 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Robot Penyambung Pintar Gantry Struktur Keluli Tanpa Pengajaran

Robot Pengeleman Gantry Struktur Keluli
Peralatan ini adalah robot pengeleman khas untuk struktur keluli yang dirancang khas untuk pengeluaran automatik di kilang struktur keluli.
Peralatan ini adalah robot pengeleman khas untuk struktur keluli yang dirancang khas untuk pengeluaran automatik di kilang struktur keluli.
1. Peralatan ini terutamanya terdiri daripada: bahagian rel, bahagian gantri, bahagian penyesuaian robot, kotak kawalan elektrik, bahagian bekalan kuasa pengeleman, dll.
2. Komponen gantri terutamanya terdiri daripada bingkai pendorong, dawai lintang, bingkai penyesuaian, dll. Bingkai pendorong, dawai lintang dan bingkai penyesuaian semua menggunakan struktur penyambungan dawai kotak, dan kemudian mengalami rawatan pemulihan tegangan selepas penyambungan. Struktur ini padat dan kelihatan menarik.
3. Balang pendorong aktif keseluruhan mesin menggunakan pendorong servo AC Panasonic Jepun dan motor untuk memandu pengurangan SHIMPO Jepun, dan kemudian melalui penulenan gear dan pinion, roda pandu mengufuk dipasang di bahagian sisi balang pendorong. Roda pandu itu boleh ditekan ke atas rel pandu dengan menyelaraskan paksi eksentriknya, dengan itu memastikan kestabilan dan ketepatan operasi keseluruhan mesin.
4. Rel pandu bergerak troli semuanya dibuat daripada 38KG/M. Sisi luar rel pandu dilengkapi dengan gear yang telah dimesinkan dengan presisi. Gear ini terbuat daripada keluli 45 dengan modul 2.0. Kaedah pendorongan dua pihak digunakan. Rel pandu ditetapkan melalui pelat penutup pelari. Kaedah pemasangan ini boleh memastikan parameter teknikal penting seperti kerataan membujur dan kesejajaran dua rel pandu.
Kebangkaian kepada bukan pengajaran penyambungan pintar secara spesifik dibahagikan kepada import gambar 3D, pengekstrakan automatik jahitan penyambungan, penjanaan automatik trajektori penyambungan robot, visualisasi sikap, dan pengesanan automatik tabrakan pistol penyambung.
Penjanaan automatik trajektori penyambungan robot, visualisasi sikap, optimasi trajektori penyambungan, dan pengesanan automatik tabrakan pistol penyambung.
Dan tanpa jenis gambar, pemodelan songsang pindaian 3D, penghasilan pantas gambar 3D, penghasilan automatik trajektori penyambungan robot, optimasi trajektori penyambungan, visualisasi sikap, pengesanan automatik tabrakan penyambung.
Parameter
| Panjang Maksimum Bahan Kerja | 11m |
| Lebar Flange | 2.5m |
| Jarak rel pergerakan gantri | 2800 mm |
| Kuasa motor pergerakan gantri | 2x0.75 kW |
| Kelajuan penyambungan pergerakan gantri | 100-1000 mm/min |
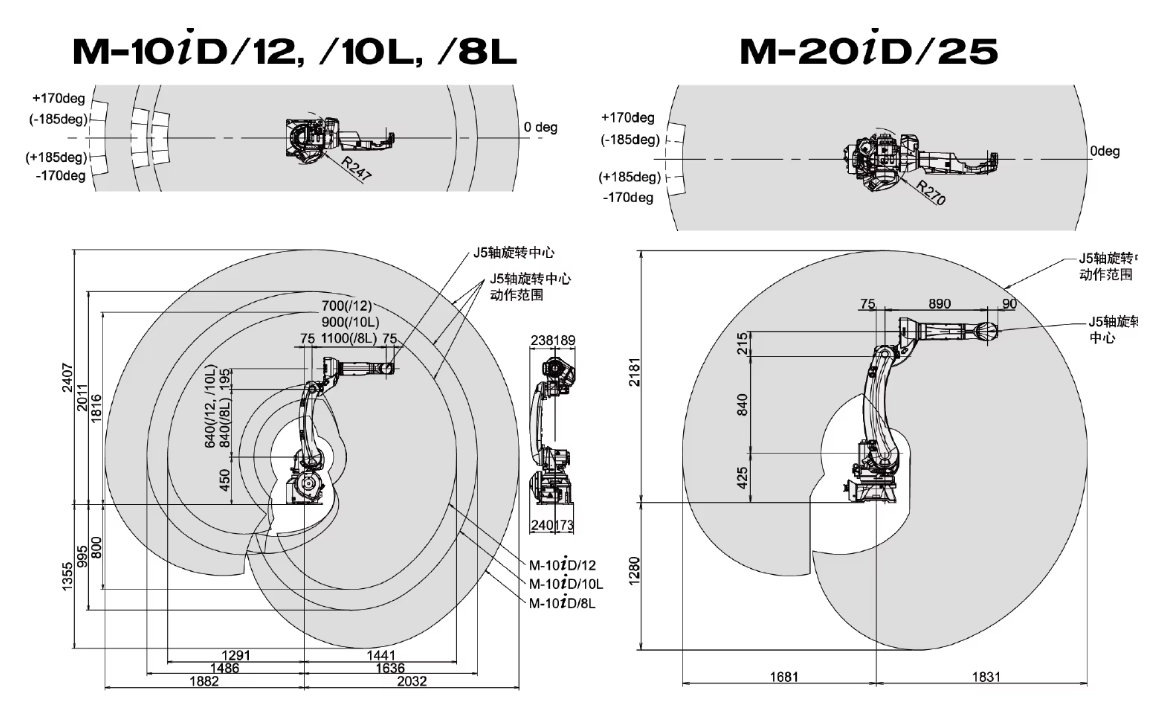
Robot pengelasan
Robot penyambung FANUC yang dikeluarkan di Jepun digunakan. Parameter robot spesifik adalah seperti berikut.
LDWEP-500 pelacak laser
LDWEP-500 adalah sensor pintar pemindaian garis untuk pengesan jahitan las. Ia memperoleh maklumat kontur bagi keratan jahitan las melalui pemindaian laser garis, dan membimbing robot atau mesin las untuk secara automatik menyiapkan proses las. Fungsi pengambilan imej, pemprosesan dan pengenalan jahitan las dilaksanakan di dalam sensor tanpa keperluan komputer luaran. Ia mempunyai tahap pengintegrasian yang tinggi dan mengurangkan kos perangkat keras keseluruhan sistem. Tahan terhadap cahaya busur dan percikan, mampu mengenal pasti jahitan las dengan pintar, dan mudah dalam pengendalian. Memiliki struktur yang teliti, saiz ringkas, aksesibiliti tinggi, dan pelbagai jenis. Boleh dipilih dan digunakan mengikut situasi aplikasi, dan parameter yang paling sesuai boleh disesuaikan.

Sumber Kuasa Las Struktur Baja H Beam 6-9 Paksi Stesen Robot Las China
Menggunakan sumber kuasa las Megmeet CM500: sebuah mesin las pintar CO2/MAG/MMA berindustri berat sepenuhnya digital. Ia digunakan secara meluas dalam pelbagai bidang pemprosesan las keluli karbon: pengangkutan rel, kereta, pembinaan kapal, struktur keluli, bekas kargo, mesin, peralatan keras dan industri lain, serta operasi beban berat dan persekitaran yang sukar.







