Robotai, kurie yra šikiniai, vis labiau taps realybe. Galite manyti, kad jie gali būti fabrikose, ligoninėse, ir net vietoj, kur gyvename mes su jumis. Šie automatinis suvienydymo robotas yra sukurti siekiant argumentuoti, mokytis ir veikti panašiai kaip žmonės, kad galėtų atlikti įvairius užduotis. Pavyzdžiui, jie galėtų mums padėti namų darbuose, pagrebtų gydytojus ar net galėtų padėti kurti produktus. Jie naudoja tam tikras sudėtingas technologijas, tokias kaip jutikliai ir kameros, kad galėtų judėti ir veikti nepriklausomai. Su šia technologija jie gali suprasti aplinką beveik tuo pačiu būdu, kaip mes, kai apžiūrime aplinką ir sprendžiame, ką daryti toliau.
Mąstingos technologijos labai pakeitė tai, kaip gyvename, dirbame ir praleidžiame laisvalaikį, ypač robotikos kontekste. Jos pakeitė būdus, kuriuomis dirbame, mokomės, taip pat, tiesiog žaidžiame. Tai... pramoninis suvienodinimo robotas gali atlikti darbus, kurius mes tik įsivaizdavome, kad jie galimi tik žmonėms, tai fascinuojančia. Jie naudojami fabrikose montuoti daiktus, kas pašvietina ir padaro procesą efektyvesniu. Ligoniųje jie padeda operacijose, užtikrinant, kad visi instrumentai būtų ten, kur jie turėtų būti, ir kad operacinis plotas būtų paruoštas, tarp kitų užduočių.
Robotai su smegenimis pakeitė daug darbo vietų įvairiose sektoriuose. Tačiau šie prietaisai taip pat padeda procesams eiti greičiau, ypač fabrikose, kurie padeda sumažinti klaidas, kurios dažnai kyla, kai dirba žmonės. Jie gali atlikti kartotinius užduotis greitai ir tiksliai, kas padeda išlaikyti gamybos grafiką. Medicinos srityje jie padeda gydytojams nustatyti ligas ir juos gydymui. Jie gali padėti tokiais dalykais kaip pastabų rašymas ar informacijos teikimas apie paciento sveikatą, leidžiant gydytojams trunkti daugiau laiko su pacientais. Robotai taip pat naudojami kai kuriuose ūkiuose plantuoti ir rinkti augalus, taip užtaikydami ūkininkams laiko ir darbo. Šie MINYUE robotinę laserinę suvienodinimo mašiną keičia būdus, kuriuomis veikiame, ir padeda mums pasiekti rezultatus efektyviau.

Perspektyvos žmonių ir robotų bendradarbiavimui iš tiesų yra įspūdingos. Daugiau MINYUE robotų bus padedamų žmonėms kitose darbo srityse ir jomis, kai technologijos toliau vystysis. Šis bendradarbiavimas leis mums daryti daugiau ir kurti tai, ko vieninteliu nebegalėjome sukurti. Geresnprodukcija yra galima, jei žmonės ir robotai papildo vieni kiti. Pavyzdžiui, robotas gali atlikti sunkias fizinio pobūdžio užduotis, o žmogus gali koncentruotis priimant svarbias sprendimus.
Gyvūs robotai turi daug teigiamų pusių, tačiau kartu turime aptarti ir svarbias klausimus bei nerimo priežastis. Pavyzdžiui, MINYUE robotai, kurie gali rinkti informaciją apie mus ir ją naudoti, kelia naujas privatumo ir saugumo problemas. Jie gali susirūpinti dėl to, kaip valdomi jų asmeninės duomenys. Be to, yra grėsmė, kad robotai pašalins darbus nuo žmonių, ir su tuo turime susitvarkyti.
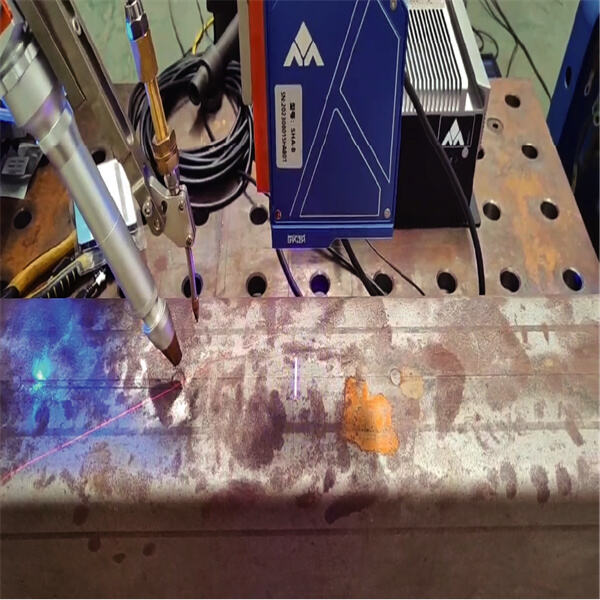
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
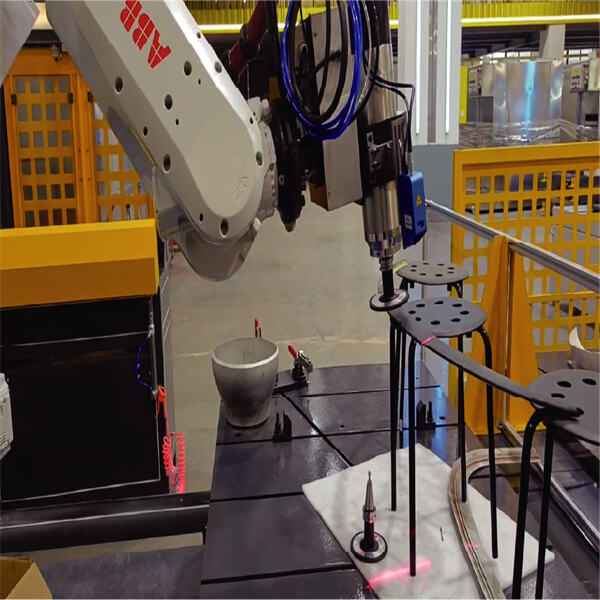
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


