 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



Senzor de urmărire a joncțiunii LDWEM cu laser
Cu găsire a poziției, urmărire în timp real, scanare și sudare automată.
- Prezentare generală
- Suport pentru marca de robot
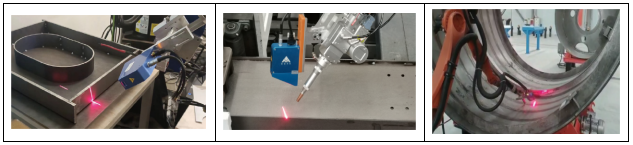
Senzorul de urmărire a joielului cu laser folosește un laser pentru a iradia suprafața joielului de sudare, formând o bandă de lumină laser, care este primită și imaginată de o cameră de înaltă definiție. Prin prelucrarea algoritmica, caracteristicile tridimensionale ale joielului de sudare sunt transformate în informații structurate, inclusiv coordonatele articulațiilor de sudare, deplasările, intervalele, etc. Această informație este transmisă controlerului robot, oferindu-i robotului traiectoria și parametrii de proces necesari pentru sudare, ghidând robotul să sudeze sau să corecteze deviațiile pieselor de lucru în timp real, realizând astfel o sudare perfectă. Comparativ cu alte soluții, urmărirea joielului cu laser are avantajele de nefiind în contact, precizie ridicată, viteză rapidă și bună adaptabilitate.
Senzorul adoptă măsurarea cu lumină structurată liniară, care are o viteză rapidă de imaginare pe linie, fără contact și fără mișcare mecanică; O adaptabilitate puternică, capabilă să furnizeze parametrii ale cozii de sudare; Total integrat, cu computere industriale externe și multe alte avantaje, este folosit pe scară largă în diferite tipuri de sudare automatizată. Indiferent de procesul de sudare, putem oferi un sprijin de încredere și o performanță stabilă pentru a ne asigura de rezultate excelente în diferite scenarii de sudare.
Senzorul este potrivit pentru cele mai riguroase aplicații, deoarece este insensibil la lumină stray, apă și praf (IP67) și imun la radiația electromagnetică (EMC).
Cu Funcționalitate Puternică.
01. corecție a poziției și a deviațiilor
Funcția de corecție a poziției și a deviațiilor este utilizată în scenarii de sudare flexibilă pentru diferite piese cu aceeași model dar cu toleranțe inconsistente. Această funcție se asigură că nu este necesară intervenția manuală la schimbarea pieselor, iar robotul este ghidat de sistemul de corecție a poziției și deviațiilor pentru a realiza o sudare precisă.
Poziționarea cu două puncte, potrivită pentru cozi de sudare 2D pe linie dreaptă.
Poziționare Multi-Puncte Apropriat pentru umflături 2D cu mai multe segmente
Poziționare Segmentară Apropriată pentru umflături 3D cu mai multe segmente.
02 Urmarire în Timp Real
Funcția de urmarire în timp real este folosită în scenarii de sudare care necesită o eficiență ridicată și fără interferențe spațiale. Senzorul este fixat în mod relativ față de pistolul de sudare, iar pistolul de sudare ajustează automat traseul de sudare în funcție de datele de coordonate 3D.
03. Scanearea și Sudarea Automată
Funcția de scaneare și sudare automată permite senzorului să colecteze mai întâi informații geometrice despre umflături. Această funcție este potrivită pentru spații de sudare înguste, reflexive și scenarii complexe de sudare.
Urmarire prin Lazer a Juntelor
Urmarire prin Lazer a Juntelor poate detecta devieri ale juntelor în sus, jos, stânga și dreapta.
Poate detecta juntile de sudare cu goluri mici.
Rezolvă problema urmăririi juntelor de sudare pentru plăci subțiri.
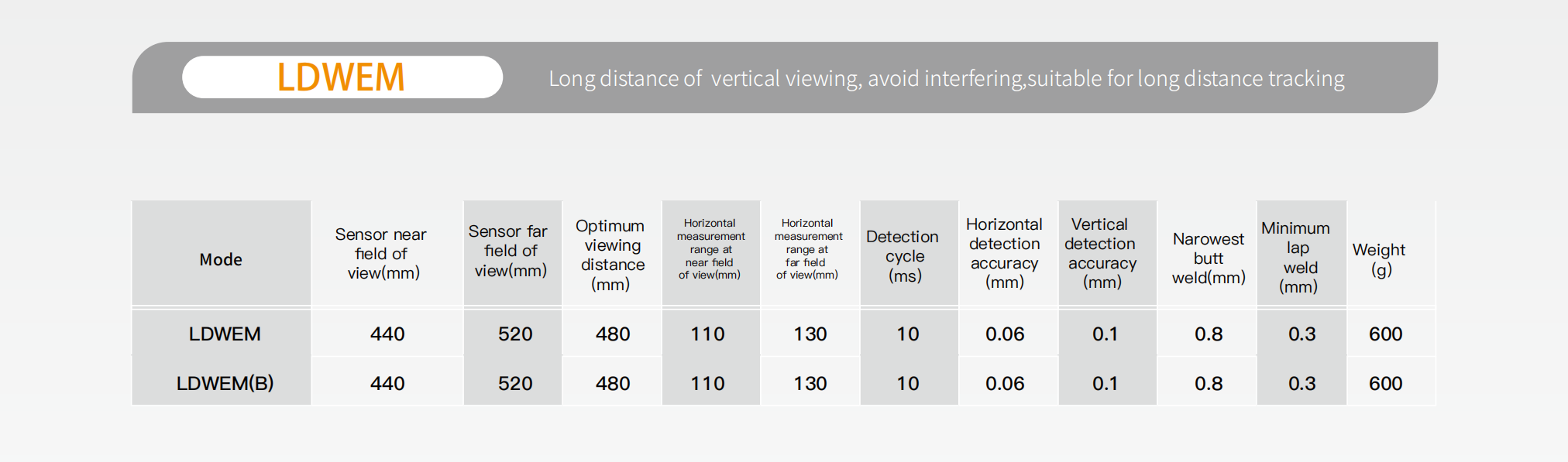
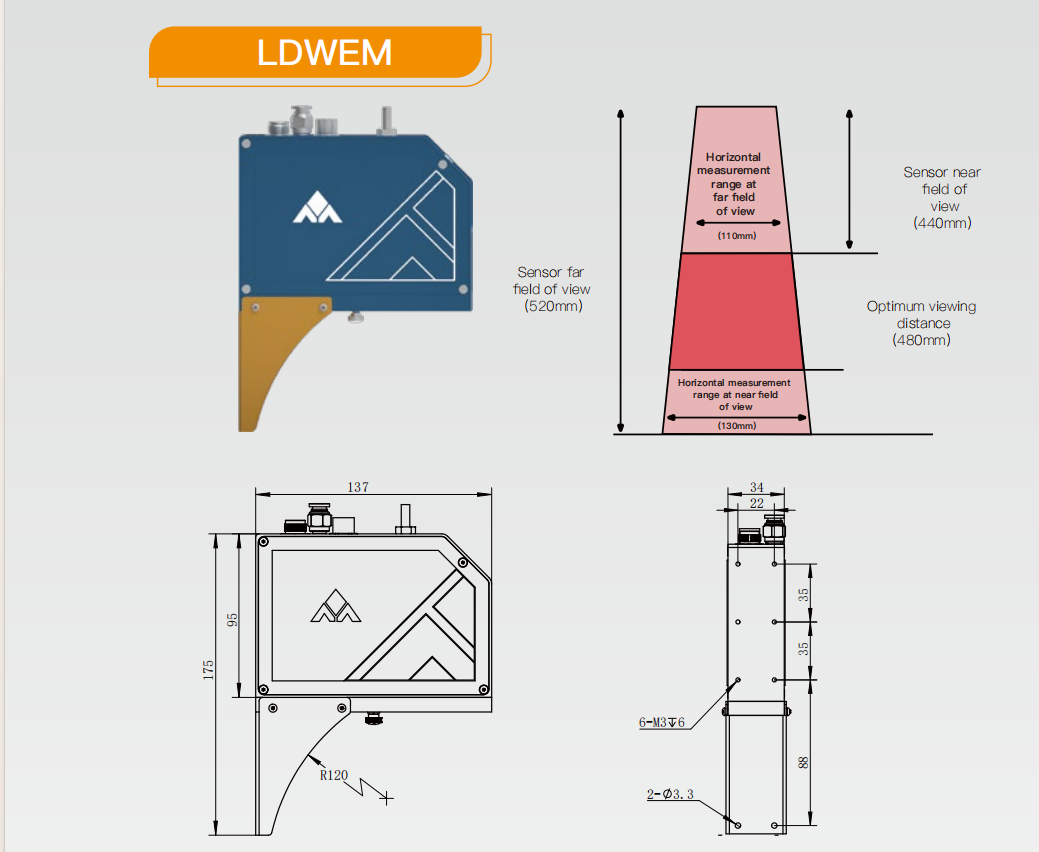
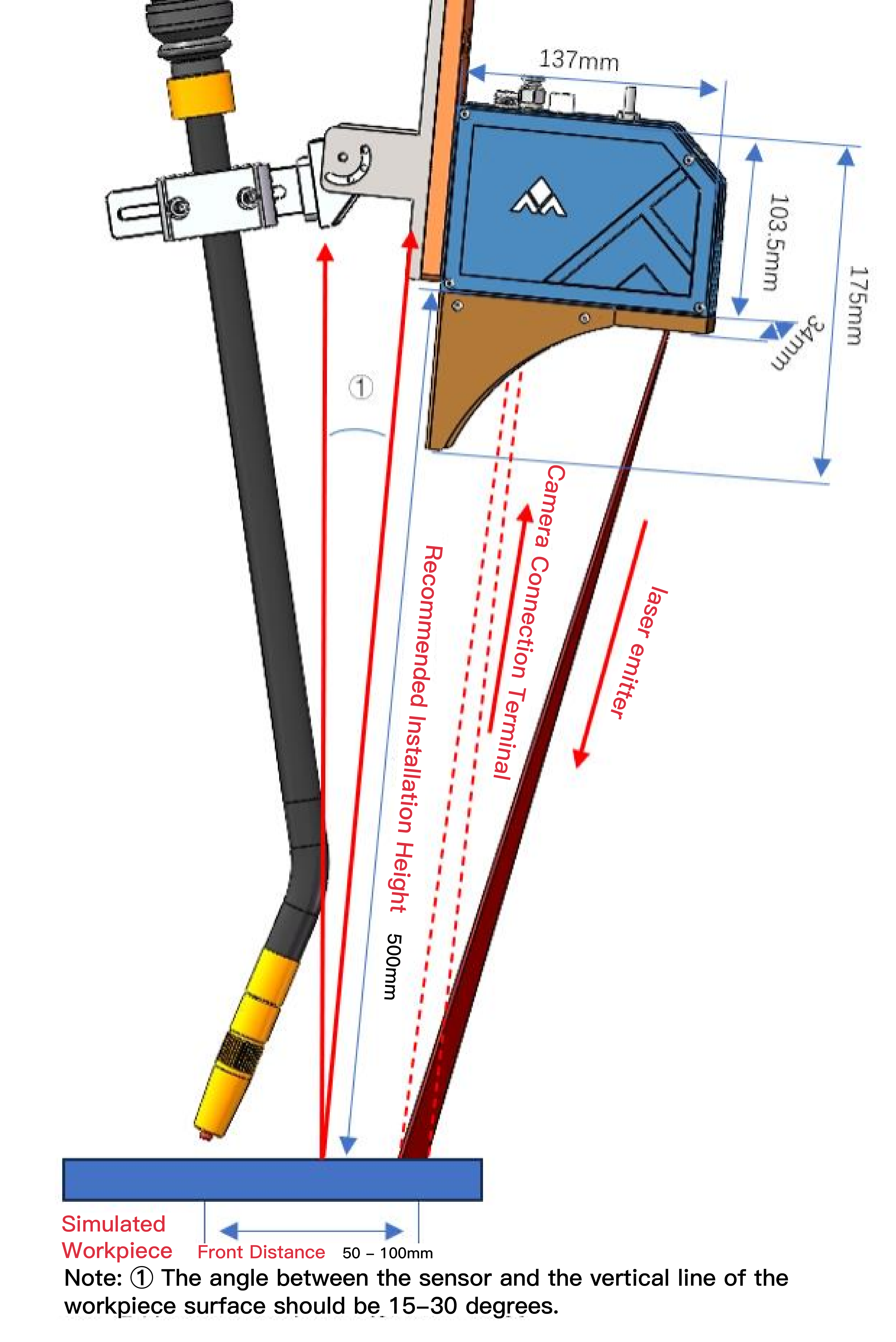
Distanta de observare optimală este de aproximativ 480 mm.
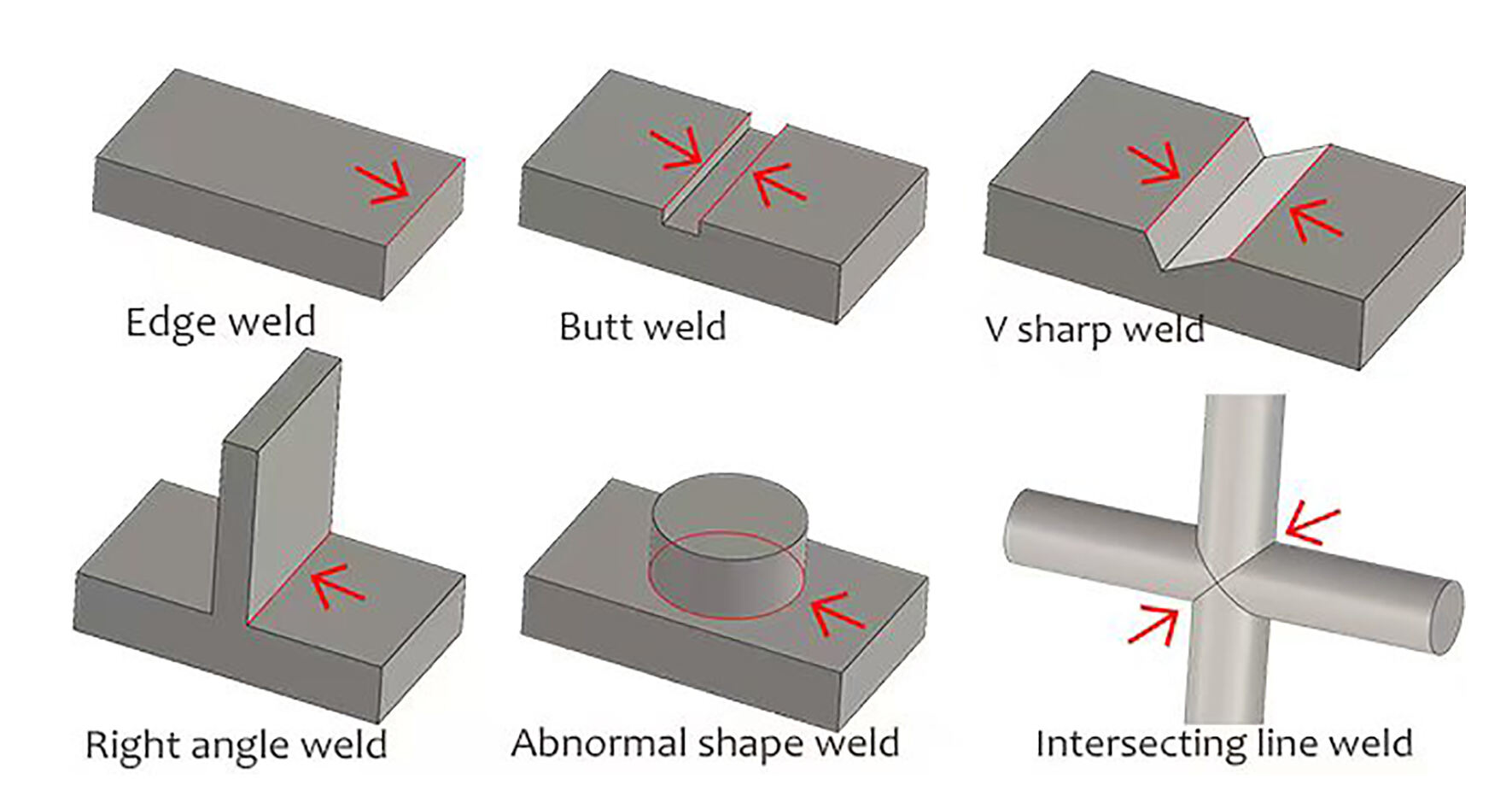
Tip suport pentru sudura
Sudura cu groara V
Sudura de colt
Sudura cu pliere
Sudura de spalier
Suderi suprapusi, etc.
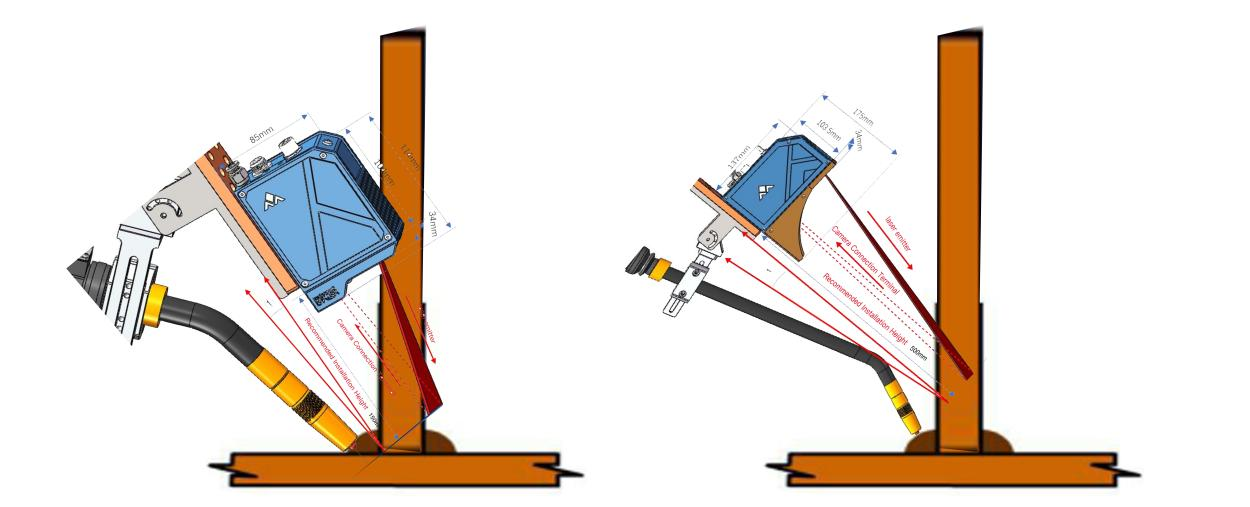
Distanța de vedere verticală lungă, vizualizare largă, evită interferențele, potrivită pentru industria Structurilor din Oțel și a Mașinilor de Construcții.
Vă rugăm să selectați tipul în mod rațional conform domeniului de aplicare real, pentru a evita coliziunea piesei de lucru cu senzorul; încărcarea robotică este de obicei de 20KG.
Partener Cooperant

Suport pentru marca de robot






