EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Nėra programos Inteliginčiojo Robotinio Suvaržymo Stoties
“Beijing Minyue Technology Co., Ltd ”Kaip Kinijos vamzdinė aukštosios technologijos įmonė, skirta ne- įmokslas robotų pramoninio intelekto . Koncentruojasi į lankstų gamybą naudojant savo kūrų RobotSmart – intelektinę sprendimų priėmimo sistemą, SmartVision – dviejų akinių struktūrinio šviesos vaizdų sistemą, SmartEye – laserinį sutinkamojo sekimo sistemą, teikiant naują kartą intelektinių robotų nemokomų suvienodinimo ir pjovimo sprendimus.
Mūsų įmonė turi tarptakominių magistrantų ir doktorantų bei techninių ekspertų iš grafikos ir automatizavimo sričių kūrinių grupę. Daugiau nei 90 % jų turi magistro arba aukštesnę išsilavinimą.
Specializuojamės robotų valdyme, algoritmų kūryboje ir žmogaus-roboto sąveikoje, siekdami suteikti geresnius robotikos inteligentingus sprendimus globalinei gamybos pramonei.
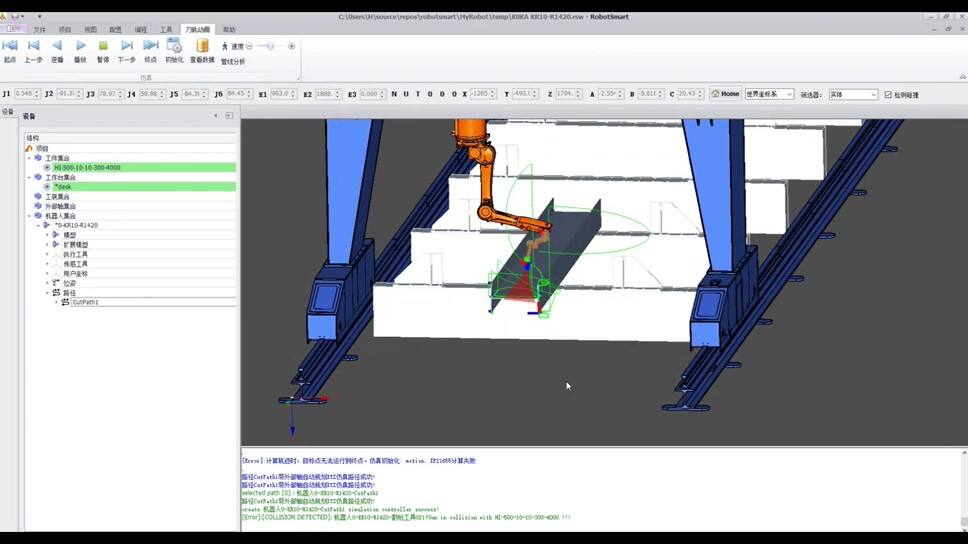
Kai vartotojas importuoja 3D darbo detalės modelį į RobotSmart – inteligentinę sprendimų sistemą, programinė įranga gali greitai ir automatiškai sugeneruoti pramoninių robotų judesio kodą, tuo pačiu realizuojant robotų judesio simuliaciją, sukimų aptikimą, kelių planavimą aplenkiant prekštas, vienatvižių išvengimą ir ašių ribų aptikimą bei kitas funkcijas, kad būtų išvengta tradicinių sudėtingų ir neefektyvių rankinio mokymo programavimo procesų.
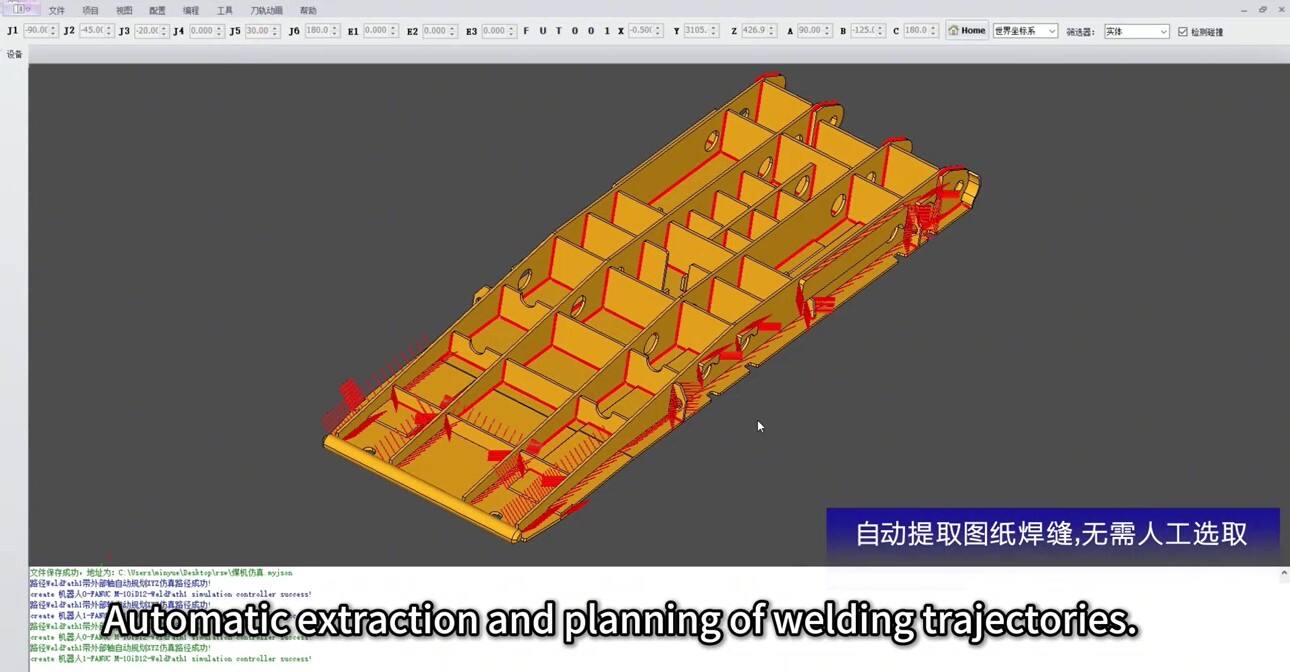
Kreipiantis naują linkme, spręsdami pramonės problemų taškus.
Anglinės mašinų pramonės hidraulinis parama suvaržymo problemos, paveikiančios pramoninę modernizaciją
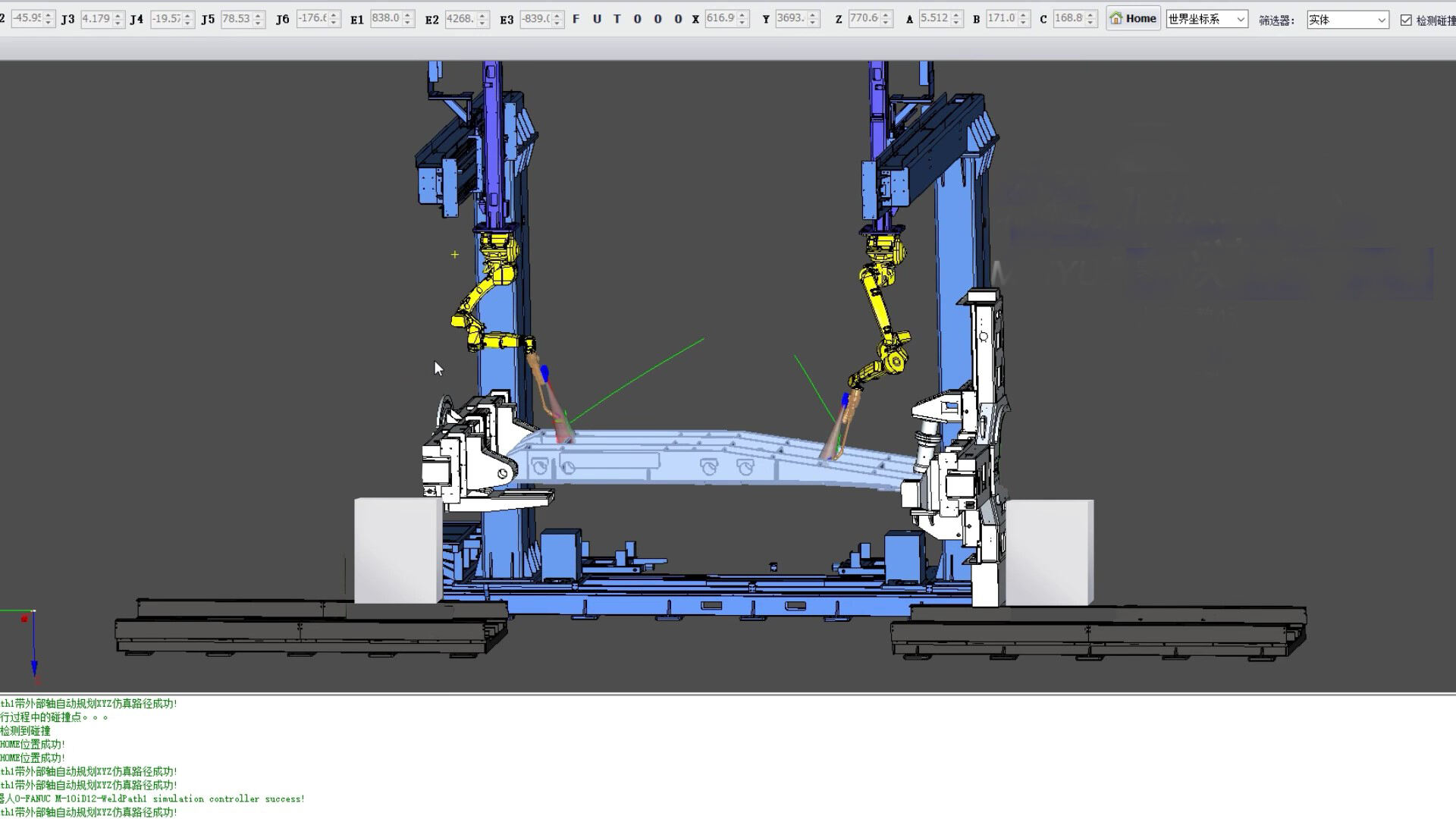
Populiariai naudojamų anglinės mašinų pramonėje hidraulinių palaustų pagrindinių konstrukcinio tipo dalių svoris gali viršyti 20 tonų. Dauguma jų yra iš vidutinio-stiprumo lypų sujungtų dėžių formos konstrukcinės dalys. Tai yra pagrindinė hidraulinio palausto dalis, kuria atkyla sunkūs apkrovos ir smūgių momentai. Hidrauliniai palaustai yra dominuojami trumpais, trimačiais kryžminiais suvaržymais.
Daugiau nei 1000 suvaržymų .ir dauguma jų yra daugiakilpė daugiaputė medium-stenklių lankstų sujungimų varžymas. Varžos jungtis yra tanki, su blogia varžymo prieinamumu, o jos varžymo kokybė tiesiogiai paveikia darbo paviršiaus saugų gamybos procesą.
Dėl jo struktūros specialumo ir technologijos sudėtingumo, rankinis varžymas negali užtikrinti varžymo stabilumo ir varžymo kokybės sutapimo.
Naudojant konvencinį robotinio varžymo metodą.
- Įmokslas programavimas, r reikalauja stovėjimo laiko bei mažo robotų naudojimo efektyvumo.
- Struktūra yra sudėtinga, su rėmimo rėmimaisis rėmimais skirtingų dydžių bei daugiau nei tūkstantimi varžomų vietų, reikia truksta 5 dienas, kad įmokslauti rankiniu būdu sukurtų programą.
- Dėl darbo detalės pozicionavimo ir montavimo tikslumo, kuris nesilaiko reikalavimų, bei dėl termalinių deformacijų, kilusų dėl lokalios sudedamųjų dalies suvilkimo, kilusios dėl centralizuoto suvilkimo, yra sutrikusio suvilkimo atstumas.
- Ypač sunku įgyvendinti robotinę suvilkos automatizaciją viso hidraulinio sistemos apimtuve. parama struktūros detalės.
Įmonė, kurios veikla susijusi su anglies technologijomis, pritaikė Minyue Technologijos vieno mygtuko paleidimo, nemokomojo intelektinio suvilkos sprendimo.
Žingsnis 1: Mūsų klientas importuoja 3D darbo detalės modelį į RobotSmart - Intelektinę Sprendimų Sistema.
Žingsnis 2: RobotSmart – inteligentinis sprendimų priėmimo sistema, kuri gali greitai ir automatiškai sugeneruoti pramoninių robotų trajektoriją, tuo pačiu įgyvendindama robotų judesio simuliaciją, sutrikimų aptikimą, vienavertės išvengimą ir ašių ribų tikrinimą.
Žingsnis 3: SmartVision-3D binocularinis struktūrizuotas šviesos matavimo sistema atlieka darbo objekto apytikslinį pozicionavimą. 3D binocularinis struktūrizuotas šviesos matavimo sistema skenuoja darbo objekto paviršių ir atlieka atvirkštinę modeliavimą iš taškinių duomenų. Atkuria darbo objekto paviršiaus charakteristikas su modeliavimo tikslumu viduje ± 5 mm. Tyrimo tikslumas susietas su montavimu ir pradiniu darbo objekto pozicionavimu viduje 40 mm ,Nustato montavimo kampą viduje 10 °. Nustato sviedinio ilgio pokyčius viduje 30 mm (pajustomas) 。
Žingsnis 4: SmartEye - laserinė matavimo sekimo sistema. Skenuojant sviedinio jūklą, patvirtinamas sviedinio padėtis ir informacija, kurianti pataisymus tarp 3D skaitmeninio modelio ir faktinio darbo objekto sviedinio padėties, gauti faktinę sviedinio padėties duomenis. Palaiko daugelį robotų, daugelį išorinių ašių ir pozicionieriaus suderintą darbą.
SmartVision-3D binocularinis struktūrizuotas šviesos matavimo sistema importuoja 3D modelius ,Gautų 3D taškinių duomenų lyginimas su 3D skaitmeniniu modeliu ,Robotas suveldo tik naudodamas 3D taškų debesies duomenis. Kai taškų debesies duomenys, gauti iš jutiklio, sutampa su 3D modeliu po darbo objekto modernizavimo naujais komponentais, modernizuoti komponentai yra suveldomi.
Tikroviškai realizuoti vieno mygtuko paleidimą, 2 minučių pertrauka pradėti lankų generavimą, greitai, tiksliai, visiškai be programavimo, aukšta efektyvumas ir tikslumas.
Technologija vadovauja, pramone dėmesį skiria.