 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


زمنی ریل کا طریقہ II ذکی ویلنگ روبوٹ اسٹیشن فولادی ساخت کے لئے

زمنی ریل کے طور پر ویلنگ روبوٹ میں دوستپناپنے والی ذکی ویلنگ سسٹم اور بڑی بصری دوری کی جھکاؤ ٹریکر ڈالی گئی ہے۔ یہ Tekla، SolidWorks یا UG کے 3D ماڈل فائلوں کو مستقیم طور پر درج کر سکتا ہے، ویلنگ پروسیس پارامیٹرز کو مستقیم طور پر مطابقت دے سکتا ہے، ویلنگ کے لئے مضبوط ویلنگ پوزیشن کو خودکار طور پر شناخت کرتا ہے اور بہترین مناسب ویلنگ پروسیس تولید کرتا ہے۔
زمنی ریل کے ذریعے چلنے والی محور طول کی جانب سے مروجہ کو بڑھاتی ہے۔ روبوٹ ریل سے جڑ سکتا ہے تاکہ ایک بار میں لمبی سیم وڈ کرسکے، اور ورک اسٹیشن ریل کے دائیں اور بائیں طرف کام کرسکتا ہے۔ یہ عمدہ طور پر H بیم ریبر پلیٹس، کالم باس پلیٹس، پرلین سپورٹ پلیٹس، کوربلز اور دیگر ساختیات کے لیے وڈنگ کے لیے استعمال ہوتا ہے۔
| روبوٹ | ایک فانک یو روبوٹ کا سیٹ |
| اختیاری وڈنگ پاور سرچر | آؤٹائی وڈنگ مشین اور ان کے لاوازم یا میگمیت وڈنگ مشین اور ان کے لاوازم |
| وڈنگ نظام | مینیوئے تدریس مفت آف لائن پروگرامنگ وڈنگ سافٹویر، مینیوئے ليزر وژن ٹریکنگ سسٹم۔ |
| معمولی صورتحال | گاسٹ پلیٹس، کوربل حصے، چھوٹے ساختیاتی حصے اور دیگر کے لیے مناسب ہے۔ حال حاضر میں یہ استعمال کیا جا سکتا ہے H شیپڈ میں میں بنیادی بیم اور ثانوی بیم، جہاز کے پل کے چھوٹے اور درمیانی پلیٹ یونٹس، ڈیوائیس H شیپڈ استیل کالم، ڈیوائیس پلیٹ فارم بیم اور دیگر ساختیات میں۔ |
| گن صفائی نظام | SC220A گن صفائی سسٹم |
| زمین پر ریل کی لمبائی | 6 میٹر (استعمال کنندہ کے مطابق اختیاری) |
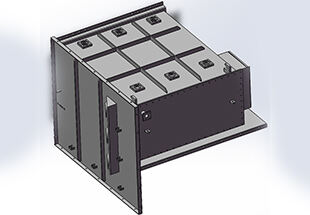
گن صفائی سسٹم
SC220A گن صفائی اسٹیشن روبوٹ ویلنگ گن کو صاف کرنے کے لئے ایک دستگاہ ہے۔ یہ روبوٹ ویلنگ کے دوران ویلنگ گن کے لحاظ کو خودکار طور پر صاف کرتا ہے، خودکار طور پر تھریڈ کوٹ کاٹتا ہے، اور ویلنگ گن نوز اور کنٹیکٹ ٹپ کو حفاظت کرتا ہے، جس سے ویلنگ گن کی عمر بڑھ جاتی ہے اور مالیات کو بچایا جاتا ہے۔ خرچ کے مواد کے خرچ کو کم کریں، بہتر ویلنگ کی قسمت برقرار رکھیں، اور ویلنگ کفاءت میں بہتری کریں۔ آسان عمل اور استعمال کے لئے آسان۔
گن صفائی اسٹیشن کے فوائد: 1. گن صفائی کا وقت کم ہوتا ہے اور سسٹم کی دستیابی زیادہ ہوتی ہے۔ 2. گن صفائی کے عمل کو ہاتھ کام کے بغیر خودکار طور پر مکمل کریں۔ 3. ویلنگ کے دوران آلودگی سے پیدا ہونے والے قسمت کے مسائل سے روکنا۔ 4. روبوٹ TCP کی علامت کے ساتھ مسلح ہے۔
روبوٹ ویلنگ سافٹویئر
سافٹوئر خودکار طور پر ڈرائنگز سے جوشیں نکال سکतی ہے جن میں جوش علامت نہیں ہوتی، یہ دستی شرکت کا کام کم کرتی ہے۔ اچھی کارکردگی والے 3D 엔جن اور روبوٹ کنٹرولر کے ساتھ، خودکار طور پر بنائے گئے نقاط محاکیت اور تصدیق کیے جاتے ہیں تاکہ واقعی کام میں برخورد کی وجہ سے پیدا ہونے والے مسائل سے بچا جا سکے۔
اور ڈرائنگ کے بغیر، 3D اسکیننگ واپسی ماڈلنگ، 3D ڈرائنگز کی تیزی سے تخلیق، روبوٹ جوش تراجم کی خودکار تخلیق، جوش تراجم کی_optimization، حالت کی ویژوالائزیشن، اور جوش ٹارجٹ کے برخورد کی خودکار تشخیص۔
LDWP-305 ليزر ٹریکر
LDWP-305 ایک ذہین لائن سکیننگ ویلنگ سیم سینسر ہے۔ یہ ویلنگ سیم کا مقطعی جانکاری خط لیزر سکیننگ کے ذریعے حاصل کرتا ہے، اور روبوٹ یا ویلنگ مشین کو خودکار طور پر ویلنگ مکمل کرنے کے لئے导读 کرتا ہے۔ تصویر کی حاصل کردگی، پروسیسنج اور ویلنگ سیم کی شناخت کی فنکشنز سینسر کے اندر مکمل ہوتی ہیں، ایک بیرونی کمپیوٹر کی ضرورت کے بغیر۔ اس کی عالی تجمیع ہے اور نظام کے کل ہارڈویئر کے لاگت کو کم کرتی ہے۔ اسے آرک روشنی اور سپیٹر سے مقاومت ہوتی ہے، ویلنگ سیموں کو ذہین طور پر شناخت کرتی ہے، اور اس کا عمل آسان ہے۔ اس کی دلچسپ بنیاد، تنگ سائز، عالی دستیابی، اور ثریف قسمیں ہیں۔ اسے استعمال کرنے کے لئے ایپلی کیشن سناریو کے مطابق منتخب کیا جا سکتا ہے، اور مناسب ترین پارامیٹرز کو سفارشی بنایا جा سکتا ہے۔

فائدہ
1. مختلف مصنوعات کے لئے نون-ٹیچنگ کا سپورٹ فراہم کرتا ہے، جیسے سینڈویچ پینلز، ٹرس بیمس، بریکٹ، برج پارٹیشنز، اور پینل اسٹینڈز;
2. ڈیزائن کے مرحلے میں ویلڈس کو نشان زد کرنے کی ضرورت نہیں ہوتی، اور 3D رسمیں import کرتے ہوئے ہدف ویلڈ پوزیشن خودکار طور پر نکال لی جا سکتی ہے؛
3. کسی بھی انسانی تداخل کی ضرورت نہیں ہوتی، روبوٹ خودکار طور پر صفر واپسی، تبدیلی، پوزیشن فاؤنڈنگ، ویلڈنگ، گنتی، اور گن صاف کرنے جیسے کامات مکمل کرتا ہے؛
4. جائیں پر عمل کی ضرورت نہیں ہوتی، پروگرام کسی بھی وقت اور جگہ بنایا جा سکتا ہے، اور مقررہ وقت کے مطابق روبوٹ کو دور سے پیدا کر کے پروڈکشن میں بھیج دیا جا سکتا ہے؛
5. خود شروع کردہ آف لائن پروگرامنگ، روبوٹ کے حرکات کی 1:1 سمولیشن، پہلے ہی روبوٹ کی مداخلت سے بازی کرتی ہے اور ٹکراؤں سے بازی کرتی ہے؛
6. ڈیجیٹل ٹوئن ٹیکنالوجی موقع پر روبوٹ کی تراjectry، ویلڈنگ ولٹیج، کرینٹ، سپیڈ اور دیگر پروڈکشن معلومات کو حقیقی وقت میں ظاہر کر سکتی ہے۔
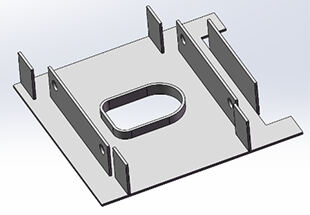
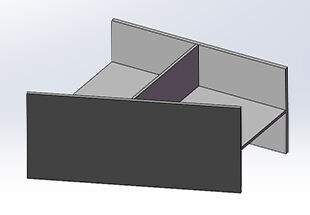
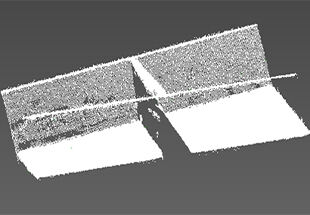
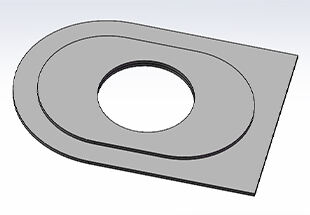
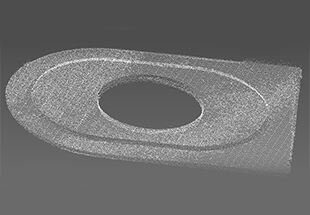
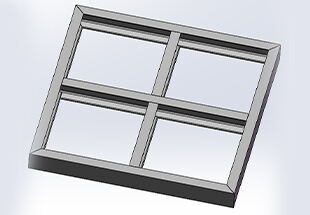
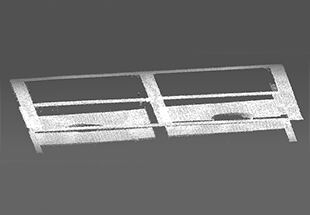
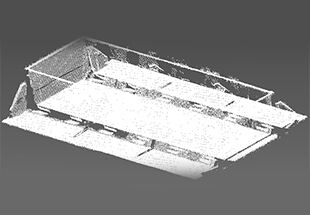
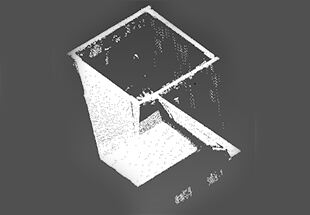
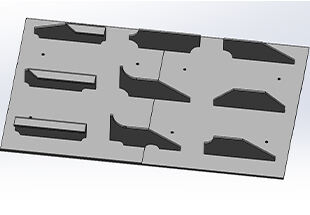
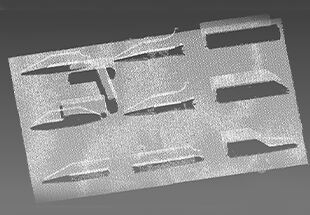
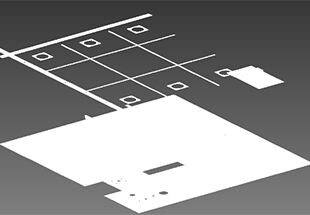
| نہیں | کام کا قسم | ورک پیس کی تصویر کی ماڈل | ورک پیس کا پوائنٹ کلاؤڈ تصویر |
| 1 | H Beam ( Butt ویلڈس شامل ہیں) | 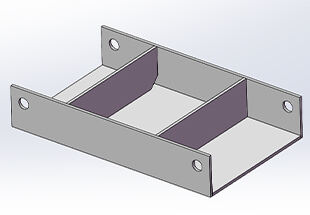 |
 |
| 2 | برڈ یونٹ |
 |
 |
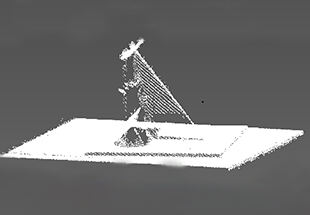
| 3 | فلیٹ کوربل |
 |
 |
| 4 | ٹریٹڈ |
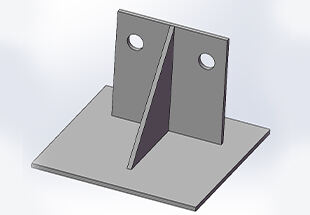 |
 |
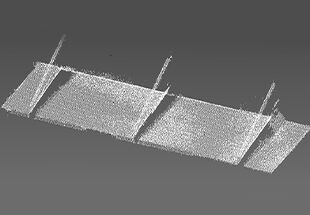
| 5 | پرلن سپورٹ پلیٹ |
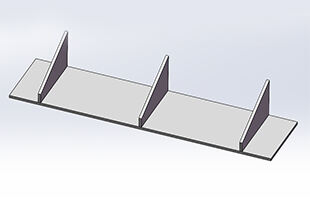 |
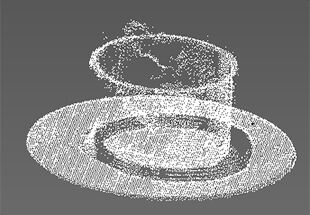
 |
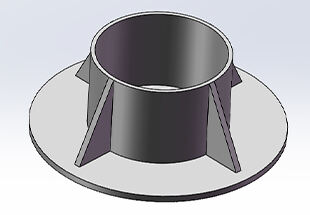
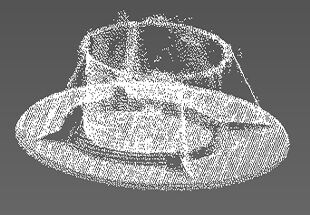
| 6 | گول طویلی بیس |
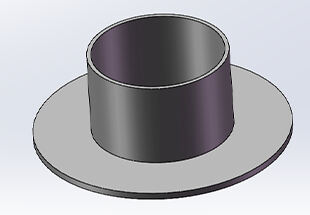 |
 |
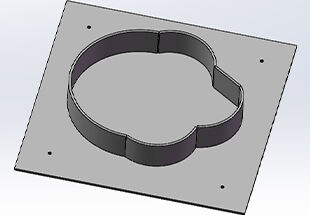
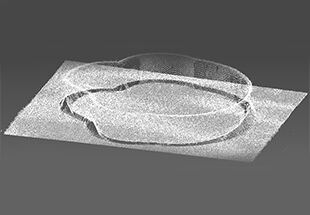
| 7 | چھاپے کی شکل کا گول طویلی بیس |
 |
 |
| 8 | غیر زمینی سطح |
 |
 |
| 9 | دوبہری لیئر بورڈ |
 |
 |
| 10 | چینل بیم اسمبلی |
 |
 |
| 11 | دوبارہ وِلڈ لپ جوائنٹ | 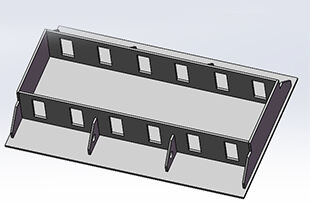 |
 |
| 12 | بوکس گیرڈر |
 |
 |
| 13 | نامنظم گیندے کاری وِلڈنگ |
 |
 |
| 14 | ٹرانزفورمر ٹینک |
 |
 |





