 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Nemokama geležies konstrukcijų portovo intelektinė suvilkimo robotas

Stalo konstrukcijos herkštinis suvienodinimo robotas
Šis įrenginys yra specialus stalo konstrukcijų suvienodinimo robotas, sukurtas automatizuotai gamybai stalo konstrukcijų fabrikose.
Šis įrenginys yra specialus stalo konstrukcijų suvienodinimo robotas, sukurtas automatizuotai gamybai stalo konstrukcijų fabrikose.
1. Įrangą sudaro: vamzdžio dalys, herkštinės dalys, robotų reguliavimo dalys, elektros valdymo dėžutės dalys, suvienodinimo šaltinių dalys ir kt.
2. Herkštinių komponentų pagrindinė sudedamoji dalis yra varomasis rėmuo, kryžminis juostas ir reguliavimo rėmuo. Varomojo rėmlio, kryžminio juostos ir reguliavimo rėmlio visi naudoja dėžės juostos suvienodinimo konstrukciją, o po suvienodinimo jie undergo streities panaikinimo apdirbimas. Konstrukcija yra kompaktiška, o išvaizda graži.
3. Aktyvus važiavimo galinis virsmas viso aparato naudoja japoninę Panasonic AC servoprivatą ir variklį, kad sukeltų japoninį SHIMPO reductorius, o paskui per čiaurą ir dantį transmisiją. Po to, horizontalus vadovaujantis ratas yra montuotas aktyvaus galinio virsmo krante. Vadovaujantis ratas gali būti paspaudžiamas ant vadovaujančios kelyje reguliuojant jo ekscentrinį ašį, tuo tikru atveju užtikrinant viso aparato veikimo stabilumą ir tikslumą.
4. Keleivinio judečio vadovaujantys raštai yra visi pagaminti iš 38KG/M. Vadovaujantys raštai yra apminkti sudaromaisiais dantimis. Dantis yra pagamintas iš 45 plieno su moduliu 2.0. Naudojamas dviejų pusų varomasis būdas. Vadovaujantys raštai yra fiksuojami per spaudinio palašus. Šis montavimo būdas gali užtikrinti svarbias technines parametrus, tokias kaip ilginis tiesrumas ir lygiagrečumas tarp dviejų vadovaujantų raštų.
Parama neprofesionalaus sudėtingo varžymo yra specifinai padalinta į brėžinių tipą: 3D brėžinio importavimo, suvaržymo jūros automatinį ištraukimą, robotų varžymo trajektorijos automatine generavimą, būsenos vizualizaciją, automatinę varžymo antenos susidūrimo aptikimą.
Robotų varžymo trajektorijos automatins generavimas, būsenos vizualizacija, varžymo trajektorijos optimizavimas, automatinis antenos susidūrimo aptikimas.
Be brėžinio tipo, 3D skenavimas atvirkštiniam modeliavimui, greitas 3D brėžinių generavimas, automatinių robotinių tarimo trajektorijų generavimas, tarimo trajektorijų optimizavimas, būsenos vizualizacija, automatinis tarimo šoninio elementų sutrikimų aptikimas.
Parametras
| Dirbtinio elementų maksimalus ilgis | 11M |
| Flangės plotis | 2.5M |
| Portalo judėjimo railiai | 2800 mm |
| Portalo judėjimo variklio galia | 2x0.75 kW |
| Gantry judėjimo suveldymo greitis | 100-1000 mm/min |
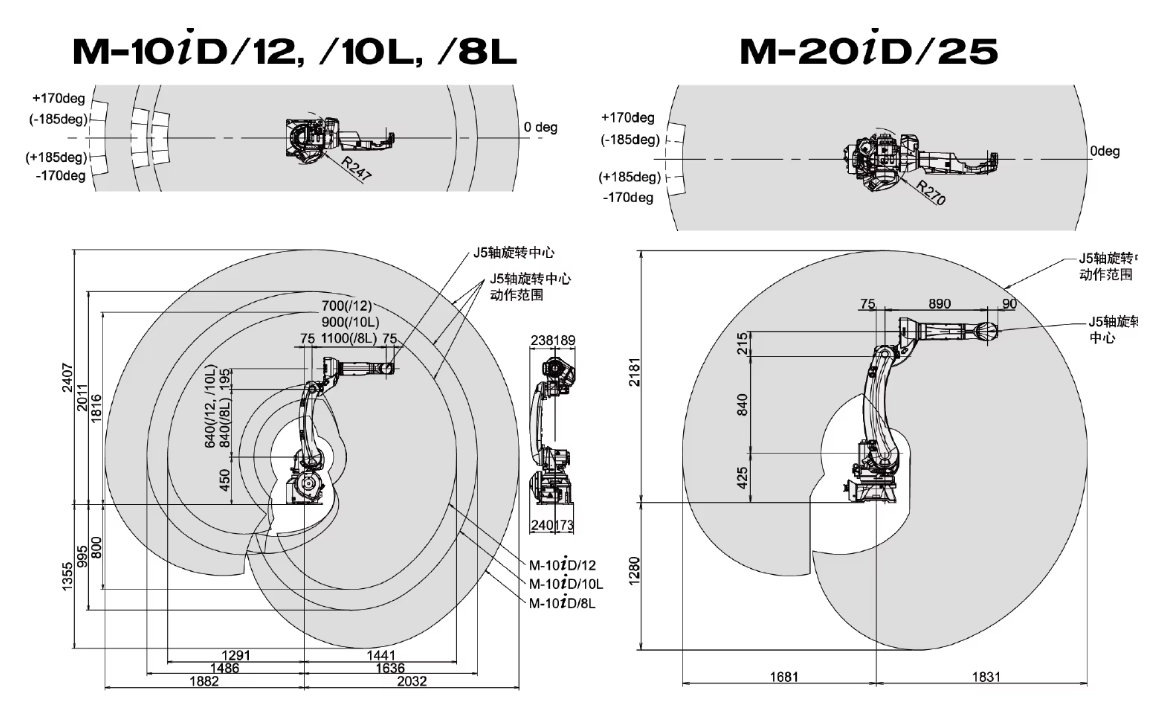
Varno robotui
Naudojamas Japonijoje gamintas FANUC suveldymo robotas. Konkrečios roboto parametrai yra tokie.
LDWEP-500 laserinis seklys
LDWEP-500 yra inteligentinis linijinių skenavimų suveldymo jūros jūrio jutiklis. Jis gauti suveldymo jūrio skyriaus kontūrą per linijinį laserio skenavimą ir vadovauja robotui arba suveldymo mašinai, kad automatiškai baigtų suveldymą. Vaizdo gavybos, apdorojimo ir suveldymo jūrio identifikavimo funkcijos atliekamos jutiklyje be išorinio kompiuterio. Jis turi aukštą integraciją ir sumažina sistemos bendrąją aparatinę kainą. Atsparus lankščiai ir šilam medžiagai, inteligentingai identifikuoja suveldymo jūrius ir yra paprastas valdyti. Jis turi elegantišką konstrukciją, kompaktinius matmenis, didelį prieigumą ir daugybę tipų. Galima pasirinkti ir naudoti pagal taikomą scenarijų bei sutelkti optimalius parametrus.

Sudėtinio plieno konstrukcijos pramonės H balandžio 6-9 ašių varžymo robotinė stotis Kinijoje
Naudojant Megmeet CM500 varžymo jėgos šaltinį: visiškai skaitmeninę pramoninę sunkiosios našumos CO2/MAG/MMA inteligentinę varžymo mašiną. Ji plačiai taikoma įvairiuose anglies plieno varžymo apdorojimo srityse: geležinkeliniuose transporto priemonių, automobilių, laivų statybos, plieno konstrukcijų, konteinerių, mašinų, gaminų ir kitose pramonės srityse, taip pat sunkios našumos ir griežtose aplinkosaus darbams.







