Kā tiek izmantoti lasersensory distance mērīšanai un objektu noteikšanai? Tie izmanto lasus, kas ir kā nevidami lineāli, kas var mērīt lietas ļoti precīzi. Tādējādi, izmantojot lasersensory, mēs tagad zinām, cik tālu objekts atrodas no mums — ideālā gadījumā nav nepieciešams to skart vai izmantot parastu mēra lenti. Kā patiesībā darbojas lasersensors? Starojums atstaro atpakaļ uz sensoru, kad tas saskaras ar objektu. Pēc tam ar elektrisko vai elektrisko savienojumu zina, cik ilgi starojumam bija jāatgriežas. Tas stāsta mums, cik tālu ir objekts. Tas ir kaut kas līdzīgs tam, kā bakstari izmanto ekolokāciju, lai orientētos tumsā. Bakstari izplūst skaņas, un kad skaņas atgriežas, tie zina, kur atrodas apkārtējie objekti. Lasersensory sasniedz ko pavisam līdzīgu, tomēr viņi balstās uz gaismu, nevis uz skaņu!
Kad veido produktus fabrikās, kur tiek ražoti daudzi produkti, ir ārkārtīgi svarīgi būt precīziem. Problemas radās, kad mašīnas nedarbojas precīzi, neatrodoties tieši tur, kur tās vajadzētu. Lasersensory nodrošina, ka mašīnas griež un pārvieto daļas pareizajā vietā. Tāda veida precīzi lasījumi ļauj ražot produktus efektīvāk un precīzāk, kas ir būtiski nozarēs, kur pat mazie kļūdas var izraisīt lielas zaudējumus. Fabrikas izmanto augstas ātruma lasersensore precīzu ražošanu un atkritumu samazināšanu.

Attāluma mērīšanai, piemēram, koridoru garuma vai ēkas augstuma noteikšanai, mēs izmantojam rūpniecības lasersensors tie ir daudz precīzāki nekā standarta mērīšanas šķiedras. Ar laserdzinātāju var mērīt garas attālumus ātri un viegli. Tas arī ietaupa daudz laika un problēmu darbvietā, kur smagi mērīšanas iekārti traucē strādniekiem izpildīt savu darbu. Laserdzinātājiem ir augsta precizitāte, kas ļauj mums uzticēties sniegtajiem mērījumiem, tādējādi viņi kļūst par ļoti plaši izmantoto rīku dažādās situācijās.

Tāpēc roboti ir brīnišķīgi, jo tie var darīt to, ko mēs nevaram. Piemēram, tie var nonākt zonās, kas ir pārāk bīstamas cilvēkiem. Laserdzinātāji ļauj robotiem "redzēt", kas apkārt tiem atrodas, lai tie nesaskartos ar objektiem vai cilvēkiem. Tas ir kritiskais spēja, lai nodrošinātu drošību pacientu grupās. Ja robotam ir laserdzinātāja kamera tā sistēmā tas nozīmē, ka tā var būt droši, ka var kustēties, neuzkrītot uz objektu. Tas ļauj robotiem sadarboties ar cilvēkiem fabrikās, godās un pat slimnicēs, padarot tos ļoti noderīgus dažādās lomās.
Lazerzinātāju izmanto tik daudz inovatīvu veidu, ka dažus mēs pat varbūt neatceramies. Piemēram, tie ļauj autoņu automobiļiem redzēt citus transportlīdzekļus un novērst ceļu avārijas. Zinātāji ļauj automašīnām just, cik tuvu ir citi transportlīdzekļi, lai varētu pieņemt drošus vadības lēmumus. Tie arī tiek izmantoti veselības aprūpē, lai monitorētu pacientu dzīvības pazīmes, ne pieskārto tiem. Tas var būt īpaši noderīgi, kad pārvalda pacientus, kas var būt saistīti ar slāpekļa apstākļiem vai prasa aizsardzību no patogēnu.
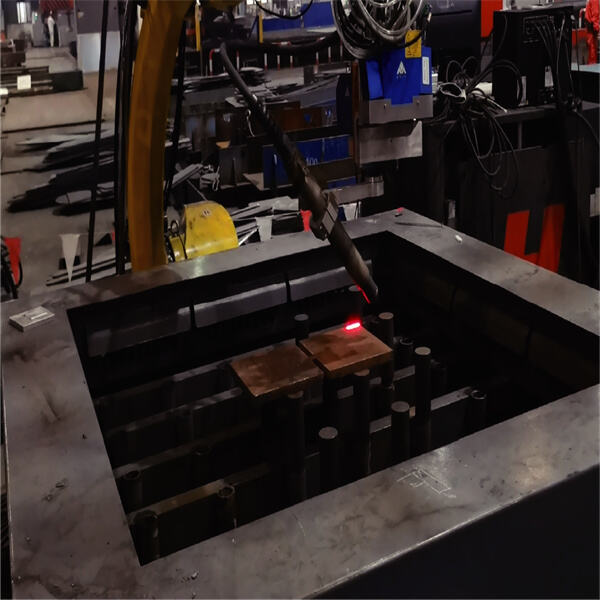
Pieņemot funkciju meklēšanai un uzsekošanai, skenējot svārku līnijas, apstiprinot svārku līnijas pozīciju un informāciju, koregujot svārku līnijas pozīciju starp 3D digitālo modeli un faktisko darbību, risinot problēmu ar novirzi, kas radusies materiālu kļūdu un termiskās deformācijas dēļ.
Beijing Minyue Technology Co.,LTD, kā pasaules vadošā augsttehnoloģiju uzņēmuma robotiku neatmiņošajā intelektuālā lietojumprogrammu jomā. Mēs specializējamies elastīgā intelektuālā ražošanā, izmantojot mūsu pašu izstrādāto RobotSmart - Intelektuālo Lēmumu Sistēmu, SmartVision - Divu Acu Strukturālā Gaismas Redzamības Sistēmu un SmartEye - Lazerredzamā Jostu Sekojanas Sistēmu. Mēs piedāvājam jaunu paaudzi intelektuālu robotu svārkošanas un griešanas risinājumu.
Ātri, precīzi, pilnīgi Bez-Programmēšanas, ar augstu efektivitāti un precizitāti. Tas risina tradicionālo robotu sarežģīto apmācības procesu un saglabā apmācības procesa pārtraukumu.
Sniedz spēcīgus svārkošanas robotus ar priekšielādi, malas ielādi, apgrieztu ielādi, jumta montāžu, intelektuālu trajectoru plānošanu vairākiem robotiem, vairākiem ārējiem ass un pozicionētāju sadarbību. Sasniedz robotu kustības simulāciju, satiksmes noteikumu pārkāpumu noteikšanu, vienības izvairīšanos un ass robežu noteikšanu.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








