Robotēs industriālēs sunt māchinae speciālēs quae adiuvant automatisāre multa opera importantia in fabricīs. Exempla horum operum sunt sīnctura (coniungenda fragmenta metallī), pingere rēs, compingere cistulae, et multa alia. Hae robotēs prosunt quod possunt opus facere velociter et cum praecīsiōne. Sensōrēs sunt partēs earum robotum quae sunt criticae. Sensōrēs sunt apparatūra speciālēs quae permittunt robotibus vidēre, audīre, tangere, et movēre sīcut hominēs.
Sensōrēs sunt instrumenta cognita quae possunt observāre mutationēs in suō circumstantia. Si aliquid est prope ea si est nimis calidum, nimis frīgidum. Cum MINYUE sensor fascei laser dētectant aliquid, mittunt nūntiōs ad systema contrōlis robotis. Hoc systema est quasi cerebrum robotis, permitte illud decernere quod opus fīeri debet ex datīs quos accipit ab sensōribus. Haec perceptiō praebeat robotibus tantam efficaciam et vim ut possint perficere opera complexa in fabricīs.
Quod exempli causa, si robot parietem pingere debet, sensus ei indicare possunt ubi spargere pigmentum et quantum spargere. Hoc significat ut robot opus citius faciat sine erroribus. Hi sensus MINYUE adiuvant ut robots non solum celeriores sed etiam sapientiores et tutores fiant. Haec efficientia societatibus permitit plura conficere in minori tempore, et item pecunias servare quoniam minus materiam perdunt et minus errant.
Hic, nos inspectamus sex ex eis qui hodie operationem robotarum industrialium transfigurant. Telephonus plures habet longe distantia sensor , alterum eorum being sensor proximitatis. Hoc sensor est utile quia sentit objectum sine contactu. Haec ars est crucial pro robotis ad praeventionem accidentium, sicut impingendo in aliam machinam vel operarium. Sensor proximitatis usi in robotis industrialibus eos faciunt ut distantiam tutam ab hominibus servent, permitte eis simul secure laborare absque periculo injury.
Est etiam alter genus important sensor usus in robotics sensor vi. Sensor vi Mensurat quantum vis applicatur ad objectum. Cum robot coniungit duo componentes, exempli gratia, sensor vi dicit robot quantum vim debet applicare, sive ut pull vel push. Haec res est crucial pro officiis quae accurate et control require, sicut parvulos componentes coniungentes vel productum ad altum qualitatis finitionem. Proinde, robot cum talibus princeps celeritate laser sensorem possunt executare synchrony munera quae require curatam subcisionem, quod requirit robotics, et fiunt pars integral assembly line.

Praeterea, MINYUE sensus certissimam praecisionem praebent dum robota operas perficiunt. Hoc pauciores errores facit, etiam sine ulla culpa productionem, quod magnopere in processu qualitatis controlis valet. Recte sensus utentes, societates suavem, efficientiorem, et fideliorem productionem conficiant. Haec fidelitas magna est ad fiduciam in eis operariis conciliandam, et producta fabricata normas expectatas implent.
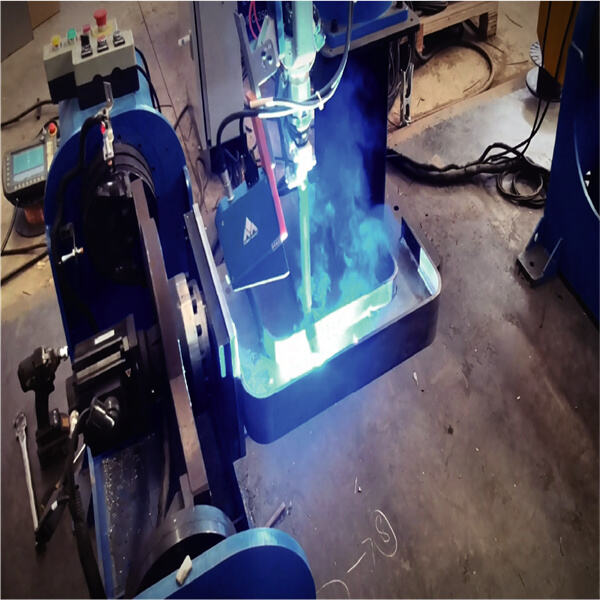
Etiam robotae instructae sensibus ad laborem usque ad summam fatigationem desinentes — litteraliter. Hae robotae super varia sensuum instrumenta confidunt ut opera complexa accurate et celeriter exerceant. Exempli gratia, considera robotam ambulare, movere per fabbricam: cum sursum fertur, industrial laser sensor indicat quo proxime eundum sit. Faciendo hoc, robota ex certo loco disceat, sive iubetur circumambulare cameram, evitans res, sive instruitur ad aliquem in opere iuvandum.
Velox, accuratus, prorsus Sine-Programmatione, alta efficentia et alta praecisio. Solvit complicatum processum doctrinae robotorum traditionalium et parcat temponi immobilitatis doctrinae.
Beijing Minyue Technology Co.,LTD, ut leading enterprise technologicum in applicatione non-manualis roboticae industrialis. Specializamur in fabrica intelligentia flexibili cum systemate nostro proprio RobotSmart - Systema Decisionum Intelligentium, SmartVision - Systema Visionis Binochali Structurae Luminis, et SmartEye - Systema Visionis Laser Trajectus Seguendi. Offertur nova generatio solutionum roboticarum intelligentium pro fusione et sectura.
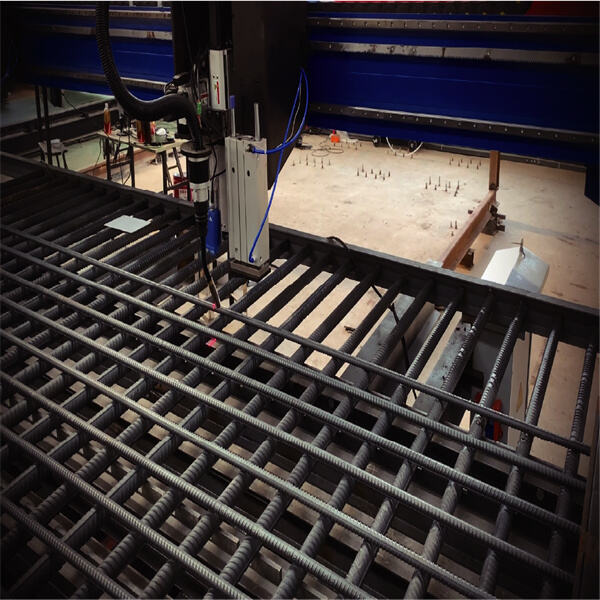
Praebet potentem praecipuum robotorum pro fusione, onusta frontali, laterali, inverso, montatura gantrii, planificatio itineris intelligentis pro multis robotis, multibus axibus externis, et positionario cooperando opere. Realizat simulationem motus robotici, detegit collisiones, vitat singularitates et deprehendit limites axium.
Adoptando functionem inveniendi et sequendi, scannandi fissuram fusionis, confirmandi positionem et informationem fissurae fusiva, corrigendi positionem fissurae fusionis inter disegnum digitalis 3D et opus reale, et solvendi problemata fissurae praeiudicantis propter errorem materialium introeuntium et deformationem thermicam.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








