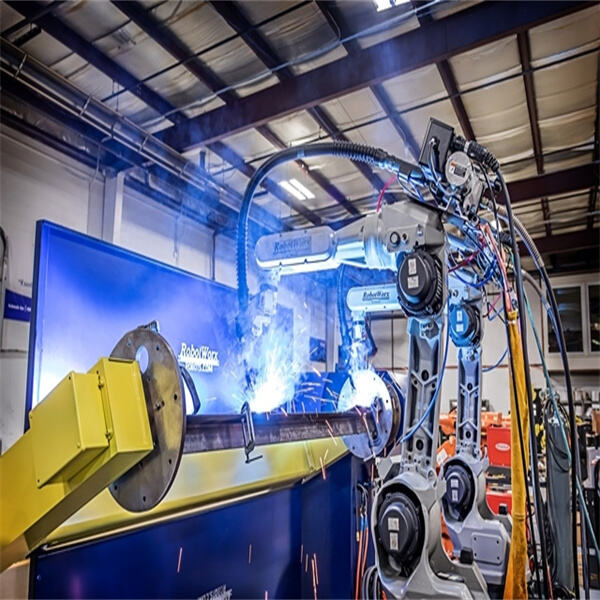
Եվ MINYUE robotic plasma cutting են շատ հետաքրքիր, քանի որ կարող են միացնել մետաղը շատ ճշգրիտ ձևով: Սա նշանակում է, որ դրանք ստեղծում են միացումներ, որոնք կարող են լինել շատ ուժեղ և տարբեր տեսակներով, քան այն, ինչ որ մարդկանց կարող են ստեղծել: Լазերային միացման ռոբոտների մեկ այլ առավելություն է, որ դրանք 決ում են և չեն պետք դադարումներ: Դրանք նաև կարող են շատ ժամ աշխատել, ոչ մի տեղ չունենալով դանդաղում: Այս բոլորը շատ կարևոր է գործարաններում և արտադրանքների շարունակության ժամանակ, որտեղ արտադրանքները պետք է արտադրվեն արագ և ճշգրիտ: Օգտագործելով լազերային միացման ռոբոտներ, կարող ենք արտադրել ավելի շատ արտադրանքներ պակաս ժամանակում, ինչը օգնում է ընկերություններին հասնելու իրենց թիմաներին և պահելու գործընկերներին elé.

Կարող ենք սպասել մի շարք ինովատիվ համակցման տեխնոլոգիաներ, քանի որ լազերային համակցման ռոբոտները դառնան տարբեր գործականությունների մասին: Օրինակ, արդեն հետազոտողները կարող են գտնել տարբեր օգտագործումներ լազերների համակցման ժամանակ տարբեր տեսակի մետաղների համար: Եվ սա կարող է դարձնել խաղադրակ շատ գործընկերությունների և գործականությունների համար: Դատարկության մեջ նույնիսկ խոսք է գործելու մասին լազերային համակցման ռոբոտների տեղադրման մասին: Արդյոք մտածեք, թե որքան օգտագործելի կարող են դարձնել դարակների կառուցման ժամանակ դատարկության սարքերում կամ անդամների համակցման ժամանակ Լուսնի մակերևույթի վրա: Այդպիսի տեխնոլոգիաները կարող են բացել ճանապարհ այլ 惑星ների և ամուսների հետ կապված հետազոտությունների և կառուցումների համար:
Եթե դուք գործընկերության 소유者 եք, որը ունի համակցման ծառայություններ, ապա արդյոք դիմացի դարձնեք MINYUE-ին ավտոմատ վարդակցման ռոբոտ համեմատյալ գումարն է: Ավելին, սկզբնապես թույլ է տալիս ավելի որակավ արտադրանքներ ստեղծել ցանկացած կոտորակում ժամանակի, այն նաև կարող է բացել նոր հնարավորություններ այն գործակալություններում, որտեղ լազերային համարձակումը դառնում է ավելի տարածված: Եվ, երբ լազերային համարձակող ռոբոտը կատարում է աշխատանքը, ձեր մարդկանց համարձակողները կարող են ծախսել իրենց ժամանակը այն աշխատանքների վրա, որոնք պետք է կատարեն մարդկանց հասարակությամբ: Դա նշանակում է, որ դուք ստանում եք ժամանակակից տեխնոլոգիայի արդյունքները՝ չունեցող ձեր աշխատողների մարդկանց ունակությունները չունեցող:
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









