Mes visi žinome, kad dirbti su robotais gali būti sudėtinga, tačiau turint tinkamą informaciją ir praktiką, tai gali būti labai paprasta. MINYUE yra čia, kad išsilavinętumėte apie robotų valdymą ir padarytumėte tai geriausiu būdu. Šis vadovas aptars, kaip operuoti apdorojimo sistema , kaip valdyti jų judėjimus ir kaip tai daryti saugiai ir efektyviai.
Pirma, viskas apie skirtingus robotų tipus. Yra du pagrindiniai robotų tipai, kuriuos turite žinoti: fiksuoti robotai ir judantys robotai. Kai kalbame apie fiksuotus robotus, tai tie, kurie visai nejudą. Jie dažnai naudojami gamyklose, kad atliktų užduotis, pvz., sudėtų komponentus. Priešingai, judantys robotai yra sukurti naviguoti aplinkojose ir perkelti save. Šie robotai yra judanti jų forma, jiems paprastai naudojama pakučių pristatymui ar valymui. Svarbu suprasti skirtumus tarp šių tipų, nes tai leidžia jums padaryti teisingą pasirinkimą ir pasirinkti tinkamą robotą tam darbui, kurį turite atlikti.
Dabar kalbame apie MINYUE roboto valdymą. Pagrindinė sąsaja, naudojama judant robotu, gali būti džepas ar mygtukų rinkinys, kurį galima naudoti norint valdyti judėjimą keturiomis kryptimis. Valdymo praktika yra labai svarbi, kad prisitiktumėte su tuo, kaip robotas juda ir reaguoja. Robotą galima programuoti parašydami instrukcijų dalis, vadinamas kodu. Šis kodas duoda robotui instrukcijas, kaip jį judinti ir kokius užduotis atlikti. Norint išmokti valdyti robotus, reikia išmokti programuoti, kas dabar yra pagrindinė gebėjimo šaka.
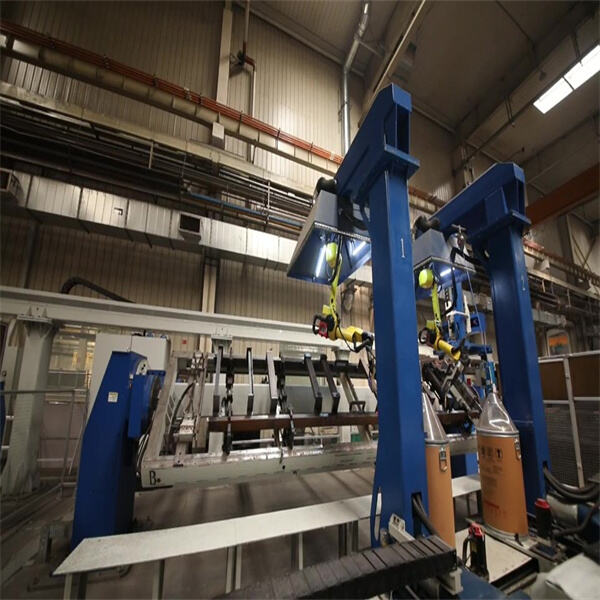
Taip pat yra poreikis robotams judėti sudėtingais būdais, ir tai gali būti sudėtingiau. Kai kurie iš jų yra labai sudėtingi, todėl bandome juos padalinti į valdomas dalis. Pavyzdžiui, tarkime, norite pervedinėti robota iš vienos kambario pusės į kitą. Galite pradėti nuo jo orientavimo, kad jis buvo nukreiptas teisinga kryptimi. Tada jį trauktumėte šiek tiek į priekį ir vėliau sukeltumėte, kad jis pasirengtų eiti ten, kur jums reikia. Tai daro MINYUE automatiniai medžiagų transliavimo robotai lengviau valdyti robota. Taip pat galite naudoti jutiklius, kurie leidžia robotui suprasti aplinką. Jutikliai padeda robotui išvengti kliūčių ir geresnėmis navigacijos būdais, kas padaro jūsų darbą kaip operatoriaus lengvesnį.

Bet koks laikas, praleistas vengiant geresnio robotų valdymo, yra išmetamas laikas. Ir čiaužtis daugiau treniruojasi, tuo labiau prisivedi prie roboto, tuo didesnę pasitikėjimu turėsite jį valdant. Galite taip pat tobulinti savo įgūdžius, derinant robotą programavimą. Jis gali padaryti mažas pataisas į kodą, kurį parašėte, kad robotas geriau judėtų ir veikia efektyviau. Reguliariu praktika ir reikalingais pokyčiais, jūsų robotų valdymo įgūdžiai robotinė varžymo ranka gerės drastiškai.

Dirbdami su robotais, sauga yra vienas iš pagrindinių prioritetų. Visada laikykitės saugos taisyklių ir procedūrų, kad jūs ir kiti būtų saugūs. Dirbdami su robotais, gerai būtų būti dėmesingiems aplinkos atžvilgiu, nes kartais jie gali judėti be išankstinio įspėjimo. Norint optimizuoti operacijas, užtikrinkite, kad tinkamas robotas vykdytų reikalaujamą darbą. Pavyzdžiui, jei reikia perkelti sunkius objektus, turėtumėte naudoti robotą, skirtą pakelti ir vežti sunkesnius krūvesčius. Be to, jutikliai ir automatizavimas leidžia pasiekti daugiau mažesnuo laiko ir energijos. Automatizavimas gali atlikti dalį darbo už jus, kad užtaisytumėte laiko ir padarytumėte savo darbą lengvesnį.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









