EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


کوئی پروگرام نہیں ذکی روبوٹک ویلڈنگ اسٹیشن
“بیجنگ مینیوے ٹیکنالوجی کمپنی، لمیٹڈ ”چین کی ایک قیادت کار انفراتکنال کمپنی جو نا- تدریس صنعتی روبوٹس کی ذہانت خود مختار RobotSmart- ذہینی فیصلہ سازی نظام، SmartVision- دونوں چشمی ساختی روزن وژن نظام اور SmartEye - لیزر جوڑے پیروی نظام کے ساتھ مشتمل انٹیلیجنس مینیفیکچر کی طرف زور دیتے ہوئے، نئی پیداوار کی ذہینی روبوٹ غیر تعلیمی ویلنگ اور کٹنگ حل فراہم کرتے ہیں۔
ہمارے کمپنی کے پاس گرافیکس اور خودکار کار کے شعبوں سے ماスター اور ڈاکٹر کی درجے حاصل کرنے والے اور تکنیکی ماہرین کے عالمی R&D ٹیم ہے۔ ان میں سے زیادہ تر 90 فیصد کے پاس ماスター یا اس سے اوپر درجہ ہے۔
روبوٹ کنٹرول، الگورتھم اور انسان-روبوٹ تعامل میں تخصص رکھتے ہوئے، ہم عالمی صنعتی قطاع کو بہتر روبوٹکس ذہانت پورے حل دینے کیلئے وابستہ ہیں۔
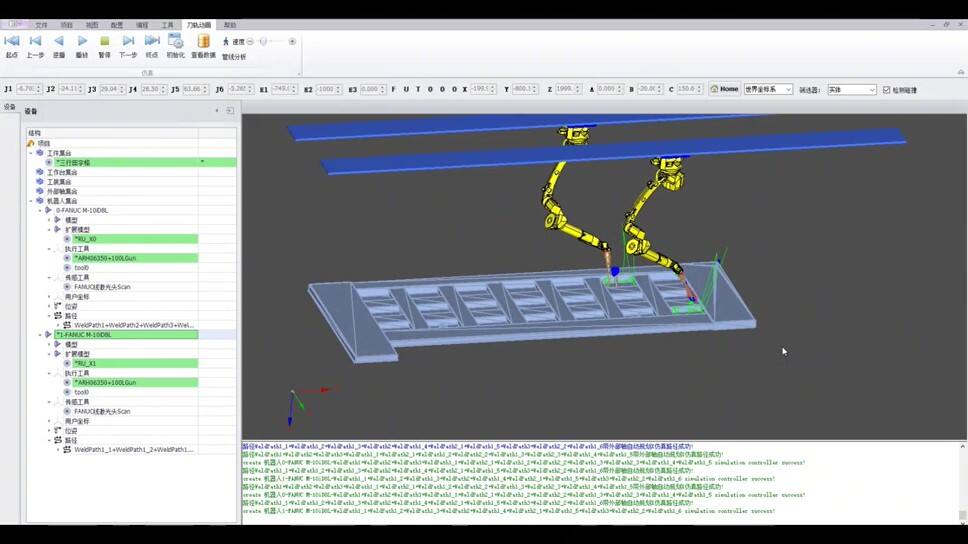
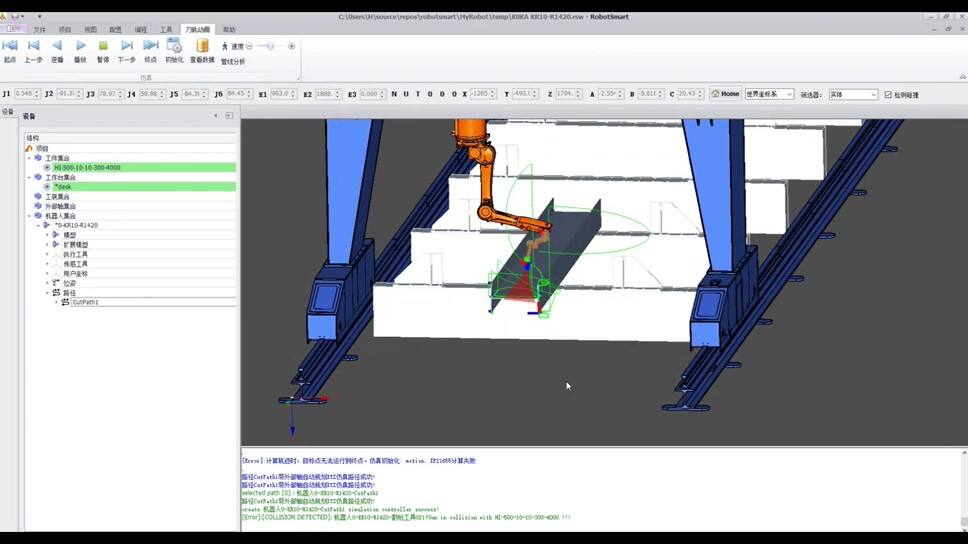
جب کہ استعمال کنندہ 3D ورک پیس مডل کو RobotSmart- مصنوعی ذہانت ایڈیسیم میں داخل کرتا ہے، تو سافٹوئیر تیزی سے خودکار طور پر صنعتی روبوٹ کے حرکت کوڈ پیدا کر سکतی ہے، اور اسی وقت روبوٹ کی حرکت کا محاکہ، ٹکراؤ کا پتہ لگانا، راستہ منصوبہ بنا کر مشکلات سے بازیابی، انفرادیت کا بازیابی اور محور حد کا پتہ لگانا جیسے فنکشن دستیاب کر سکتی ہے، تاکہ سنتی مرکزی اور ناکارآمد ہاتھ سے تعلیم پروگرامنگ عمل سے بچا جاسکے۔
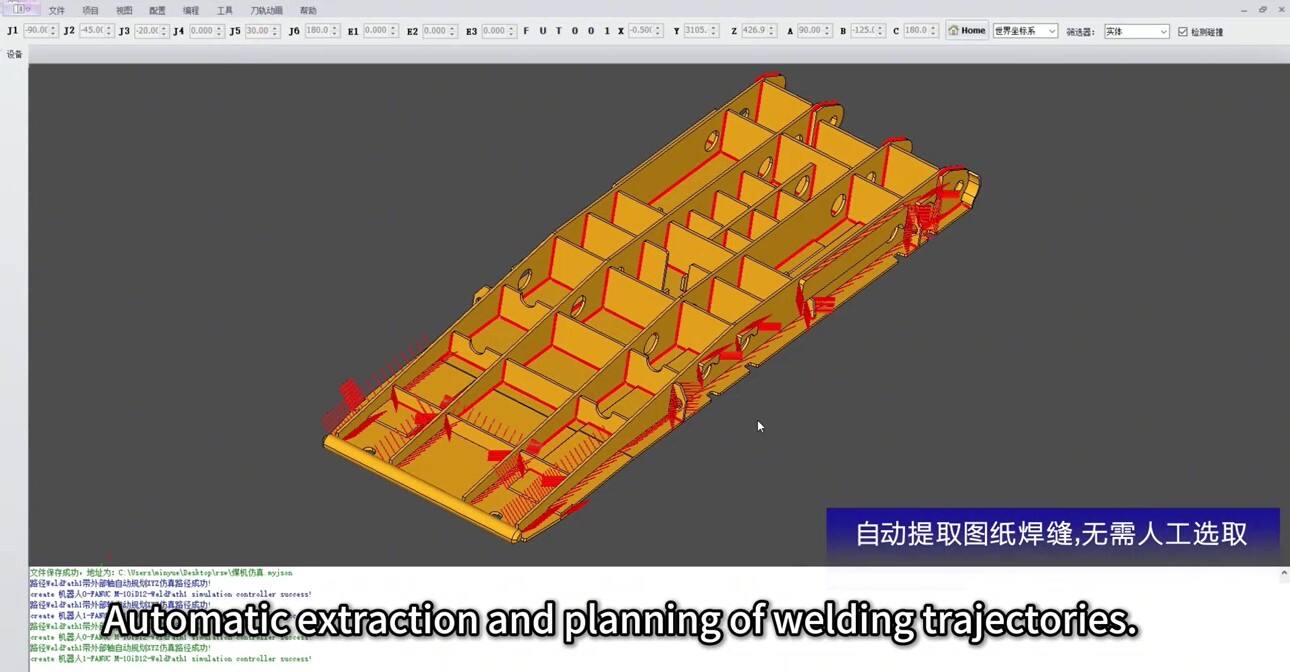
نئی سمت کی طرف بڑھتے ہوئے، صنعت کے مسئلے حل کرتے ہوئے۔
Coal machine industry hydraulic सपोर्ट करता ہے ویلنگ کے مسائل، صنعتی اپگریڈ پر تاثر
Coal machinery صنعت میں عام طور پر استعمال ہونے والے ہائیڈرولیک سپورٹ کے اہم ساختی اجزا کا وزن 20 ٹن سے زیادہ ہوسکتا ہے۔ ان میں سے اکثر میڈیم-ٹھکے پلیٹس سے ویلنگ کے ذریعے بنے گئے ڈبا شکل کے ساختی اجزا ہوتے ہیں۔ یہ ہائیڈرولیک سپورٹ کے اہم حصے ہوتے ہیں جو بھاری بحران اور ضربات کو تحمل کرتے ہیں۔ ہائیڈرولیک سپورٹ میں کم طویل، تین بعدی عرضی ویلنگ کے ساتھ مغلوب ہوتے ہیں۔
1,000 سے زیادہ ویلنگ اور ان میں سے زیادہ تر وسطی-موٹی پلیٹوں کا چند طبقاتی چند گزرنے والا ویلنگ ہوتا ہے۔ ویلنگ سیم کثیف ہوتا ہے، ویلنگ کی دستیابی ضعیف ہوتی ہے، اور اس کی ویلنگ کیfait کام کے علاقے کی صاف تولید کو مستقیم طور پر متاثر کرتی ہے۔
اس کی خاص ساخت اور پروسیس کی پیچیدگی کی بنا پر، ہاتھ سے ویلنگ کارکردگی کی ثبات اور ویلنگ کیfait کی مطابقت کو گarranty نہیں دے سکتی۔
معمولی روبوٹک ویلنگ استعمال کریں۔
- تدریس پروگرامنگ، ر رکاوٹ کی ضرورت ہوتی ہے اور روبوٹ کا استعمال کم ہوتا ہے۔
- ساخت پیچیدہ ہے، فریمز میں فریم ہوتے ہیں اور مختلف سائز کے ہوتے ہیں، اور 1,000 سے زائد ویلنگ ہوتی ہیں، ضرورت 5 دنوں لگتے ہیں سکھائیں دستی طور پر پروگرام کرنے میں۔
- ویلنگ کے قطعے کی پوزیشن اور جمع کرنے کی صحت کام کی ضرورت کو پورا نہیں کرتی، اور مرکزی طور پر ویلنگ کے باعث ہونے والے گرمی کے تبدیلی کی وجہ سے ویلنگ کا ختیاں ہوجاتا ہے۔
- پوری ہائیڈرولک سسٹم کے روبوٹ ویلڈنگ اتومیشن کو عملی بنانا بہت مشکل ہے सपोर्ट करता ہے ساختیاتی پارٹس۔
Coal ماشین صنعت میں ایک آگے چلنے والی کمپنی، جو Minyue Technology کی ایک بٹن شروعات، غیر تعلیمی ذہین ویلڈنگ حل کا استعمال کرتی ہے۔
قدموں 1: ہمارےPelanggan 3D کام کا ماڈل روبوٹسمارٹ - ذہین فیصلہ گیر سسٹم میں import کرتا ہے۔
قدیم 2: RobotSmart-ذہنی فیصلہ گیری نظام، جو تیزی سے خودکار طور پر صنعتی روبوٹ کا مسیر تیار کر سکتا ہے، اور تو ہی روبوٹ کی حرکت کا محاکیہ کر سکتا ہے، ٹکراؤ کا پتہ لگا سکتا ہے، منفردیت کو باز کر سکتا ہے اور محور حد کا پتہ لگا سکتا ہے۔
قدم 3: SmartVision-3D دوطرفہ سٹرکچرڈ لاイト وژن سسٹم کام کی خشن پوزیشننگ کرتا ہے۔ 3D دوطرفہ سٹرکچرڈ لاイト وژن سسٹمز کام کی سطح کو اسکین کرتا ہے اور پوائنٹ کلا우ڈ ڈیٹا سے معکوس ماڈلنگ کرتا ہے۔ ماڈلنگ کی دقت کے اندر کام کی سطحی خصوصیات بازیابی کرتا ہے ± 5mm. کام کے لئے جمع کرنے اور ابتدائی پوزیشننگ کے لئے سوند کی دقت 40 mm کے اندر۔ ,اسembly کے زاویہ کا پتہ لگائیں 10 کے اندر °۔ 30 مم (مطابق) کے اندر ویلڈ لمبائی کے تبدیلیوں کا پتہ لگائیں 。
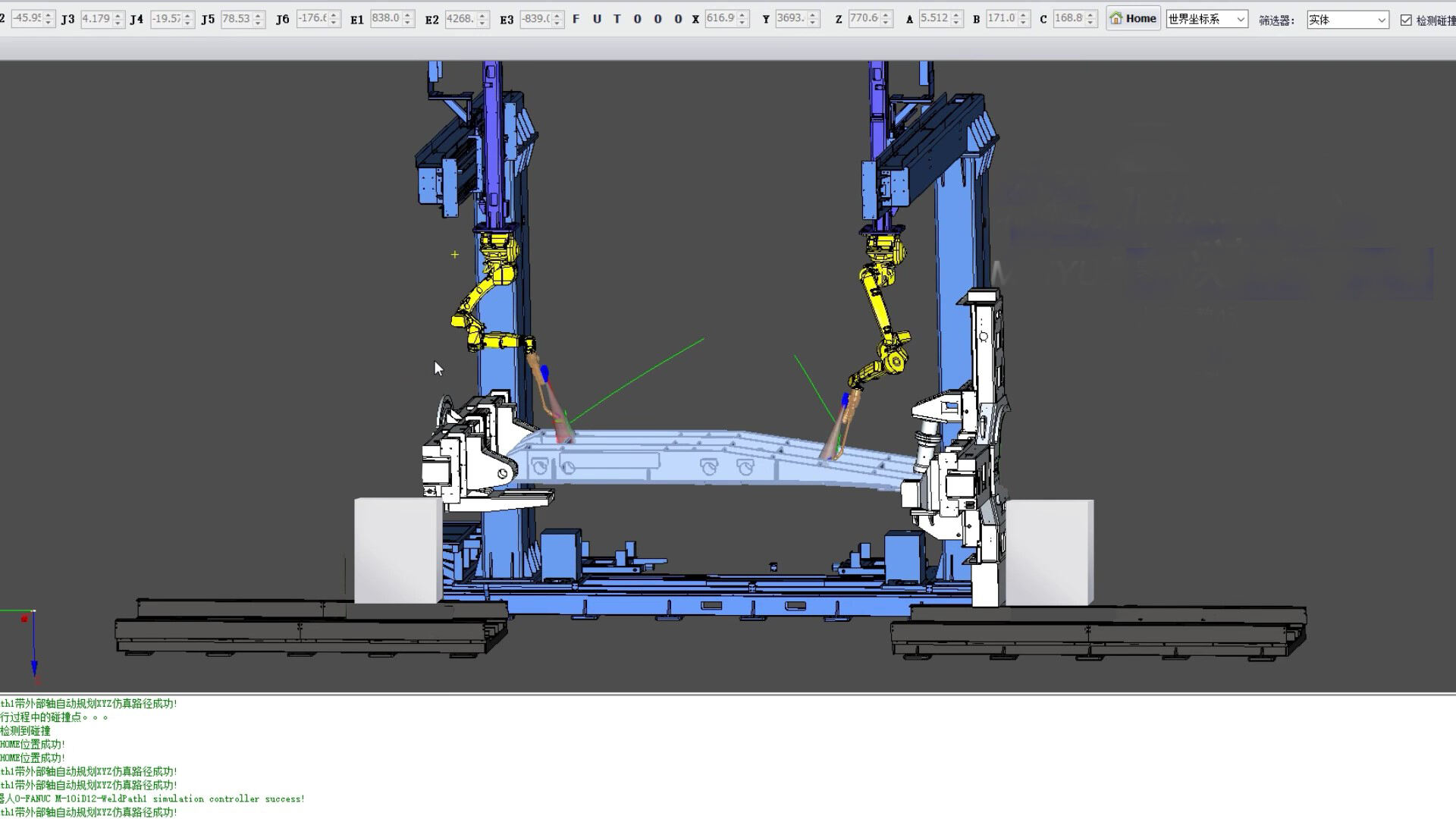
قدم 4: SmartEye - ليزر وژن ٹریکنگ سسٹم. ویلڈ سیم کا اسکیننگ کرنا، ویلڈ سیم کی پوزیشن اور معلومات کी تصدیق کرنا، 3D ڈیجیٹل ماڈل اور حقیقی ورک پیس کی ویلڈ سیم پوزیشن کو تصحیح کرنا، اور حقیقی ویلڈ سیم پوزیشن ڈیٹا حاصل کرنا. متعدد روبوٹ، متعدد بیرونی محور، اور پوزیشنر تعاونی کام کریں۔
SmartVision-3D دو نظری بنیادی روشنی وژن سسٹم 3D ماڈلز کو درج کرنا ,حاصل کردہ 3D پوائنٹ کلا우ڈ ڈیٹا کو 3D ڈیجیٹل ماڈل سے موازنہ کریں ,روبوٹ صرف وہ ویلڈ کرتا ہے جس کے پاس 3D پوائنٹ کلا우ڈ ڈیٹا ہوتا ہے۔ جب سنسر کے ذریعے حاصل کردہ پوائنٹ کلا우ڈ ڈیٹا نئے کمپوننٹس کے ساتھ ریٹرو فٹ کردہ ورک پیس کے 3D ماڈل سے مطابقت پذیر ہوتا ہے، تو ریٹرو فٹ کردہ کمپوننٹس ویلڈ کیے جاتے ہیں۔
حقیقی طور پر ایک بٹن کے ذریعہ پروڈکشن شروع کرنے کا آغاز، 2 منٹ میں آرک کا آغاز کرنا، تیز، مضبوط، کامل طور پر غیر پروگرام، موثر عمل اور بلند درجے کی دقت۔
ٹیکنالوجی کی آگے نہیں، صنعت کا دلچسپی۔