 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Bodenrail-basierter intelligenter Schweißroboter-Arbeitsplatz für Stahlbau

Der Schienenroboter mit Bodenbefestigung ist mit einem intelligenten Friendess Non-Teching-Schweißsystem und einem großen visuellen Distanzrissverfolger ausgestattet. Er kann 3D-Modelldateien von Tekla, SolidWorks oder UG direkt importieren, die Schweißprozessparameter direkt zuordnen, die genaue Schweissposition automatisch identifizieren und den optimalsten Schweißprozess für das Schweissen generieren.
Die Schienenantriebsachse am Boden erhöht die Anpassungsfähigkeit in Längsrichtung. Der Roboter kann sich mit der Schiene verbinden, um längere Nähte auf einmal zu schweißen, und die Arbeitsstation kann auf beiden Seiten der Schiene arbeiten. Er wird hauptsächlich für das Schweißen von H-Profilrippplatten, Säulenfußplatten, Traegerunterstützungsplatten, Konsolen und anderen Strukturen verwendet.
| Roboter | 1 Satz Fanuc-Roboter |
| Optionale Schweißquelle | Aotai-Schweißmaschine und Zubehör oder Megmeet-Schweißmaschine und Zubehör |
| Schweißsystem | MINYUE beispielloses Offline-Programmierschweißsoftware und MINYUE Laservisionssystem zur Verfolgung. |
| Anwendbare Szenarien | Geeignet für Gusseisenplatten, Kragteile, kleine tragende Teile usw. Derzeit kann es in H-förmigen Hauptträgern und Sekundärträgern von Stahlkonstruktionen, kleinen und mittleren Platten-Einheiten von Schiffsbrücken, Ausrüstungsh-förmigen Stahlstützen, Ausrüstungsplattformträgern und anderen Strukturen verwendet werden. |
| Säuberungssystem für Waffen | SC220A Säuberungssystem für Waffen |
| Länge der Bodenschienen | 6 Meter (nach Bedarf des Benutzers optional) |
System zur Reinigung von Waffen
Die SC220A-Waffensäuberungsstation ist ein Gerät zur Reinigung von Roboter-Schweißwaffen. Es wird verwendet, um während des Roboterschweißvorgangs automatisch das Schweißschlacke der Schweißwaffe zu reinigen, Drähte automatisch abzuschneiden und die Schweißwaffen Düse sowie den Kontaktstift zu schützen, was die Lebensdauer der Schweißwaffe verlängert und Geld spart. Reduziert den Verbrauch an Konsumgütern, gewährleistet eine gute Schweißqualität und erhöht die Schweißeffizienz. Einfache Bedienung und Benutzerfreundlichkeit.
Vorteile von Schussreinigungsstationen: 1. Die Schussbereinigungszeit ist kurz und die Systemverfügbarkeit ist hoch. 2. Automatische Vervollständigung des Schussreinigungsprozesses ohne manuelle Operation. 3. Verhindert Qualitätsprobleme, die durch Verschmutzung während der Schweissung verursacht werden. 4. Mit Roboter-TCP-Kalibrierungsnadel ausgestattet.
Roboter-Schweißsoftware
Die Software kann automatisch Schweißnähte aus Zeichnungen extrahieren, ohne Schweißmarkierungen, reduziert damit die manuelle Arbeitsbelastung. Mit dem leistungsstarken 3D-Engine und Robotercontroller werden die automatisch erstellten Punkte simuliert und verifiziert, um Kollisionen in der tatsächlichen Arbeit zu vermeiden.
Und ohne Zeichnungstyp, 3D-Scan-Rückwärtsmodellierung, schnelle Erstellung von 3D-Zeichnungen, automatische Generierung von Roboter-Schweißtrajektorien, Optimierung der Schweißtrajektorie, Einstellvisualisierung, automatische Erkennung von Schweißfackelkollisionen.
LDWP-305 Lasertacker
LDWP-305 ist ein intelligenter Linienabtast-Schweißnaht-Sensor. Er erhält die Konturinformationen des Schweißnahtquerschnitts durch eine Linienlaserabtastung und führt den Roboter oder die Schweißmaschine zur automatischen Fertigstellung des Schweißvorgangs. Die Bildaufnahme, -verarbeitung und Schweißnahtidentifikation erfolgen innerhalb des Sensors, ohne dass ein externer Computer benötigt wird. Er hat eine hohe Integration und senkt die Gesamthardwarekosten des Systems. Widerstandsfähig gegen Bogenlicht und Spritzer, intelligent erkennt er Schweißnähte und ist einfach zu bedienen. Er hat eine präzise Struktur, kompakte Größe, hohe Zugänglichkeit und vielfältige Arten. Je nach Anwendungsszenario kann ausgewählt und verwendet werden, und die passenden Parameter können angepasst werden.

Vorteil
1. Unterstützung von nicht unterrichtsbasierten Verfahren für verschiedene Produkte wie Sandwichplatten, Tragwerksbalken, Halterungen, Brückenpartitionen und Plattenständen;
2. Es ist nicht nötig, Fügepunkte im Entwurfsstadium zu kennzeichnen, und die gewünschte Fügeposition kann automatisch durch das Importieren von 3D-Zeichnungen extrahiert werden;
3. Keine menschliche Intervention erforderlich, der Roboter führt automatisch Aktionen wie Nullpunkt-Rückkehr, Übergang, Positionssuche, Schweißen, Zählen und Düsenreinigung aus;
4. Keine vor-Ort-Bedienung notwendig, das Programm kann jederzeit und überall generiert werden und wird ferngesteuert zum Roboter gesendet, um gemäß der vorgegebenen Zeit mit der Produktion zu beginnen;
5. Selbstentwickltes Offline-Programmieren, 1:1-Simulation der Roboterbewegungen, vermeidet im Voraus Störungen und Kollisionen des Roboters;
6. Digitale Zwillingstechnologie kann in Echtzeit am Arbeitsplatz Informationen zur Roboter-Trajektorie, Schweißspannung, -strom, -geschwindigkeit und andere Produktionsdaten anzeigen.
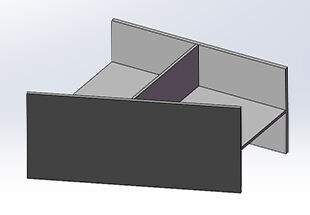
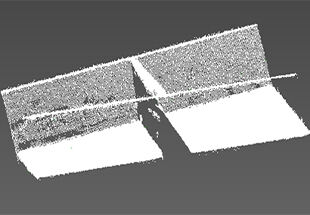
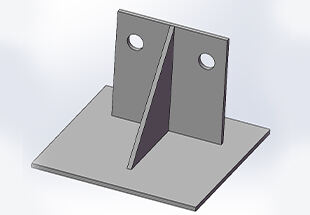
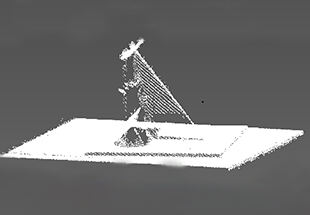
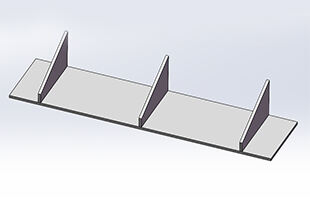
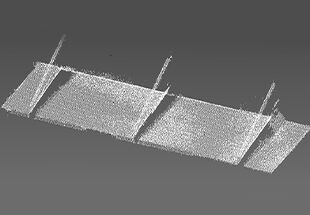
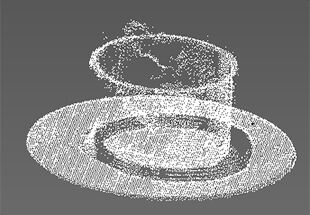
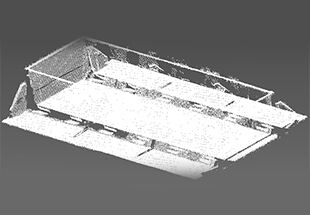
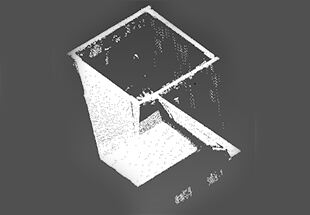
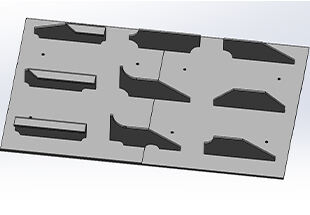
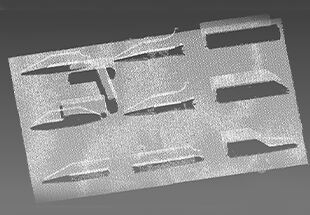
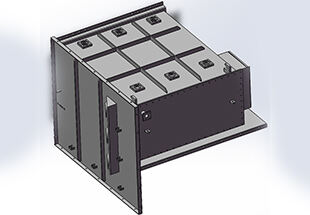
| Nein | Arbeitsstücktyp | Bild des Arbeitsstückmodells | Punktwolkenbild des Arbeitsstücks |
| 1 | H-Profil (Einschließlich Nahtverbindungen) | 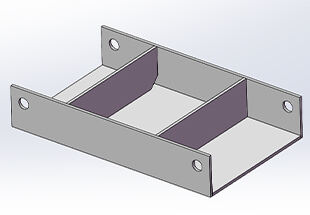 |
 |
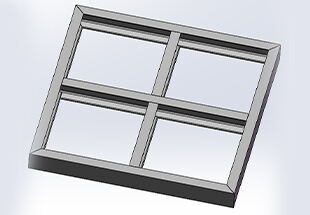
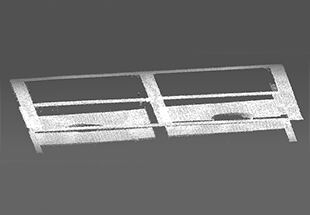
| 2 | Plattenbauteil |
 |
 |
| 3 | Stahlkonsol |
 |
 |
| 4 | Geschützturm-förmig |
 |
 |
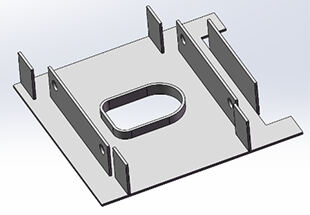
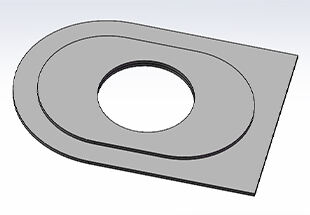
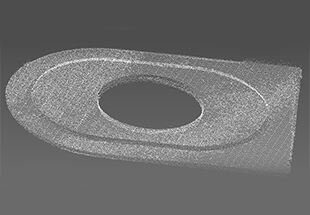
| 5 | Dachbalken-Unterlegscheibe |
 |
 |
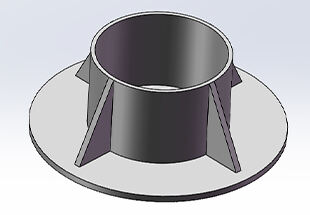
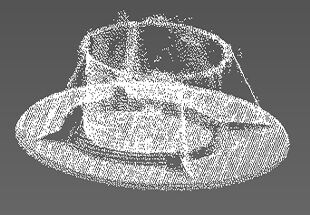
| 6 | Rundrohrbasis |
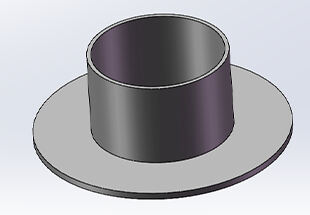 |
 |
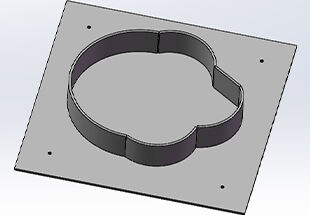
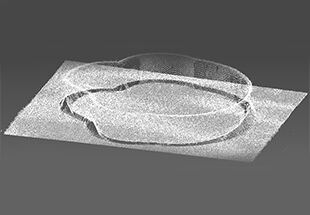
| 7 | Kreuzförmige Rundrohrbasis |
 |
 |
| 8 | Fremde Oberfläche |
 |
 |
| 9 | Doppelbeschichtete Platte |
 |
 |
| 10 | L-Profilschweißung |
 |
 |
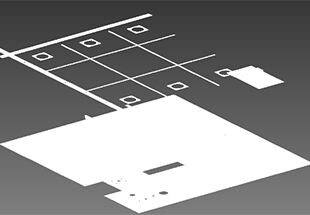
| 11 | Doppelschweißnaht | 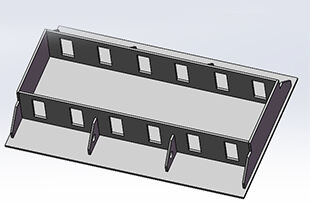 |
 |
| 12 | Kastengirder |
 |
 |
| 13 | Ungleichmäßiges Biege-Schweißen |
 |
 |
| 14 | Transformatorbehälter |
 |
 |





