 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


نا تعلیمی فلاؤں کی ساخت گینٹی ذہین ویلنگ روبوٹ

سٹیل سٹرکچر گینٹی ویلنگ روبوٹ
یہ آلہ سٹیل سٹرکچر کے لئے خصوصی ویلنگ روبوٹ ہے جو سٹیل سٹرکچر فیکٹروں میں خودکار تولید کے لئے بنایا گیا ہے۔
یہ آلہ سٹیل سٹرکچر کے لئے خصوصی ویلنگ روبوٹ ہے جو سٹیل سٹرکچر فیکٹروں میں خودکار تولید کے لئے بنایا گیا ہے۔
1. آلہ کے ذرائع کے طور پر مشتمل ہے: گائیڈ ریل کے حصے، گینٹی کے حصے، روبوٹ ایڈجسٹمنٹ کے حصے، الیکٹریکل کنٹرول باکس کے حصے، ویلنگ پاور سپلائی کے حصے، اور غیرہ۔
2. گینٹری کمپوننٹس میں ایک ڈرائوینگ اینڈ فریم، عرضی بیم، اور ایڈجسٹنگ فریم شامل ہیں۔ ڈرائوینگ اینڈ بیم، عرضی بیم اور ایڈجسٹنگ فریم سب کسے بیم ویلڈنگ سٹرکچر کا استعمال کرتے ہیں، اور ویلڈنگ کے بعد تنشن ریلیف تراٹمنٹ کا سامنا کرتے ہیں۔ سٹرکچر کompct ہے اور ظاہری طور پر خوبصورت ہے۔
3. پوری مشین کے ڈرائوینگ اینڈ بیم میں جاپانی پیناسونک کے AC سرور ڈرائیور اور موتار کا استعمال ہوتا ہے جو جاپانی SHIMPO ریڈیوس کو چلاتا ہے، اور پھر گیر اور گیر کے ذریعے تراشی ہوتی ہے۔ افقی گائیڈ چھلنی ڈرائوینگ اینڈ بیم کی جانب لگائی جاتی ہے۔ گائیڈ چھلنی اپنے ایکسینٹرک شافٹ کو تنظیم کرتے ہوئے گائیڈ ریل پر دبا سکتی ہے، جس سے پوری مشین کے عمل کی ثبات اور صحت کا یقین ہوتا ہے۔
4. گاڑی کے چلنے والے ریلوں کो سب پر 38KG/M سے بنایا گیا ہے۔ ریلوں کے باہری طرف میں دقت سے ماشین کردہ گیر کھانوں کی ترتیب کی گئی ہے۔ گیر کھانا 45 سٹیل سے بنایا گیا ہے اور اس کا ماڈیول 2.0 ہے۔ دوطرفہ چلاؤ کا طریقہ اپنادیا گیا ہے۔ ریلوں کو پریشر پلیٹ بیکنگ پلیٹس کے ذریعے ثابت کیا گیا ہے۔ یہ تنصیب کرنے کا طریقہ لامحدود طے شدہ فنی پارامیٹرز جیسے دونوں ریلوں کی لمبائی کی مستقیمیت اور متوازیت کو یقینی بناتا ہے۔
غیر-تعلیمی ذکی ویلنگ کے لئے سپورٹ خصوصی طور پر ڈرافٹنگ ٹائپ 3D ڈرائنگ انپورٹ، ویلنگ سیم کے خودکار استخراج، روبوٹ ویلنگ تراجکٹری کی خودکار تولید، حالت کی وژوالائزیشن، اور ویلنگ ٹارچ کے خودکار ٹیسٹ کے لئے تقسیم کیا جاتا ہے۔
روبوٹ ویلنگ تراجکٹری کی خودکار تولید، حالت کی وژوالائزیشن، ویلنگ تراجکٹری کی اپٹیمائزیشن، اور ٹارچ کولیژن کی خودکار ٹیسٹنگ۔
اور ڈرائنگ کے بغیر، 3D اسکیننگ واپسی ماڈلنگ، 3D ڈرائنگز کی تیزی سے تخلیق، روبوٹ جوش تراجم کی خودکار تخلیق، جوش تراجم کی_optimization، حالت کی ویژوالائزیشن، اور جوش ٹارجٹ کے برخورد کی خودکار تشخیص۔
پیرامیٹر
| کام کے قطعے کی ماکسimum لمبائی | 11M |
| فلینج کی چوڑائی | 2.5M |
| گینٹی متحرک ریل گیج | 2800 mm |
| گینٹی متحرک موتار طاقت | 2x0.75 kW |
| گینٹی متحرک ویلنگ سرعت | 100-1000 مم/منٹ |
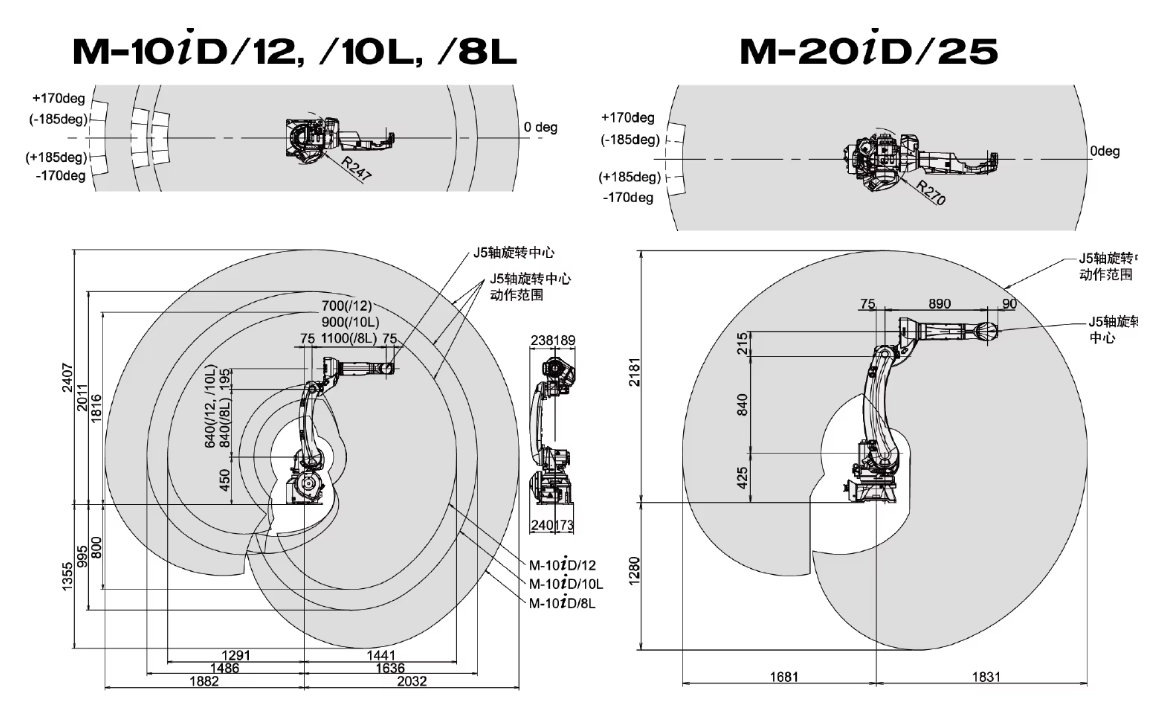
ویلنگ روبوٹ
جاپان میں تیار کیا گیا فینک ایس ویلنگ روبوٹ استعمال کیا جاتا ہے۔ روبوٹ کے خاص پارامیٹرز مندرجہ ذیل ہیں۔
LDWEP-500 ليزر ٹریکر
LDWEP-500 ایک ذکی لائن سکیننگ ویلنگ سیم سینسر ہے۔ یہ لائن ليزر سکیننگ کے ذریعے ویلنگ سیم کے علاقے کی موروثی معلومات حاصل کرتا ہے، اور روبوٹ یا ویلنگ مشین کو خودکار طور پر ویلنگ مکمل کرنے کے لئے مرشد کرتا ہے۔ تصویر کی حاصل کردگی، پروسیسنگ اور ویلنگ سیم شناخت کے فنکشن سینسر کے اندر مکمل ہوتے ہیں اور بیرونی کمپیوٹر کی ضرورت نہیں ہوتی۔ اس میں بالا درجہ کی یکجہتی ہے اور نظام کے کل ہارڈویئر کے لاگت کو کم کرتا ہے۔ اسے آرک روشنی اور چھڑیلوں کے خلاف مقاومت ہوتی ہے، ویلنگ سیم کو ذکی طور پر شناخت کرتا ہے، اور اس کا عمل کرنا آسان ہے۔ اس کی تخلیقی ساخت، تنگ سائز، زیادہ دستیابی، اور غنی قسم ہے۔ اسے اطلاق کے موقع کے مطابق منتخب کیا جا سکتا ہے، اور سب سے مناسب پارامیٹرز کو سفارشی بنایا جا سکتا ہے۔

ویلنگ پاور سورس ٹینکٹکل سٹیل سٹرکچر انڈسٹریل ہیم 6-9 محور ویلنگ روبوٹ اسٹیشن چین
میگمیٹ CM500 ویلنگ پاور سرکے کا استعمال: ایک مکمل طور پر ڈجیٹل صنعتی بہت بڑی حملہ آور CO2/MAG/MMA ذکی ویلنگ مشین۔ یہ مختلف کاربن استیل ویلنگ پروسیس کے شعبوں میں عام طور پر استعمال ہوتی ہے: ریل ترانزٹ، کار، جہاز بنانے، استیل سٹرکچر، کونٹینر، ماشینری، ہارڈوئیر اور دیگر صنعتیں، اس کے علاوہ صنعتی بھاری لوڈ اور کھاری situations میں بھی کام کرتی ہے







