EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


3D Vision Kaitinamasis Plazminis Robotinės Širties Apsilietimas
Darbo diapazonas:
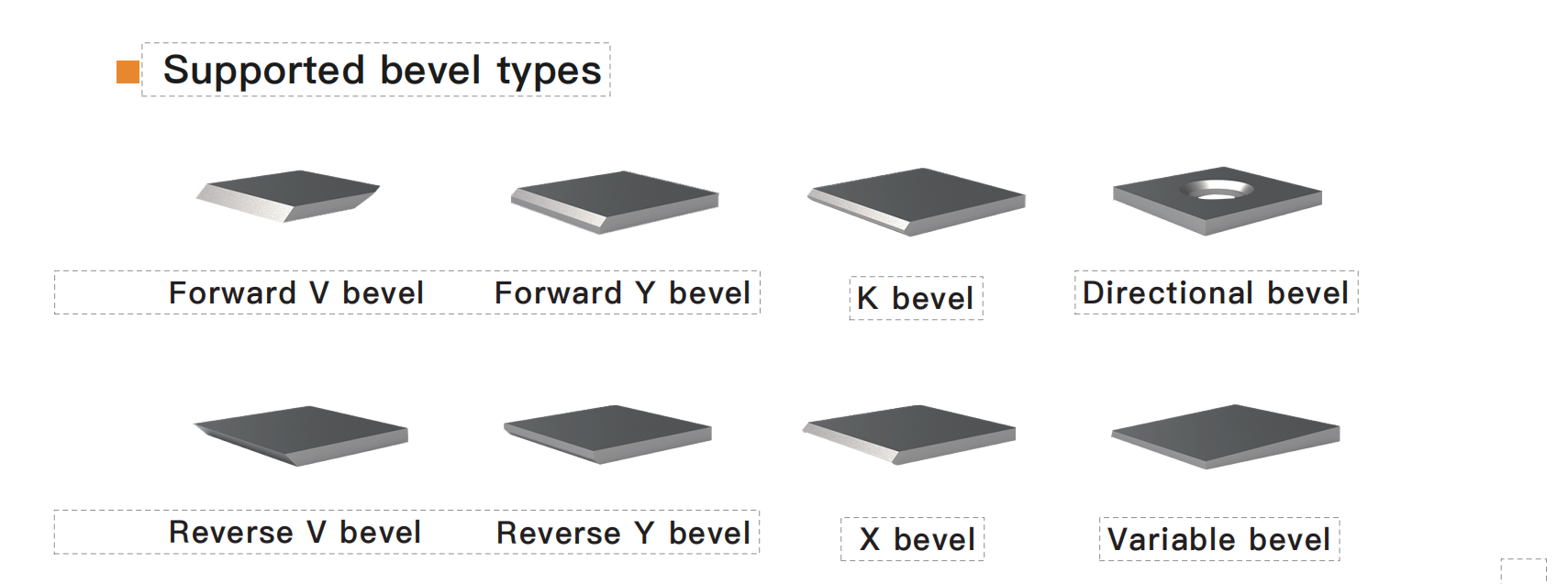
Teigiama ausis: 100x100-7000x1200mm@20-45°
Atvirkštinis kampinis pjūvis: 100x100-6800x1000mm@40-60°
NEPALEIDŽIAMAS INTELIGENTUSIS Kampinis pjūvis
Kampinio pjovimo ir suvienijimo procese prieš tai, kokybės ir efektyvumo problemos gali tiesiogiai sukelti gamybos slaptoves. Tai ypač aktuali mažų dalių kampiniame pjūvyje. Dabar mažose detalėse naudojamas tradicinis flamedinis pjūvis, kuriam reikia iš anksto nupiešti, padėti ir atlikti kampinį pjūvį su flamediniu judejimu, o reikalaujama mažos darbo vietos. Kiekvieną kartą, kai keičiamas darbo objektas, reikia atnaujinti individualią priekinę šiluminę apdirbimą. Taigi, tradicinis flamedinis pjūvio procesas turi trūkumų, tokių kaip nepakankamas kampinio pjūvio sutapatumas, bloga kokybė, žemas efektyvumas, daugiau užima darbuotojų ir mažas taikymo plotis.
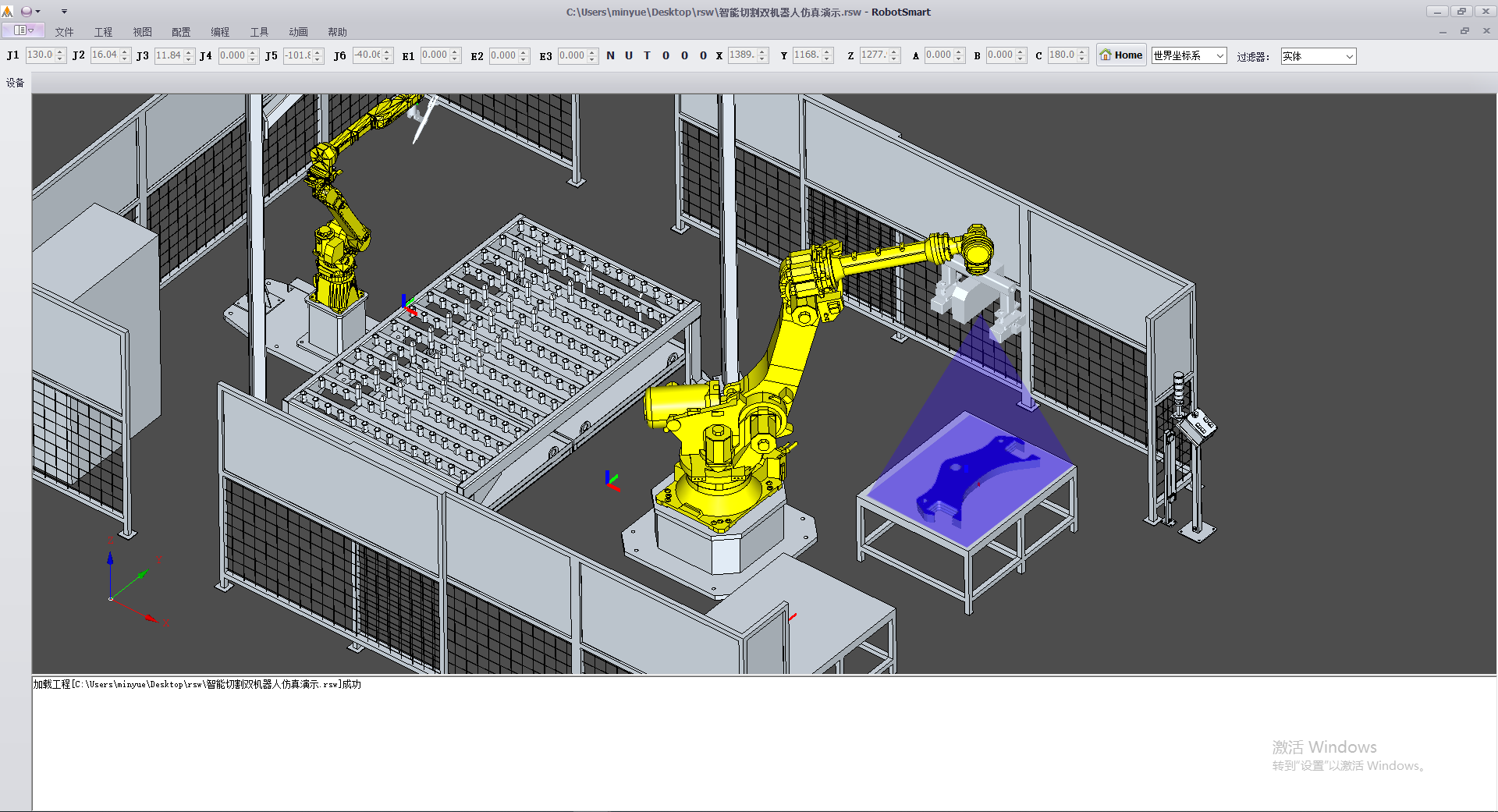
MINYUE TECHNOLOGY nežinmenčiųjų smailių pjūčių technologija naudoja RobotSmart jaudringąjį sprendimų priėmimo sistemą su SmartVisions 3D vaizdo sistema ir SmartEye laseriniu stebėjimo sistema, kurios įgyvendina „be programavimo + vaizdas“ jaudringąjį smailių pjūčių procesą. Išspręsta gamybos problemų dėl sudėtingo programavimo ir žemos intelektualumo lygmenų, tuo pačiu atitinkant reikalavimus pjauti mažas partijas skirtingų darbo elementų tipų, padidinant apdirbimo efektyvumą ir produktyvumą.

Atsakydami į dar sudėtingesnius ir įvairesnius užduotis, yra tik trys žingsniai.
1. CAD DXF failų importavimas; 2. Greitas trajektorijos planavimas; 3. Automatinis pjūčių programų generavimas, tada pjūčių užduotis gali būti atlikta greitai.
Automatinis pjūčių kelio optimizavimas, jaudringas smailiųjų kelių planavimas, be atvirkštinio pjovo viršutiniams ir apatiniams smailiams.
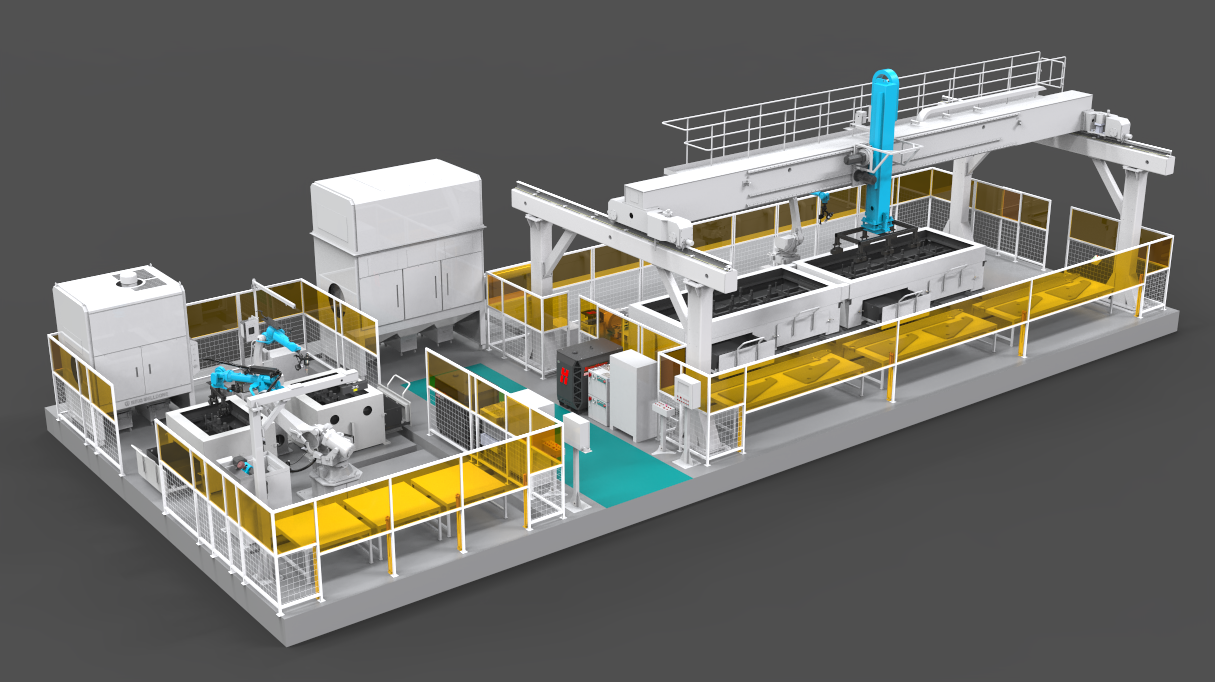
Dvitarpės kamerų fotoaparatas nuožymi paveikslus, kad nustatytų darbo apimties padėtį ir užfiksuotų ir įkeltų pjovimo stalą. Kai pjovimas baigiamas, CNC einama dirbti su pjovimo stalu, kad iškeltų. Keli darbai pritaikomi tuo pačiu metu, o pjovimo trajektorija planuojama automatiškai. Pjovimo diapazonas yra nuo 0,5 iki 4 metrų. Didelė laiko naudojimo efektyvumo ir saugumo patobulinimas. Palaiko degimo pjovimo procesą ir plazmos pjovimo procesą.
Palaiko daugelio įkrovymo ir iškrovymo režimų: rankinį įkrovymą ir iškrovimą, kraninio krauto įkrovymą ir iškrovimą, kelionės kraninio įkrovymą ir iškrovimą, dviejų robotų bendradarbiavimą įkrovant ir iškrovant, CNC įkrovymą ir iškrovimą.
Gamybos procesas
● Darbo apimtis ant pjovimo stalo ruošiama rankomis (darbo apimties pakartojamumas yra ±5mm).
● Pirmasis gamybos procesas per programinę įrangą, kuria automatiškai generuojama pjovimo trajektorija ir technologiniai parametrai, programa gali būti saugoma valdymo sistemoje, vėlesnėje gamyboje ji gali būti tiesiog iškviepta. (RobotSmart per inteligentinį sprendimų platformos sistemą gali būti įdiegta per 15-20 minučių.)
● Pjovimo robotas naudoja laserinį vaizdo jutiklį tiksliai nustatyti darbo aparačio padėtį. (Priežastis: Aukštesnis efektyvumas ir tikslumas nei susijusiuose su stygių aptikimu kraštiniuose jutikliuose.)
● Palaiko stalo ratais, gantruočių, kantilevero robotų darbo stotis.
● Pasiūlyta 12 sprendimų segmentuotoms programavimo scenarijams.
Palaikomos plokščios tipai