EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



Senzor de urmărire a jointurilor LDWP-305
Generația nouă de senzor de urmărire a joncțiunii prin intermediul noilei arhitecturi MINYUE a fost actualizată pentru a îmbunătăți semnificativ performanța de bază, iar în combinație cu nevoile utilizatorilor de pe piață, s-a realizat o diviziune orientată, oferind utilizatorilor o gamă completă de produse, de la aplicații de bază până la extensii avansate.
- Prezentare generală
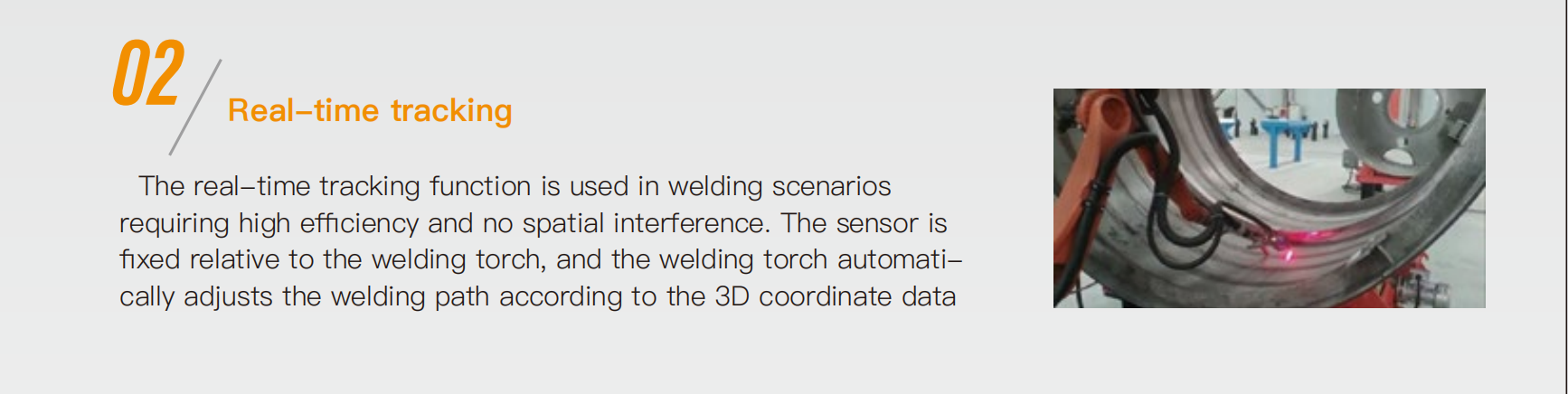
Sistemul de urmărire a joncțiunii SmarEye WR este un sistem de vizion laser 3D pentru sudura robotică dezvoltat de Beijing Minyue Technology Co., LTD. Suportă marcaje de roboți precum KUKA, Yaskawa, ABB, Fanuc, Kawasaki, Siasun, Guangshu etc. Sistemul constă din trei părți: senzor laser, gazdă de control și software.
· Senzorul laser este folosit pentru colectarea datelor
· Sticlă protecție este folosită pentru a proteja lentilele optice
· Suport fix este folosit pentru a monta senzorul laser pe pistolul de sudură
· Gazda de control este folosită pentru configurarea și controlul operațiunii senzorului laser
· Cablu de comunicație este folosit pentru a conecta senzorul la gazda de control
· Scutul protector este folosit pentru a proteja senzorul de lumina de arc și de proiecții.
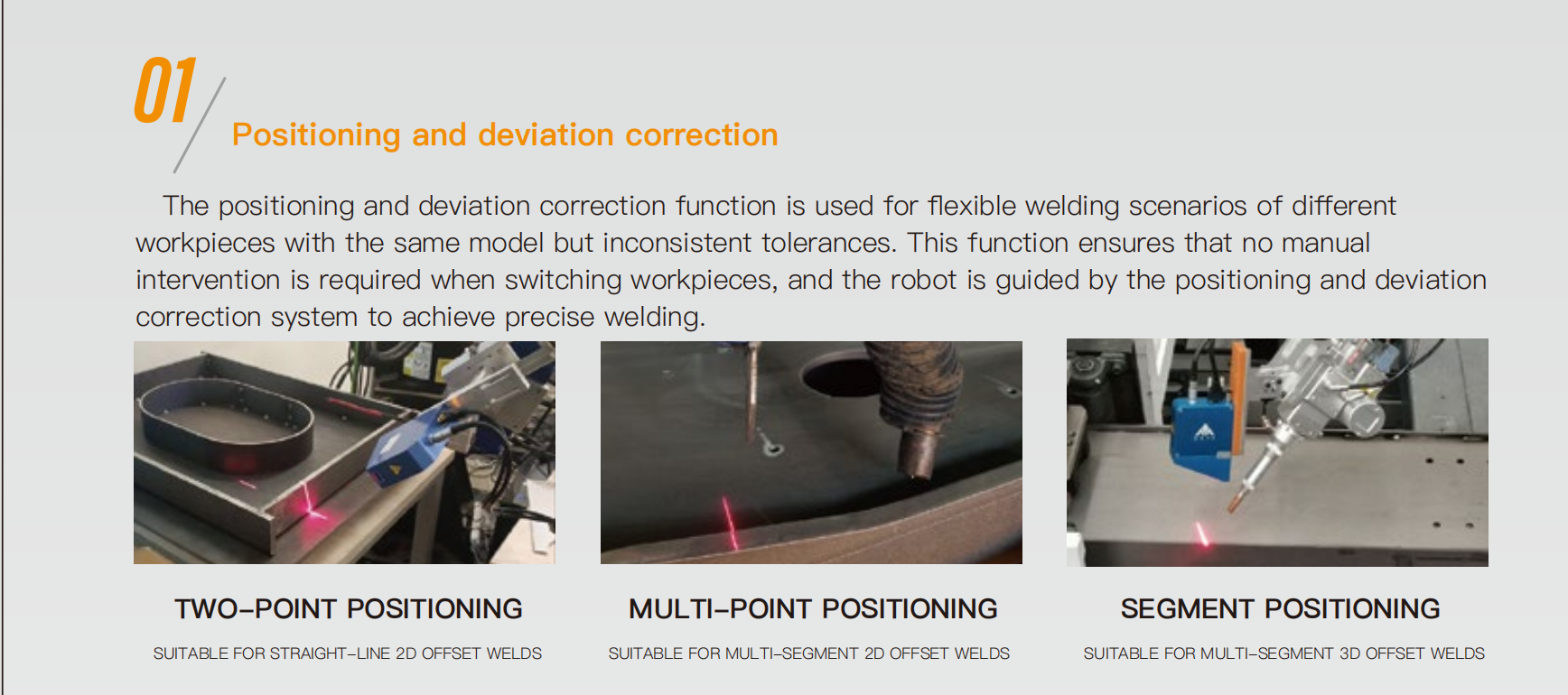
Urmărirea optica a joielurilor este potrivită pentru detectarea automată a joielurilor, de exemplu, în procesele de sudare sau lipire. Prin utilizarea liniilor de măsurare, poziția componentei este detectată, iar precizia urmăririi joielurilor este îmbunătățită.
DESCRIERE FUNCȚIONALĂ
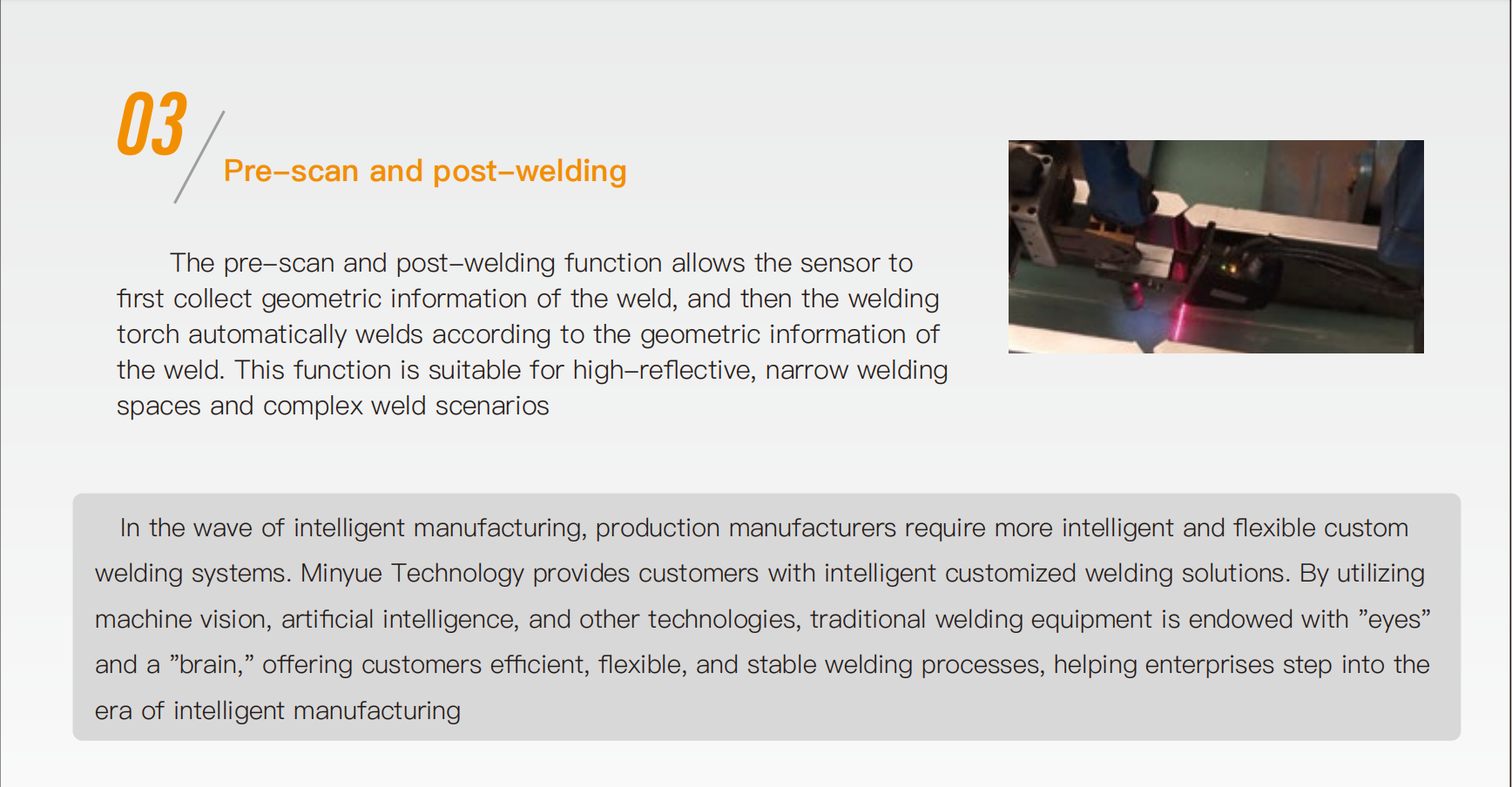
Senzorul robust LDWP-305 de triangulare este conceput pentru utilizare industrială, chiar și cu materiale altceva reflective. Senzorul scană joiinta fără contact și transmite poziția joiintei, dimensiunea golului, deplasarea marginii și orientarea unghiului al unghiului instrumentului față de suprafața componentei către controlul robotului.
Senzorul este potrivit pentru cele mai exige aplicatii, deoarece este insensibil la lumină strabatatoare, apă și praf (IP67) și imun la radiația electromagnetică (EMC).
Vă rugăm să selectați tipul în mod rațional conform domeniului de aplicare real, pentru a evita coliziunea piesei de lucru cu senzorul; încărcarea robotică este de obicei de 20KG.