 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Dangrio riešuto tipas Intelligent Suvienodinimo Robotas stalo konstrukcijoms

Robotas su žeminiu ratais ir suvaržymo sistema yra apgintas inteligentiniu Friendess ne-technologiniu varomuoju sistemų kompleksu bei dideliu vizualiojo atstumo šovinės sekos sekimo sistemoje. Galima tiesiogiai importuoti Tekla, SolidWorks arba UG 3D modelio failus, tiesiogiai pritaikyti varomuosius parametrus, automatiškai nustatyti tikslų varomosios vietos padėtį ir sugeneruoti optimalią varomąją procedūrą.
Žemutinis ratai tipo judesio ašis padidina ilgio krypties pritaikomumą. Robotas gali būti susietas su žemutiniais ratais, kad vienu metu varytų ilgesnius sutinkamujus, o darbo stotis gali dirbti po abiejose rato puses. Pagrindiniu tikslu yra H-formos balandžių ribinės plokštės, stiprintuvų pagrindo plokštės, sparno palaikymo plokštės, konsolių ir kitų konstrukcijų varymas.
| Robotas | 1 Fanuc robotas |
| Pasirinktinis varomasis įrenginys | Aotai varomoji mašina ir jos priedai arba Megmeet varomoji mašina ir jos priedai |
| Varomasis sistemą | MINYUE mokymosi nepriklausanti nuotolinė programavimo varomoji programa, MINYUE laserinė vizulinė sekimo sistema. |
| Taikymo scenarijai | Tinkamas rankenelių plokščių, konsolių dalių, mažų konstrukcinio tipo dalių ir pan. Šiuo metu jis gali būti naudojamas geležies konstrukcijose, H formos pagrindiniuose ir antriniuose baltais, laivyno tiltuose esančiose vidutinėse ir mažose plokštėse, įrenginio H formos geležies stulpeliuose, įrenginio platformos baltais ir kitose konstrukcijose. |
| Ginklo valymo sistema | SC220A ginklo valymo sistema |
| Žemės rieblio ilgis | 6 metrai (pasirinktinai pagal vartotoją) |
Ginklo Valymo Sistema
SC220A ginklo valymo stotis yra prietaisas robotinio suvienijimo ginklams valyti. Jis naudojamas automatiškai valyti suvienijimo ginklo šlamą per robotinį suvienijimą, automatiškai iškirpti laidus, apsaugoti suvienijimo ginklo burnelį ir kontaktinį galą, pratęsti ginklo našumą bei užtikrinti sąnaudų sumažinimą. Jis padeda išlaikyti gera suvienijimo kokybę ir pagerinti suvienijimo efektyvumą. Paprasta operacija ir lengvas naudojimas.
Priežastys turėti ginklo valymo stotį: 1. Ginklo valymo trukmė yra trumpa, o sistemos prieinamumas yra aukštas. 2. Automatiškai baigiamas ginklo valymo procesas be rankinio veiksmo. 3. Galima išvengti kokybės problemų, sukeltų tarimui kenksmingais teralais. 4. Pagrebtas robotiniu TCP derinimo jūklu.
Robotinio tarimo programinė įranga
Programinė įranga gali automatiškai ištraukti tarimus iš brėžinių be tarimo žymių, sumažindama rankinio dalyvavimo darbo apimtį. Su galingu 3D varikliu ir robotinio valdiklio, automatiškai sukurti taškai yra simuliavimi ir patvirtinami, kad būtų išvengta sutrikimų tikrojoje dirbamoje aplinkoje.
Be brėžinio tipo, 3D skenavimas atvirkštiniam modeliavimui, greitas 3D brėžinių generavimas, automatinių robotinių tarimo trajektorijų generavimas, tarimo trajektorijų optimizavimas, būsenos vizualizacija, automatinis tarimo šoninio elementų sutrikimų aptikimas.
LDWP-305 laserinis seklys
LDWP-305 yra inteligentus linijinių skenavimo suveldymo jūros jutiklis. Jis gauti kontūrinius duomenis apie suveldymo jūros skerspjūvį naudojant linijinį laserinį skenavimą ir vadovauja robotui arba suveldymo mašinai, kad automatiškai baigtų suveldymo procesą. Vaizdo gavybos, apdorojimo ir suveldymo jūros identifikavimo funkcijos atliekamos jutiklyje, o ne reikalaujant išorinio kompiuterio. Jis turi aukštą integruotumą ir sumažina sistemos bendrąją aparatinės įrangos kainą. Atsparus elektrodų šviesai ir dregliams, intelligentiniai identifikuoja suveldymo jūras ir yra paprastas valdyti. Jis turi stilingą konstrukciją, kompaktinius matmenis, didelį prieigumą bei daugybę tipų. Galima pasirinkti pagal taikymo scenarijų ir sutelkti tinkamiausius parametrus.

Priežastis
1. Palaiko neprogramuojamą veikimą su įvairiais produktais, tokiais kaip sandučiniai lapai, trusos balandžiai, riestinės, tiltų skydeliai ir lapo statiniai;
2. Nėra jokios poreikio žymėti sujungimų dizaino etape, o tikrasis sujungimo vieta gali būti automatiškai ištraukta importuojant 3D piešinius;
3. Nepriklauso nuo žmogaus įsikišimo, robotas automatiškai atlieka veiksmus, tokius kaip nulio grįžimas, perėjimas, vietos surinkimas, sujungimas, skaičiavimas ir pučių valymas;
4. Nerėka vietinio veiksmo, programa gali būti sugeneruota bet kada ir bet kur, o toliau siunčiama robotui gamybai pagal nurodytą laiką;
5. Savitarnos programavimas, 1:1 roboto judesio modeliavimas, iš anksto išvengia roboto sutrikimų ir kolizijų;
6. Skaitmeninė dvinaris technologija gali realiu laiku rodyti vietinius roboto trajektorijas, sujungimo voltą, srovę, greitį ir kitus gamybos duomenis.
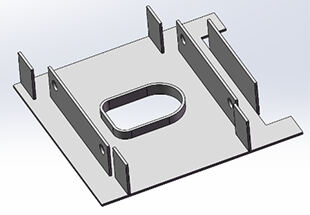
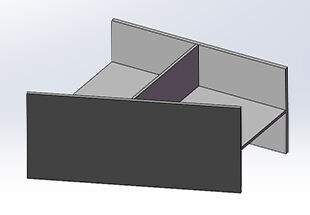
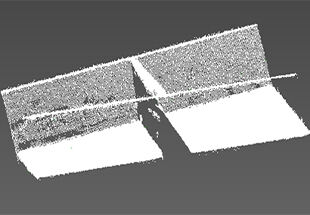
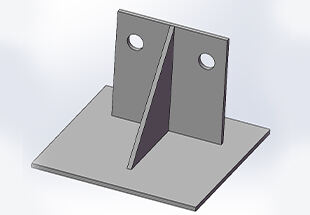
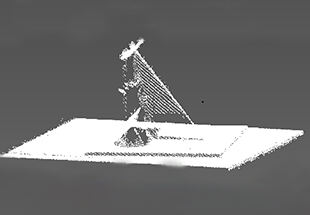
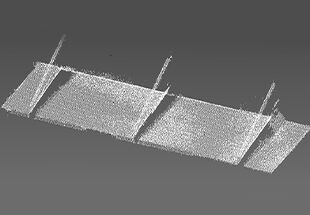
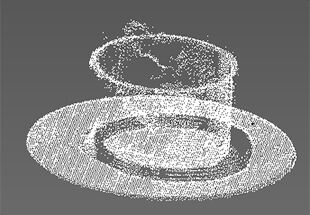
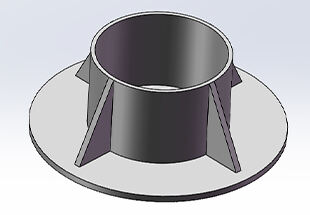
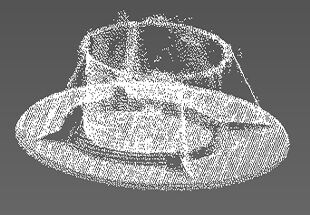
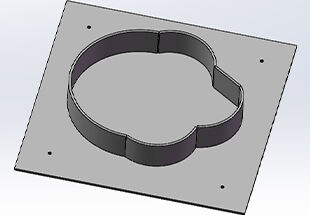
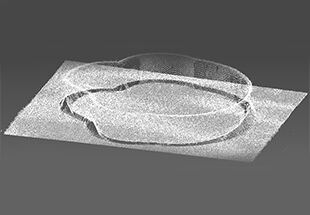
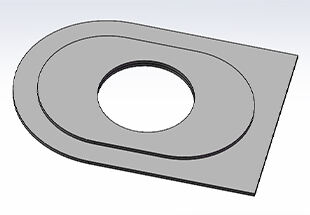
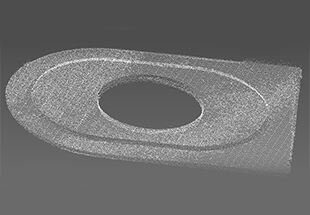
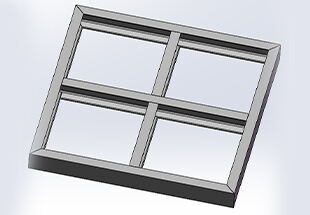
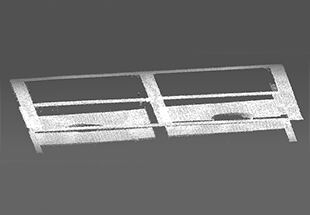
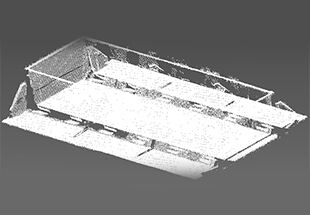
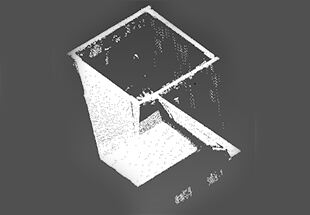
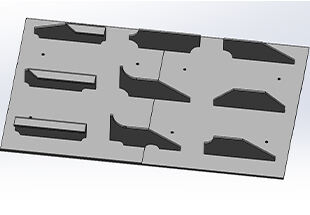
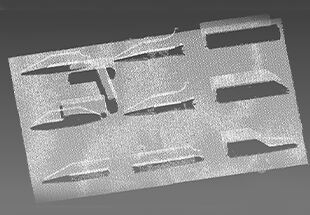
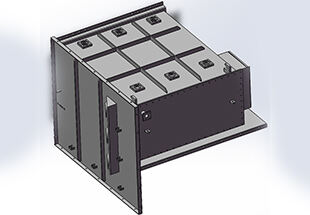
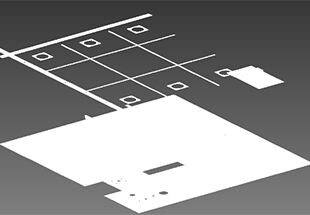
| Ne | Darbo objekto tipas | Darbo objekto modelio vaizdas | Darbo objekto taškų debesies vaizdas |
| 1 | H balandis (įskaitant junginius sujungimus) | 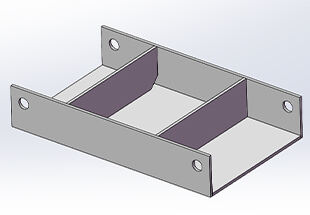 |
 |
| 2 | Plačioji vieneta |
 |
 |
| 3 | Geles korbelis |
 |
 |
| 4 | Bastūnės formos |
 |
 |
| 5 | Pilvežio palaikymo plokštė |
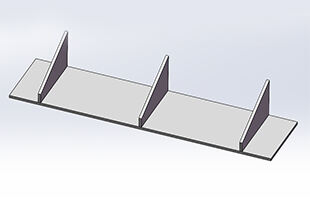 |
 |
| 6 | Apskritusis tubas pagrindas |
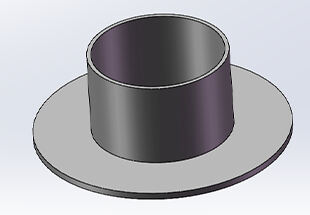 |
 |
| 7 | Kryžminis apskritasis tubo pagrindas |
 |
 |
| 8 | Alieno paviršius |
 |
 |
| 9 | Dviejų sluoksnių plokštė |
 |
 |
| 10 | Kanelinės struktūros montavimas |
 |
 |
| 11 | Dvigubai suvaržytas jungtis | 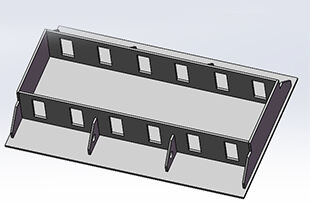 |
 |
| 12 | Dėdino gijos |
 |
 |
| 13 | Netipinio lankymo suvienodinimas |
 |
 |
| 14 | Transformatoriaus ruožtas |
 |
 |





