EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


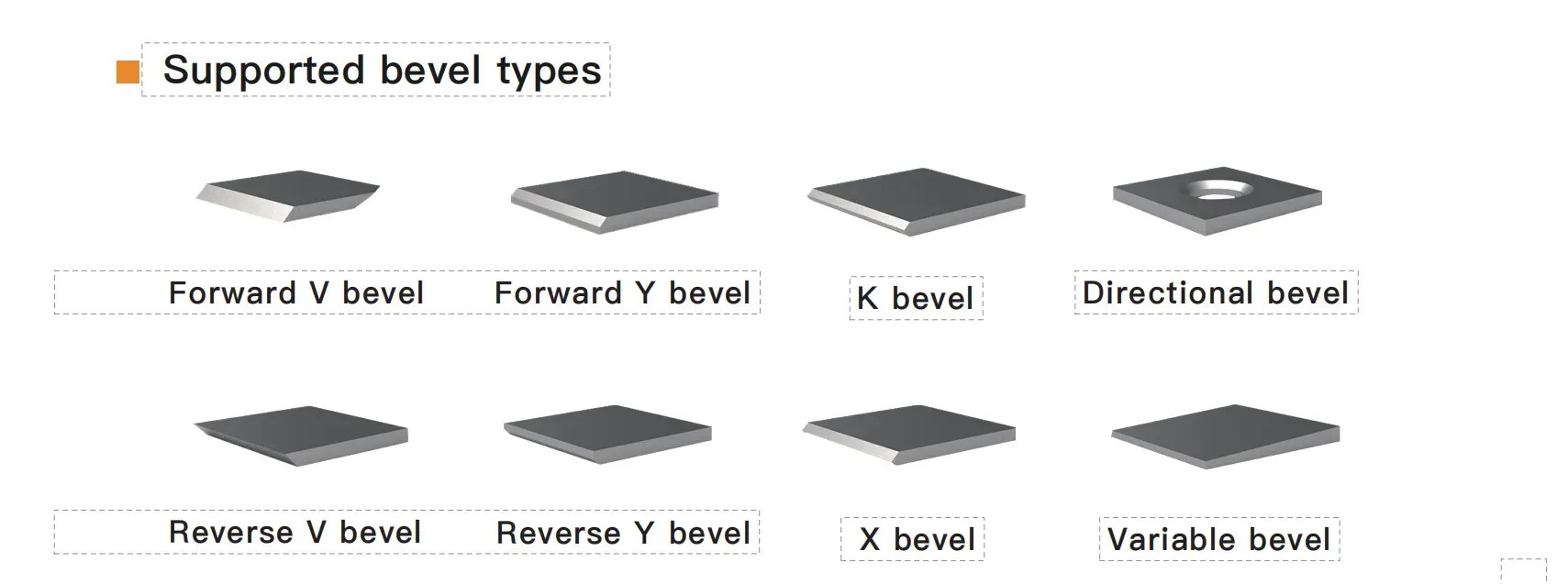
Be programavimo inteligentus kampinis pjūvio roboto stotis
Kampinis pjūvis Skriaudžiavimo taškai, efektyvumo problemos tampa gamyba gulielio taškas
Kampinis pjūvis, suvienijimo procesas prieš suvienijimą. Prieš suvienijant stambias plonas lapo gamyboje, geležies konstrukcijose, anglies mašininiame pramonėje ir kitose srityse reikia išpjauti medžiagos kraštus, kuriuos reikia suvienijoti, ir tada atlikti karštąjį vienvietį arba daugiaputį suvienijimą. Efektyvumo problemos tampa gamybos gulielio tašku. Taigi, lapo konstrukcijų, laivo statybos ir anglies mašinų pramonės atveju buvo išskirta didelė robotizuoto kampinio pjūvio paklausa. Kampiniu pjūviu apdirbami gabalai skaičiuojami tūkstančiais ar net dešimtų tūkstančių, o individualūs rūšys – šimtųmis ar tūkstančiais partijų. Kartu auga poreikis daugiau rūšių, mažesnių serijų, lankstesnės gamybos.
Gamybos pakeitimo efektyvumą reikalinga gerinti struktūrinių elementų, laivų statybos, statybos technikos ir anglies mašinų pramonėse.
Tradiciniai pjovimo metodai turi daug ribojimų
Tradicinis rūblio pjovimas rinkoje paprastai naudojamas jūros mašinų drėkimui, flamed kelių žymėjimui ir pjovimui, penkių ašių specialiosios pjovimo mašinos pjovimui bei robotų rūblio pjovimui.
Palyginti su ankstesniais rūblio pjovimo metodais, industriškas robotų rūblio pjovimas gamybininkams yra pripažįstamas vienu iš tiksliausių pjovimo būdų.
Susiduriant su daugialypiais, mažų serijų darinių, tradicinis mokymasis turi didelius apribojimus, trūksta nelytros apdirbimo tikslumo, pjovimo technologinių parametrų yra sudėtingi ir pan.
Dėl to robotikos įmonės, sistemos integratoriai ir galutiniai vartotojai labai reikalauja paprasto ir lengva naudojamo „ne mokymasis “ sprendimo.
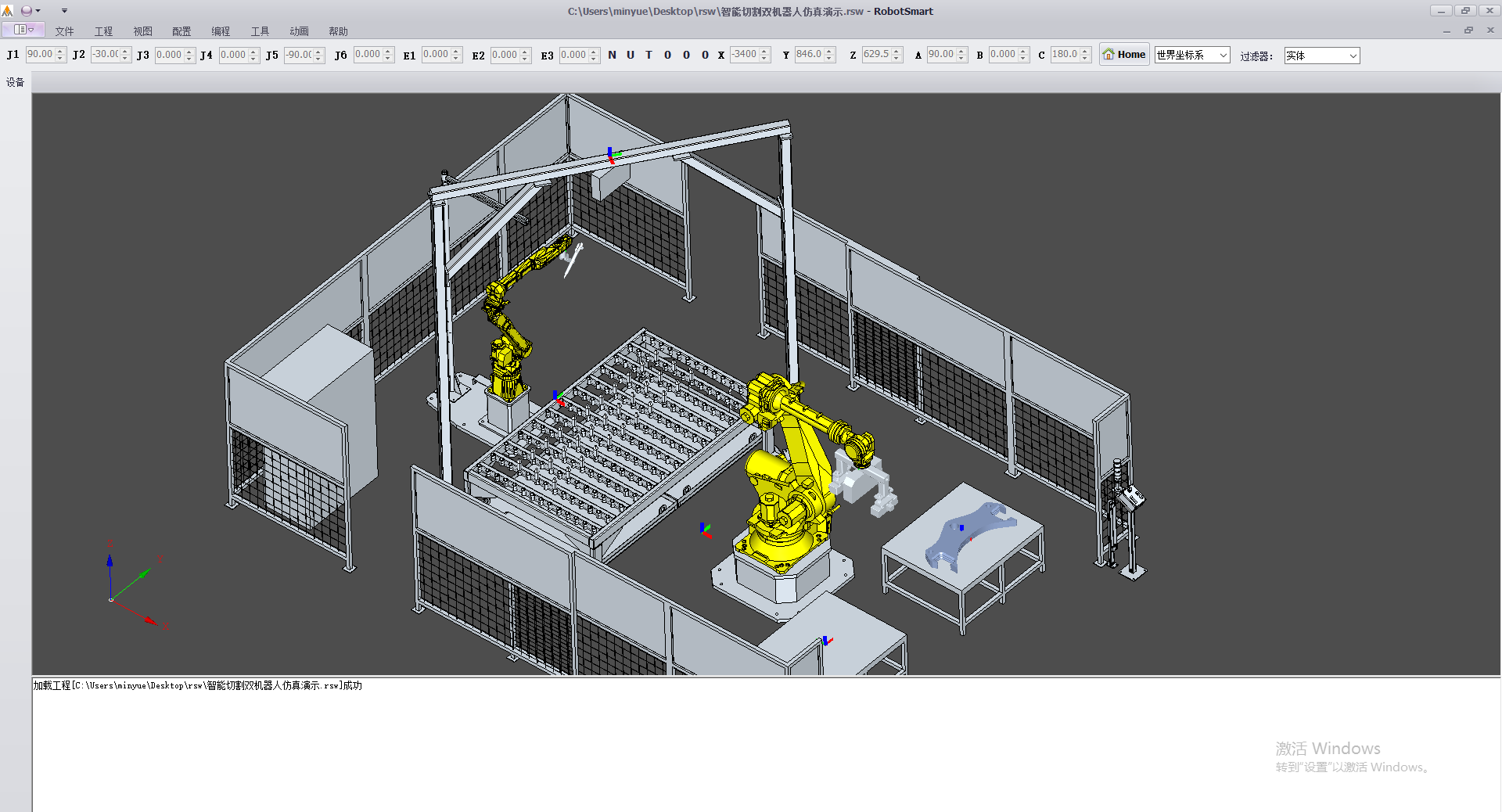
Minyue Intelligent Rūblio Pjovimo Sprendimas susideda iš RobotSmart Inovacinės Sprendimų Sistema , SmartVisions 3D struktūrinės šviesos vizualizacijos sistema ir SmartEye lazerinės matavimo sistemos įgyvendinant nežinomųjų dalykų pamokas be mokymo. Išspręsta gamybos problemų, susijusių su sudėtingu programavimu ir žemesniu intelektualiniu lygiu. Atitinka reikalavimus šilumos gabenimui mažais serijais ir skirtingais darbo elementų tipais. Padidina apdirbimo efektyvumą ir produktyvumą. Galima atlikti daug sudėtingesnius ir įvairesnius užduotis.
tik trys žingsniai: 1. paveikslo importavimas; 2. greita trajektorijų planavimo; 3. automatinis programa generavimas, galite užbaigti savo gabenus kokybiškai ir kiekiui.
Naudojimas MinYue Technology Intelektinė kampų gabenimo stotis, jums reikia tik importuoti CAD DXF failą, pritaikyti gabenimo parametrus, vienu mygtuku priskirti technologinius parametrus, automatizuoti kelio optimizavimą, inteligentiniai kampų trajektorijų planavimas, bei gabenimas viršutinių ir apatinių kampų be priešingos pusės. Dvisaknis kAMERĄ pažinti darbo skyriaus padėtį, paimti ir nustatyti pjovimo stalą. CNC sistemos pradeda dirbti su pjovimo stalu, kai pjovimas baigtas. Adaptuojama įvairiems darbo skyriams tuo pačiu metu, automatinis pjovimo trajektorijos planavimas, pjovimo diapazonas 0,5–4 metrai. Didelė laiko našumas ir saugumas patobulintas.
Palaiko flAMS pjovimo procesą ir plazmos pjovimo procesą.
1 TAIKYMO SRITIS
TH e pjov imo robotinė sistema naudoja dvistacijos veikimo režimą, kuris sudarytas iš M20ID/25 invertuoto roboto, inteligentinio nevirškinamo varomosios sistemos, vieno ašies robotinės YLV25 žemutinės kelio, flAMS pjovimo sistemos ir flAMS pjovimo dARBO STALAS , viso ašių skaičius yra 7.
Tinkamas darbo skyriaus dydžio intervalas: 3200*2500mm ;
Pjovimo procesas: FlAMS
Palaiko įvairias įkrovymo ir iškrovymo režimų formoms, rankiniams įkrovymui ir iškrovimui, balanso lietuvams įkrovimui ir iškrovimui, kelionės lietuvams įkrovimui ir iškrovimui, dviejų robotų bendradarbiavimui įkrovimui ir iškrovimui, CNC įkrovimui ir iškrovimui.
2 gamybos procesas
Rankiniu būdu įdėkite darbo detalę į pjovimo stalą apytiksliai pozicijavimui (įžambė ±5mm detalės pakartojamumo ribose).
Pirmąjį gamybos etapą per programinę įrangą pasirinkite pjovimo vietą, automatiškai bus sugeneruota pjovimo trajektorija ir technologiniai parametrai, sukurtas programos kodas gali būti išsaugotas ed valdymo sistemoje, vėlesnėje gamyboje jis gali būti tiesiog panaudotas (naudojant inteligentinę sprendimų priėmimo sistemą RobotSmart, galima ji išvesti per 15-20 minučių).
Pjovimo robotas tiksliai pozicijuojasi naudojantis laseriu vizija jutiklis
(privalumai palyginti su kontakiniu kraštų aptikimu interviu efektyvumo ir tikslumo požiūriu).
Robotas pradėti pjovia detalę.
Robotas perkelia į kitą dARBO STALAS pjovimo operacijai.