EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Programma omnino non docens intelligentiae suturae, acutissimum instrumentum industriae, ad superandos problemata multistratum multiplex suturae paranchismatis hydraulici.
“Beijing Minyue Technology Co.,Ltd ”Quam Sinae princeps enterprise technologicum pro non- Docere intelligentia robotarum industrialium . Intuemur fabricam flexibilem cum systemate ipso invento RobotSmart-intelligent decision-making, SmartVision- visio systemate binoculari structurae luminis, SmartEye -systema subsequentis fissurae laser, Praebemus generationem novam solutionum intelligentium robotarum non-docentium ad conflatandum et secandum.
Nostrum apud societatem est team R&D interdisciplinariter magistrorum et doctorum et peritorum technicorum ex campis graphicis et automationis. Plus quam 90% eorum habent gradum magistri vel superiorem.
Specializantes in controllo robotico, algorismis et interactione humani-robotici, nos sumus devoti ad afferendum meliores solutiones roboticas intelligentis industriae manufactoriae globali.
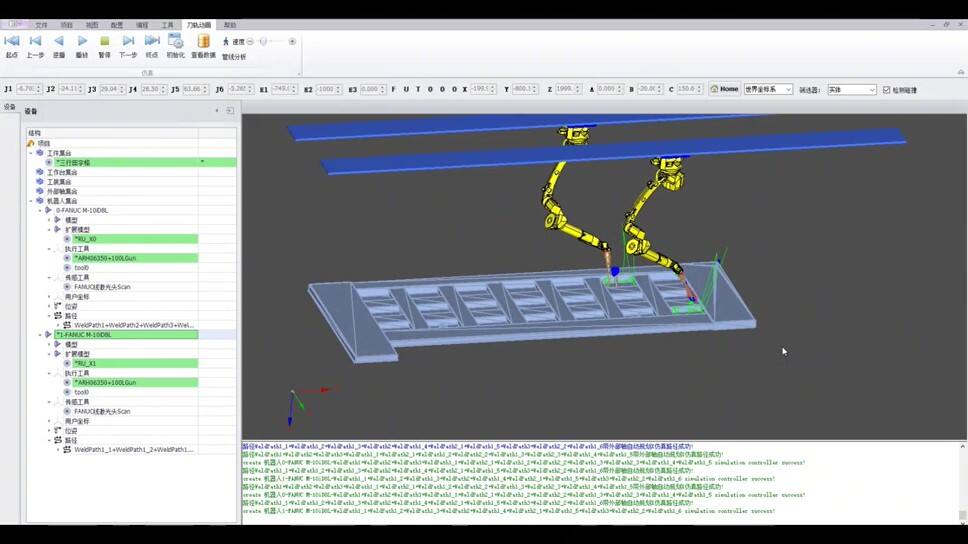
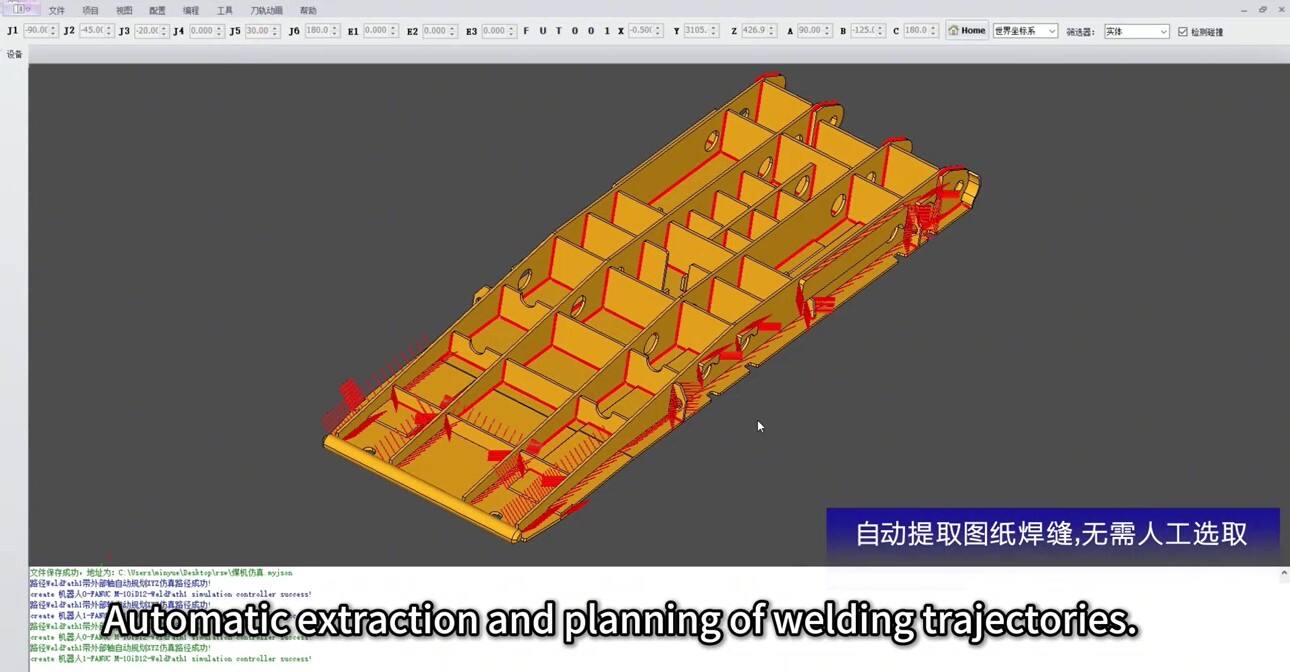
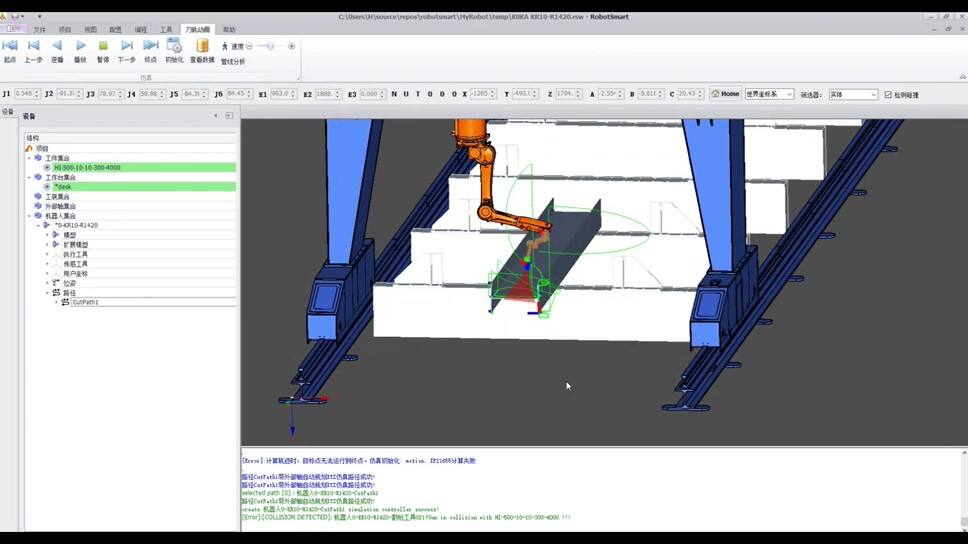
Postquam usor importavit modelum operis 3D in systema decisionis intelligentis RobotSmart, software cito et automate generare potest codicem motus robotis industrialibus, simul etiam simulationem motus robotis, detegendos collisiones, planificationem itineris declinandi obstacula, declinationem singularitatis et detectionem limitis axis aliaque functiones, ut traditionalis processus programmationis manualis complicatus et inefficax evitetur.
Movendo in novam directionem, solvendo nodos industriae.
Industria carbonifera hydraulica subsidia problemae coniunctionis, quae adfectant industriam innovandam
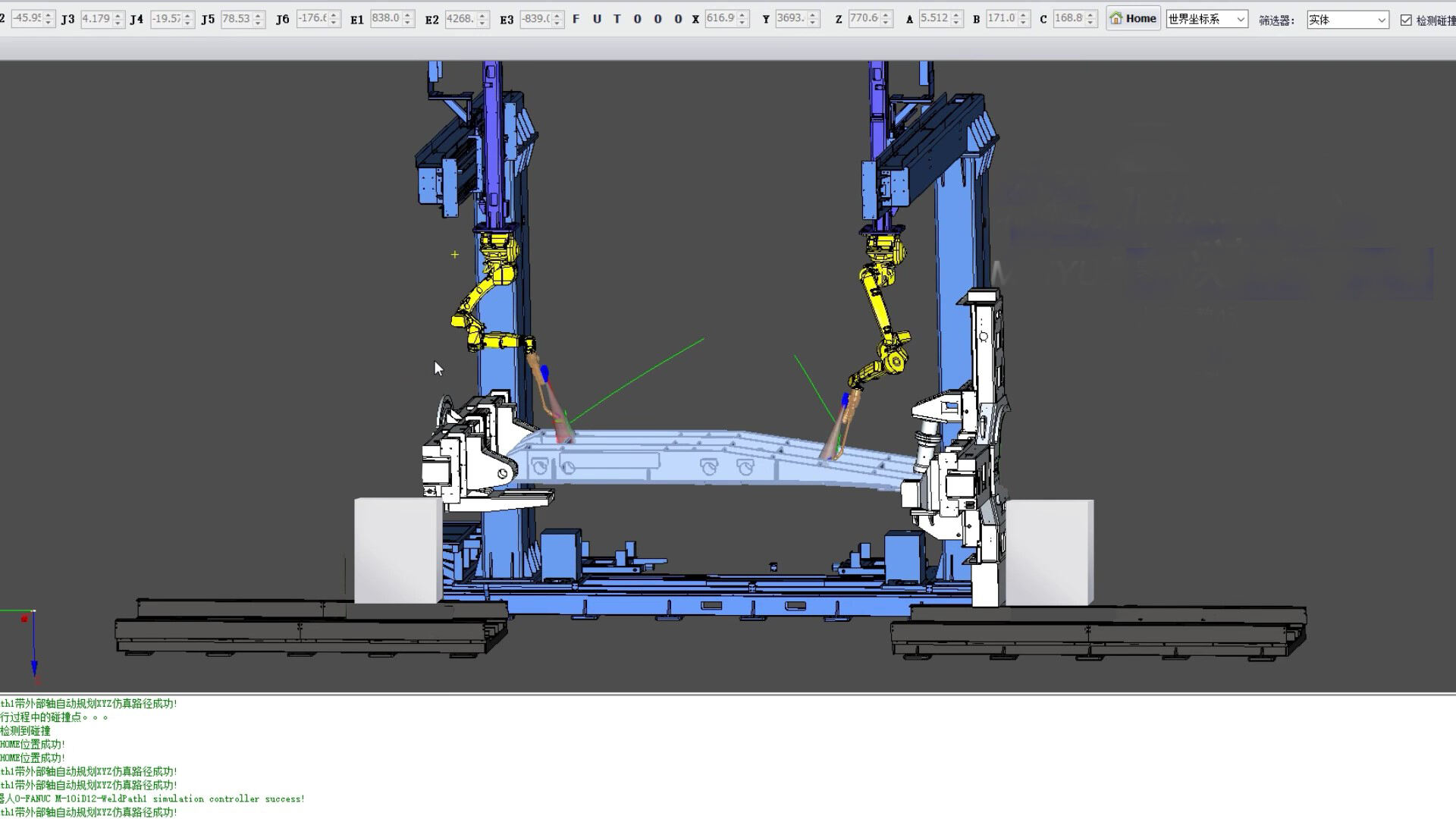
Pondus partium structuralium principalium supportis hydraulicorum saepius utilizerum in industria carbonifera possit esse amplius viginti tonnas. Plures ex his sunt partes structurales formae thesaurariae coniunctae ex laminis mediocriter crassis. Haec est pars principalis supportis hydraulicis onera graviora et impetus sustinenda. Supportus hydraulici praedominantur per breves, coniunctiones tridimensionales transversas.
Plus mille coniunctiones .et maior pars eorum est soldatura multistratifica multipassiva laminarum mediocrium crassitudinis. Suturae sunt compactae, cum difficultate accessus ad soldaturam, et qualitas earum directe influet in productionem tutam faciei operis.
Speciale natura structurae suae et complexitas processus, manualis soldatura non potest stabilire constantiam soldaturae et uniformitatem qualitatis.
Uti solita robotica soldatura.
- Docere programmationem, r requirit intermissionem operis et usum robotis minorem.
- Structura est complexa, cum armaturis intra se et diversi magnitudinis, et plus mille suturas habentibus, Necessitas sumit 5 dies ut docere programmentur manu.
- Praecisio positionis et conglutinationis operis non potest satisfacere requisitis, et problemata thermicae deformationis localis soldaturae causant deviationem suturae.
- Est difficillimum totam hydraulicae roboticae automationis coniunctionem perficere. subsidia Structurae partes.
A praecipua societas in industria carbonifera, adoptans Minyue Technology's unum-button start, non-doctrina intelligentis solutionis coniunctionis.
Passus 1: Noster clientulus importat 3D opus modellem in RobotSmart - Intelligent Decision System.
Passus 2: RobotSmart-Systema decisionum intelligentium, quod celeriter et automate itineris robotis industrialem generare potest, simul roboti motus simulationem, collisionis detegendae, singularitatis vitandae et axis limitis detectionis facere potest.
Gradus 3: SmartVision-3D binoculis structurata lux visio system opus positionem grossam facit. 3D binoculis structurata lux visio system superficiem operis scannet et inversa modeling ab puncto nube datum facit. Restituunt opus superficiem features cum modeling accurate intra ± 5mm. Exploratio accurate intra 40 mm pro coagmentatione et initia positione operis ,Delectat coagmentationem angulum intra 10 °. Delectat variationes in coniunctione longitudine intra 30 mm (adjustabilis) 。
Gradus 4: SmartEye - Systema praesidii visionis laser. Scansio sulci soderantis, confirmatio positionis et informationis sulci soderantis, correctio modeli digitalis 3D et positionis actualis operis sulci soderantis, et acquisitio datae positionis actualis sulci soderantis. Supportat plures robotas, plures axes externos, et positio labor cooperative.
SmartVision-3D systema visionis binoculare structurata lumine importans drawing modelorum 3D ,Data nubis puncti 3D accepta comparatur cum modelo digitali 3D ,Robot solum soderat suturas cum data nube puncti 3D. Quando data nubis puncti accepta a sensore congruit cum modello 3D post refashioning componentium operis, componentia refashioned soderantur.
Vere realisat productionem uno-pulsu start, 2 minutes ad realisationem arcus incipiendi, velox, accuratus, omnino non-programmatus, alta efficiencia et alta praecisio.
Technologia ducens, industria attentiva.