Լազերային ստորագրումը անհանգստ գեղարվեստ տեխնոլոգիա է, որը թույլ է տալիս արագ և ճշգրիտ նյութերի ստորագրել, և ավտոմատացմամբ դա դեռևս լավին է! Սա նման է շատ ստորակենդ գործիքի օգտագործմանը, որպեսզի ճշգրիտ ստորագրեք ինչ-որ բան! Լազերային ստորագրումը գործընթաց է, որի մեջ օգտագործվում են ուժադուր լազերներ՝ տարբեր նյութերի, ինչպիսիք են մետաղ կամ պլաստմաս, ցանկացած ձևով ստորագրելու համար: Լազերային ճառագայթը գործում է որպես շատ ստորակենդ ստորագրման կոնվենիա: Դրա պատճառով MINYUE-ում մենք օգտագործում ենք այս բարձր ճշգրտությամբ գործիքները՝ շարժի դիտարկող լազեր ստորագրման գործընթացը և ավելի օպտիմալ դարձնելու համար!
Քանի որ ավտոմատացված լազերային համակարգերը կարող են սահքել նյութեր բարձր ճշգրտությամբ, այդպիսի համակարգեր ենթարկվում են գնահատության այս ոլորտում: Այսինքն, սահքվող օբյեկտների չափերը և ձևերը բավականին ճշգրիտ են և համապատասխան են: Ավտոմատացված լազերային համակարգերի օգտագործումը համոզեցնում է, որ դրանք կարող են կրկնելու և ճշգրտությամբ կատարել նույն սահքերը յուրաքանչյուր անգամ, ինչը կարևոր է: Երբ խոսքն է մաքնինային կամ էլեկտրոնային սարքերում օգտագործվող մասնակցերի մասին, օրինակ, կարևոր է, որ յուրաքանչյուր մաս ճշգրիտ համապատասխանի: Ավտոմատացված ժամանակավոր գործարանը համոզեցնում է, որ բոլոր մասնակցերը նույնն են, այնպես որ օգնում է սարքման գործընթացը ամենալավ ձևով կատարել:

Այնքան շատ հարաբերական գործադիր համառոտություններ կան MINYUE ավտոմատացված լազերային սահքման օգտագործմամբ մեր աշխատանքում: Ամենամեծ համառոտությունը, որը այն է տալիս, այն է, որ այն օգնում է նվազեցնել այն ժամանակի քանակը, որը կորցնում է: Ավտոմատացված համակարգերի դեպքում սահքման գործընթացը շատ արագ է համեմատաբար այն դեպքում, երբ այն կատարվում է ձեռքով: Սա ավելի հնարավոր է դարձնում օբյեկտ ստեղծելու փոքր ժամանակում, որը որոշակի օգնում է բանալի աշխատանքային պատահարում: Մեկ այլ հարաբերական գործադիր համառոտությունը ռոբոտային լազերային համարձակում այն է, որ այն կարող է սպասարկել լայն շարք նյութերի և հաստությունների: Այս համարձակությունը դարձնում է այն համապատասխան տարբեր գործարանների համար, սկսած արտադրությունից մինչև արվեստը:
Հետևաբար, սա կապված է համակարգիչների և մեքենաների օգտագործմամբ սահքման գործընթացի ավտոմատացման համար laser համեմատության լուծումներ . Դա նำում է կարևոր éliտելից և ավելի ճշգրիտ գործընթացին։ Այս MINYUE մեքենաները կարող են կատարել ճշգրիտ ձևափոխություններ — պետք է միայն ներմուծել ճշգրիտ սահմանափակումը, որը պետք է կատարվի, և դա կիրառվի պահանջվող ձևով։ Համոզվելով, որ գիծերը կարող են նաև հանգեցնել սխալներից խուսափումներին, դա դարձնում է այն ավելի արդյունավետ։ Երբ քայլ (քայլեր) կհաջողությամբ կգործարկվեն, մենք չի միայն կարող ենք տարածել բարձր որակի արտադրանքներ, այլ նաև համոզվել, որ տարածումը հաջողությամբ կկատարվի։
Ավտոմատացված համակարգերի սկզբնական արժեքը կարող է թվալ բարձր, բայց արդյունավետության և ճշգրտության միջոցով ստացվող խանգիտումները կարող են ավելի շատ ավելացնել։ Սա թույլ է տալիս մեզ ավելի շատ արտադրանքներ ստանալ պակաս ժամանակում՝ հանգեցնելով հանգույցի և սխալների հեռացմանը։ Այս արդյունավետությունը կարող է մեծ արժեքներ խանգեցնել նյութերի և աշխատավարձի հետ կապված արժեքներին, որը օգտագործող կամավորություն է ցանկացած կազմակերպության համար։
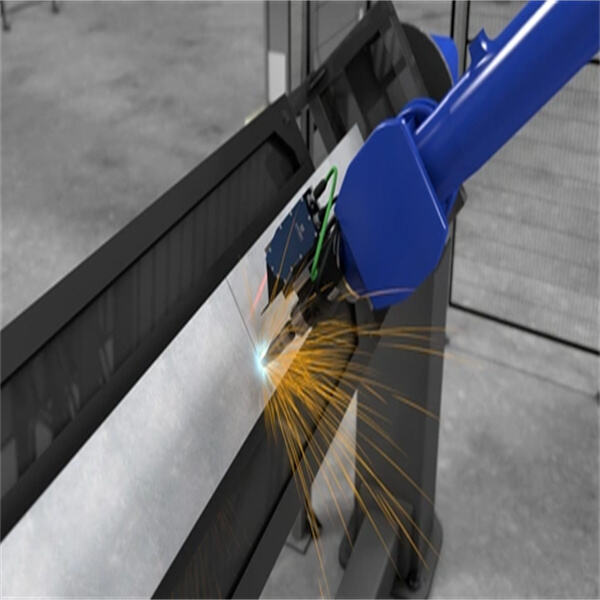
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








