 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Stesen Robot Penyambungan Jenis Rel Bumi IIntelligent untuk struktur keluli

Robot las jenis rel tanah dilengkapi dengan sistem las berkepintaran Friendess non-teching dan penjejak jarak visual besar. Ia boleh mengimport fail model 3D dari Tekla, SolidWorks atau UG secara terus, menyepadankan parameter proses las secara langsung, mengenal pasti kedudukan las yang tepat secara automatik, dan menghasilkan proses las yang paling optimum untuk las.
Paksi pergerakan jenis rel tanah meningkatkan keluwesan dalam arah panjang. Robot boleh bersambung dengan rel tanah untuk melas sambungan yang lebih panjang pada satu masa, dan stesen kerja boleh beroperasi di kedua belah pihak rel. Ia digunakan terutamanya untuk melas pelat rusuk balok H, pelat tapak kolom, pelat penyokong kuda-kuda, konsol, dan struktur lainnya.
| Robot | 1 set robot Fanuc |
| Sumber kuasa las pilihan | Mesin las Aotai dan aksesori atau mesin las Megmeet dan aksesori |
| Sistem las | Perisian pemrograman luar talian tanpa pengajaran MINYUE, sistem penjejakan visi laser MINYUE. |
| Senario yang boleh digunakan | Sesuai untuk pelat gusset, bahagian corbel, bahagian struktur kecil, dll. Ia boleh digunakan kini dalam balok utama berbentuk H dan balok sekunder dalam struktur keluli, unit pelat kecil dan sederhana bagi jambatan kapal, kolom keluli berbentuk H peralatan, balok platform peralatan dan struktur lain. |
| Sistem pembersihan senapang | Sistem pembersihan senapang SC220A |
| Panjang rel lantai | 6 meter (pilihan mengikut pengguna) |
Sistem Pembersihan Senapang
Stesen pembersihan senapang SC220A adalah sebuah peranti untuk membersihkan senapang las robot. Ia digunakan untuk membersihkan secara automatik lasan senapang semasa las robot, memotong dawai secara automatik, dan melindungi mulut senapang serta hujung kontak, meningkatkan tempoh hidup senapang las dan mengurangkan kos. Menurunkan kos habisan, mengekalkan kualiti las yang baik, dan meningkatkan kecekapan las. Operasi mudah dan sesuai digunakan.
Kelebihan stesen pembersihan senapang: 1. Masa membersihkan senapang adalah pendek dan ketersediaan sistem adalah tinggi. 2. Secara automatik menyiapkan proses pembersihan senapang tanpa operasi manual. 3. Mengelakkan masalah kualiti yang disebabkan oleh pencemaran semasa penyambungan. 4. Dilengkapi dengan jarum kalibrasi TCP robot.
Perisian penyambungan robot
Perisian boleh secara automatik mengekstrak sambungan daripada gambar tanpa penandaan sambungan, mengurangkan beban kerja penyertaan manusia. Dengan enjin 3D cekap dan pengawal robot, titik-titik yang dicipta secara automatik disimulasikan dan diperiksa untuk mengelakkan tabrakan dalam kerja sebenar.
Dan tanpa jenis gambar, pemodelan songsang pindaian 3D, penghasilan pantas gambar 3D, penghasilan automatik trajektori penyambungan robot, optimasi trajektori penyambungan, visualisasi sikap, pengesanan automatik tabrakan penyambung.
Penjejak laser LDWP-305
LDWP-305 adalah pengesan jahitan las pintar yang menyapu garis. Ia memperoleh maklumat kontur bagi bahagian jahitan las melalui penyapuan laser garisan, dan membimbing robot atau mesin las untuk secara automatik menyiapkan proses las. Fungsi pengumpulan imej, pemprosesan dan pengenalan jahitan las dilaksanakan di dalam pengesan tanpa keperluan komputer luaran. Ia mempunyai tahap pengintegrasian yang tinggi dan mengurangkan kos keras keseluruhan sistem. Tahan terhadap cahaya busur dan percikan, secara pintar mengenal pasti jahitan las, dan mudah digunakan. Memiliki struktur yang teliti, saiz ringkas, aksesibiliti tinggi, dan pelbagai jenis. Boleh dipilih dan digunakan mengikut situasi aplikasi, dan parameter yang paling sesuai boleh disesuaikan.

Kelebihan
1.Mendukung pelaksanaan tanpa pengajaran untuk pelbagai produk seperti panel berlapis, balok trus, penyangga, pembahagian jambatan, dan piawai panel;
2.Tiada keperluan untuk menandakan sambungan las pada peringkat reka bentuk, dan kedudukan sambungan las target boleh diekstrak secara automatik dengan mengimport gambar 3D;
3.Tiada campurtangan manusia diperlukan, robot secara automatik menyiapkan tindakan seperti pulangan sifar, peralihan, mencari kedudukan, las, pengiraan, dan membersihkan senapang;
4.Tiada operasi di tapak diperlukan, program boleh dijana pada bila-bila masa dan tempat, dan dihantar secara jauh kepada robot untuk pengeluaran mengikut masa yang ditentukan;
5.Pemrograman luar talian sendiri, simulasi 1:1 gerakan robot, mengelakkan gangguan robot sebelumnya dan mengelakkan tabrakan;
6.Teknologi kembar digital boleh memaparkan trajektori robot di tapak, voltan las, arus, kelajuan dan maklumat pengeluaran lain secara real time.
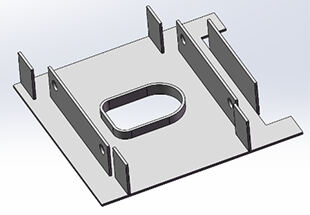
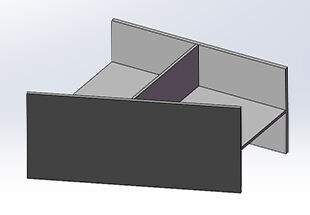
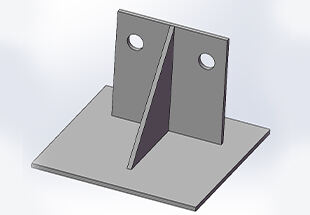
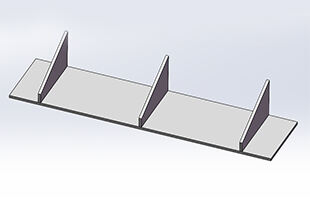
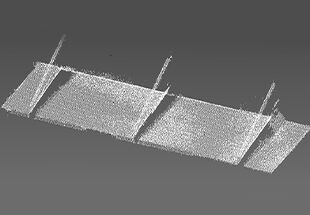
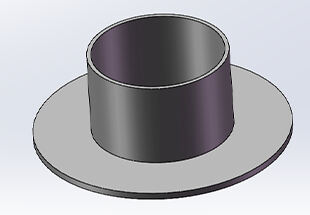
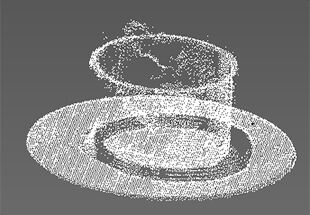
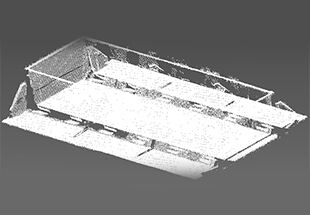
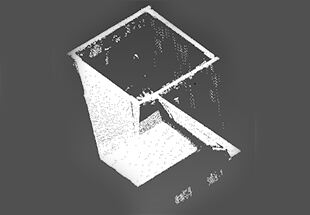
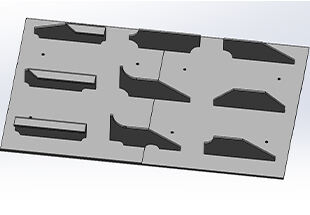
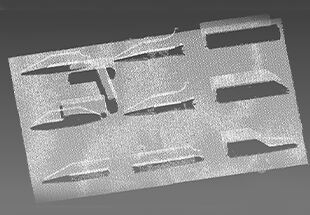
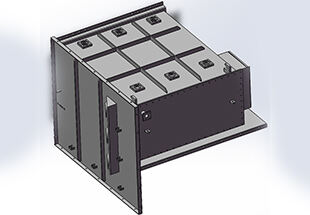
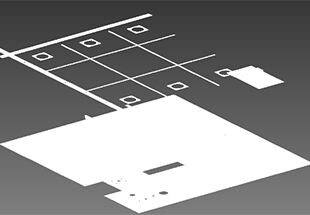
| Tidak | Jenis kerja | Imej model kerja | Imej awan titik kerja |
| 1 | H Beam (Termasuk sambungan las but) | 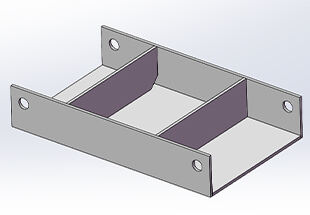 |
 |
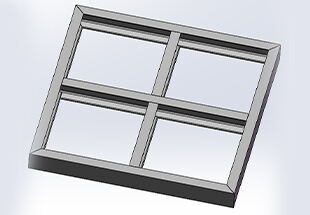
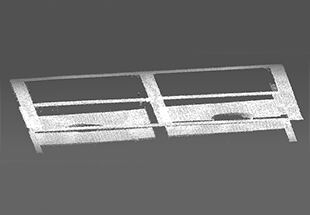
| 2 | Unit papan |
 |
 |
| 3 | Korbel Keluli |
 |
 |
| 4 | Bermeru |
 |
 |
| 5 | Papan penopang purlin |
 |
 |
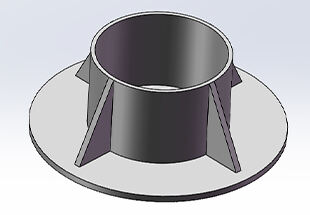
| 6 | Tapak paip bulat |
 |
 |
| 7 | Tapak paip bulat berbentuk salib |
 |
 |
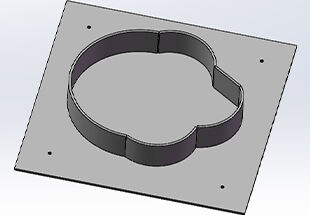
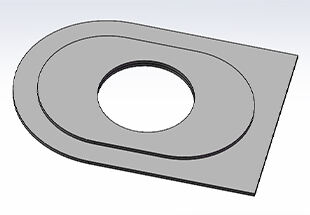
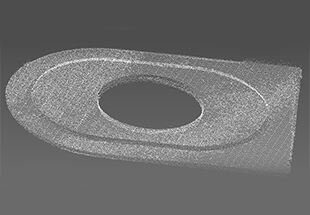
| 8 | Permukaan pelik |
 |
 |
| 9 | Papan dua lapis |
 |
 |
| 10 | Perakitan balok saluran |
 |
 |
| 11 | Sambungan lipat dua dilas | 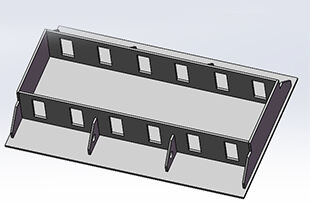 |
 |
| 12 | Girder kotak |
 |
 |
| 13 | Pengelasan bogel tak sekata |
 |
 |
| 14 | Tangki Transformator |
 |
 |





