Nghĩa là cảm biến rất quan trọng đối với robot AI chúng giống như đôi mắt và đôi tai của robot. Giống như mắt cho phép chúng ta nhìn thấy, tai cho phép chúng ta nghe, cảm biến cho phép robot nhìn và hiểu về môi trường xung quanh. Robot cũng có thể học hỏi về môi trường của mình thông qua các cảm biến khác nhau. Chúng có thể cảm nhận những thứ như chuyển động, âm thanh, chạm và thậm chí là khoảng cách đến một vật thể nào đó. Cảm biến là thiết yếu vì chúng cho phép robot di chuyển an toàn, đưa ra quyết định và tương tác với môi trường xung quanh.
Trong lĩnh vực robot, các cảm biến MINYUE tạo thành phần không thể thiếu trong hoạt động của robot và được sử dụng để thực hiện các nhiệm vụ đã cho. Các cảm biến cung cấp cho robot những thông tin thiết yếu mà chúng cần để hoàn thành công việc một cách chính xác và hiệu quả. Không có cảm biến, robot hầu như không thể nhận biết các vật thể trên đường đi, tránh va chạm và thậm chí là tuân theo chỉ dẫn từ con người. Cảm biến: Bạn có thể nghĩ đến cảm biến như là bộ não của robot vì chúng đóng vai trò quan trọng trong cách mà robot nhận thức môi trường xung quanh và phản ứng.
Cảm biến chạm: Cảm biến chạm cung cấp cho robot khả năng cảm nhận và tương tác với các vật thể trong môi trường xung quanh. Khi một robot gặp phải một vật thể, nó dựa vào cảm biến chạm để thông báo cho nó biết đã gặp phải gì, cho phép nó phản hồi phù hợp.
Robot tự động MINYUE là những robot có thể hoạt động độc lập mà không cần can thiệp của con người ở mức độ lớn. Sự hoạt động của những robot này dựa trên một số lượng lớn các cảm biến như cảm biến ánh sáng laser được sử dụng để quan sát môi trường xung quanh và hỗ trợ hoàn thành nhiệm vụ một cách tự động. Trước tiên, hãy cùng tìm hiểu qua một số thành phần quan trọng của robot tự động:
Chiếc các robot có trí tuệ nhân tạo tăng cường khả năng của chúng và thực hiện các nhiệm vụ hiệu quả hơn với việc sử dụng nhiều loại cảm biến khác nhau. Chỉ để lấy một ví dụ, cảm biến ánh sáng có thể giúp robot tìm kiếm ánh sáng và theo dõi nó. Điều này có nghĩa là nếu một nguồn sáng được bật lên, robot có thể tiến lại gần nó. Cảm biến thính giác: Robot có thể phản hồi các lệnh bằng giọng nói. Cảm biến âm thanh cho robot biết người đó đang nói gì khi họ nói.
Có các cảm biến chạm MINYUE và cảm biến laser điều này trao cho robot khả năng tương tác với các vật thể xung quanh. Ví dụ, nếu một robot chạm vào tường, cảm biến chạm sẽ báo cho robot ngừng di chuyển về phía trước. Đèn giao thông kiểm soát dòng xe trên đường. Chúng cũng có thể đo khoảng cách đến một vật thể, vì vậy robot có thể di chuyển an toàn mà không va chạm vào bất kỳ thứ gì.

Từ những điều trên, chúng ta có thể thấy rằng cảm biến là các thành phần quan trọng của công nghệ robot. Chúng cho phép robot cảm nhận và tiếp xúc với môi trường xung quanh. Hiểu về các loại cảm biến khác nhau và vai trò độc đáo của chúng trong bức tranh lớn hơn của công nghệ robot sẽ giúp chúng ta đánh giá cao sự đóng góp của những thành phần nhỏ bé này vào tương lai của công nghệ robot.
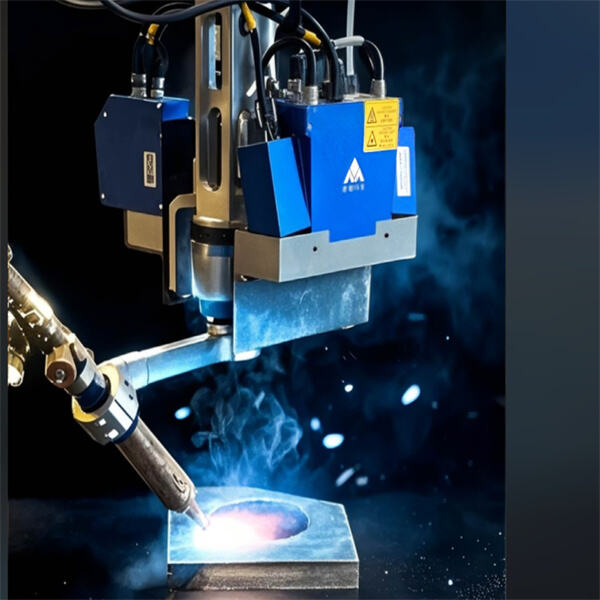
Sử dụng chức năng tìm kiếm và theo dõi, quét đường hàn, xác nhận vị trí và thông tin của đường hàn, điều chỉnh vị trí đường hàn giữa bản vẽ mô hình số 3D và chi tiết thực tế, giải quyết vấn đề hàn lệch do sai số của vật liệu đầu vào và biến dạng nhiệt.
Nhanh chóng, chính xác, hoàn toàn Không Cần Lập Trình, hiệu quả cao và độ chính xác cao. Giải quyết quá trình lập trình phức tạp của robot truyền thống và tiết kiệm thời gian ngừng hoạt động trong quá trình lập trình.
Công ty Công nghệ Bắc Kinh Minyue, với tư cách là doanh nghiệp công nghệ cao hàng đầu thế giới về ứng dụng thông minh không cần lập trình cho robot công nghiệp. Chúng tôi chuyên về sản xuất thông minh linh hoạt với hệ thống tự phát triển RobotSmart - Hệ thống Ra quyết định Thông minh, SmartVision - Hệ thống Thị giác Ánh sáng Cấu trúc Song song và SmartEye - Hệ thống Theo dõi Dây hàn Laser. Cung cấp giải pháp hàn và cắt robot thông minh thế hệ mới.
Cung cấp robot hàn mạnh mẽ với khả năng tải trước, tải bên, tải ngược, lắp đặt dạng giàn, quy hoạch quỹ đạo thông minh cho nhiều robot, nhiều trục ngoài và bàn xoay để làm việc hợp tác. Thực hiện mô phỏng chuyển động của robot, phát hiện va chạm, tránh điểm kỳ dị và phát hiện giới hạn trục.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








