 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



LDWP-305 Sensor secundandi laser
Cum correctione positionis et deviationis 01, 02 Insequendo in tempore reali, 03 Scannando et cum functione automatis sui coniunctionis.
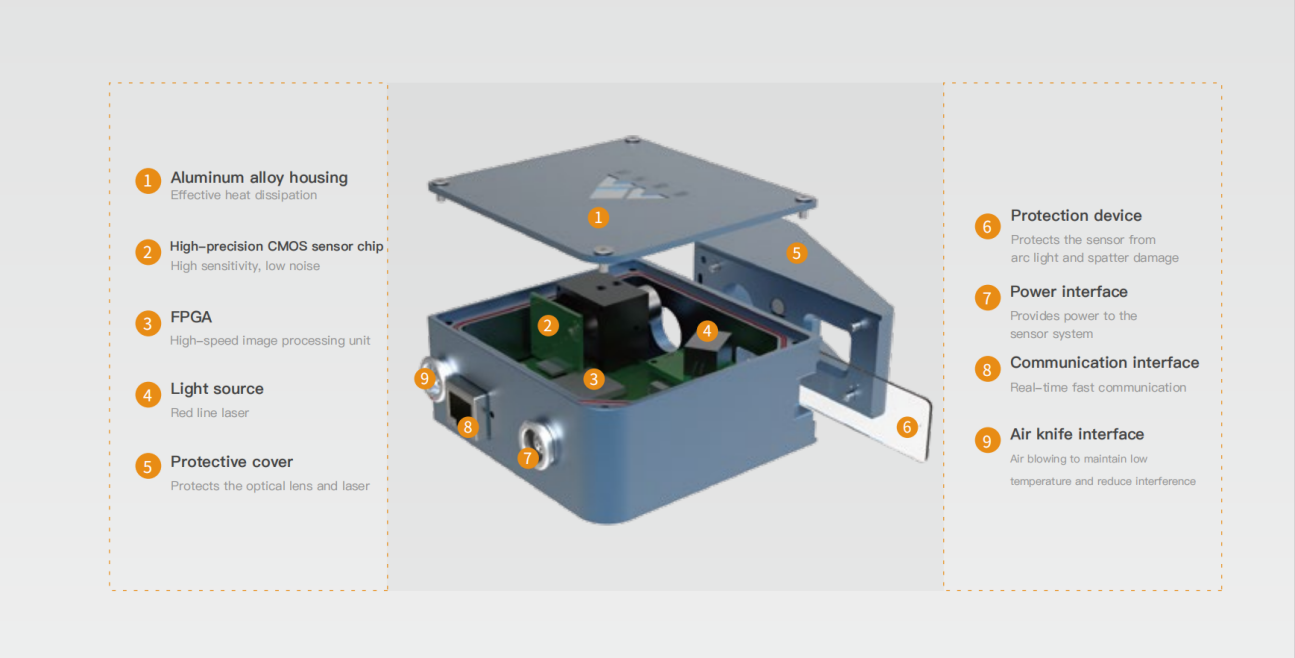
- Conspectus
- Spport robot brand
Sensorem linearem structuram lucis mensurationem adoptat, qui habet velocem lineam imaginis, sine contactu et sine motu mechanicus; Fortis adaptabilitas, capax parametrorum suturae fusionis output; Tota insertio, cum externis computeribus industrialibus et multis aliis praestantia, late utitur in diversis generibus automatis fusionibus. Sive processus fusione, possimus supportum fidum et stabilem operationem praebere, ut optima resultata in variis scenariis fusionis securus sint.
Sensor idoneus est ad applicationes maxime exigentes, quoniam non est sensibilis ad lucem vagantem, aquam et pulvere (IP67) et immunis est ad radiationem electromagneticae (EMC).
Cum Potenti Function
01. positio et deviatio emendatio
Functio positionis et correctionis deviationis utilizzatur pro scenariis fusi flexibilibus differentium operarum eodem modello sed cum tolerantia incoherentibus. Haec functio certificatur ut nulla interventio manualis requiratur commutando opera, et robot a systemate positionis et correctionis deviationis ducitur ad praecisam fusionem consequendam,
Positionem Duobus Punctis aptam pro fusionibus offset bidimensionalibus linearibus.
Positionem Multiplici aptam pro fusionibus offset bidimensionalibus multisegmentalibus
Positionem Segmentalem aptam pro fusionibus offset tridimensionalibus multisegmentalibus.
02 Insecutio Realis Temporis
Functio insecutio realis temporis utilizzatur in scenariis fusionis quaerentibus altam efficientiam et nullam interference spatialis. Sensor fixatur relativus ad facem fusionis, et facies fusoria ipso mutat iter fusionis secundum datas coordinatarum 3D.
03. Scanning et Sutura Automatice Coniunctiva,
Functio scanningu et automaticae soderationis permitit sensori primum colligere informationes geometricas de soderibus. Haec functio est apta ad alta, reflectiva, angusta spatia soderationis et complexas situationes soderationis.
Laser Sequendi Sodalis
Laser Sequendi Sodalis potest discernere altas, basas et sinistras et dextrorsum deviationes soderum.
Potest discernere soderes coniunctionis cum parvis fissuris.
Resolvit problemata sequendi soderum coniunctionis lamminarum tenuium.
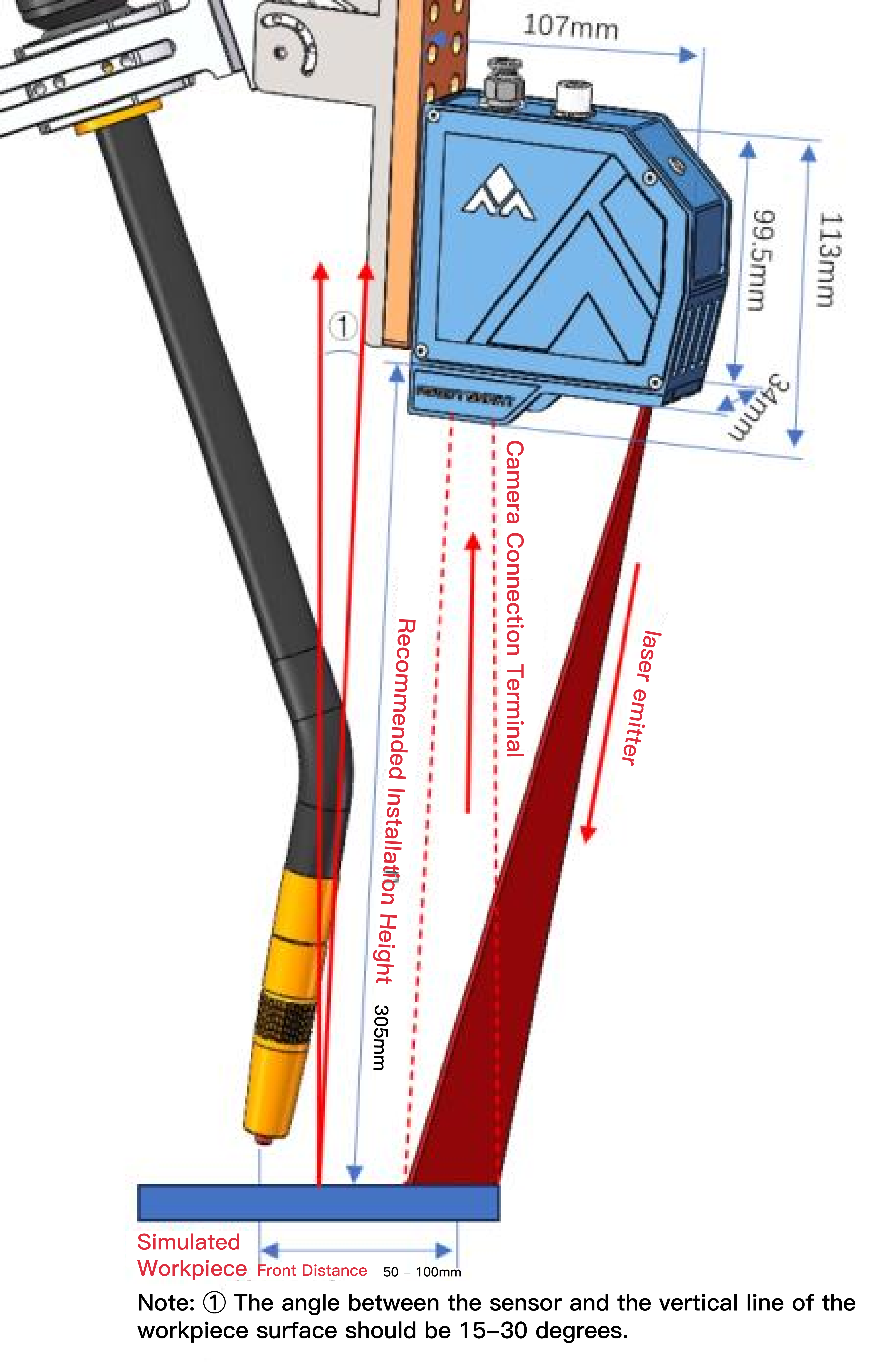
Optima distantia observationis est fere 150mm.
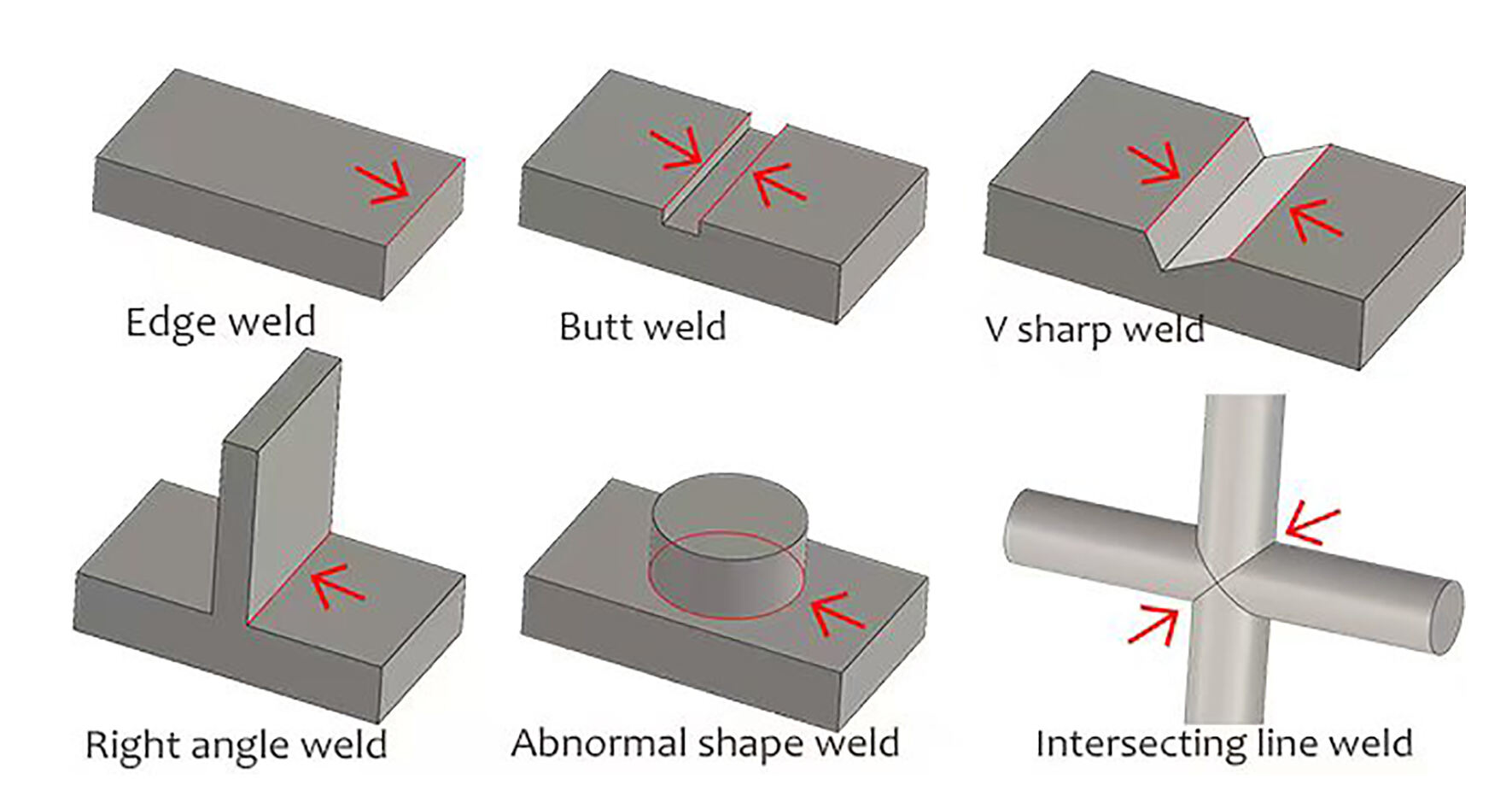
Supportat genus soderis
Soderatio in sulcum V
Soderatio obliqua
Soderatio hemming
Coniunctio per soldatura
Soldaturae superpositae, etc.
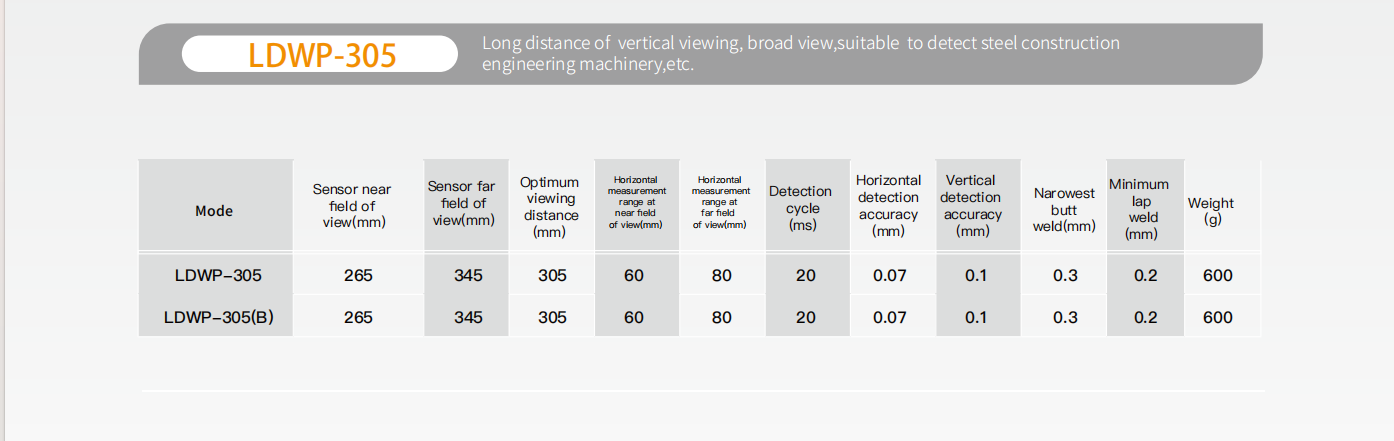
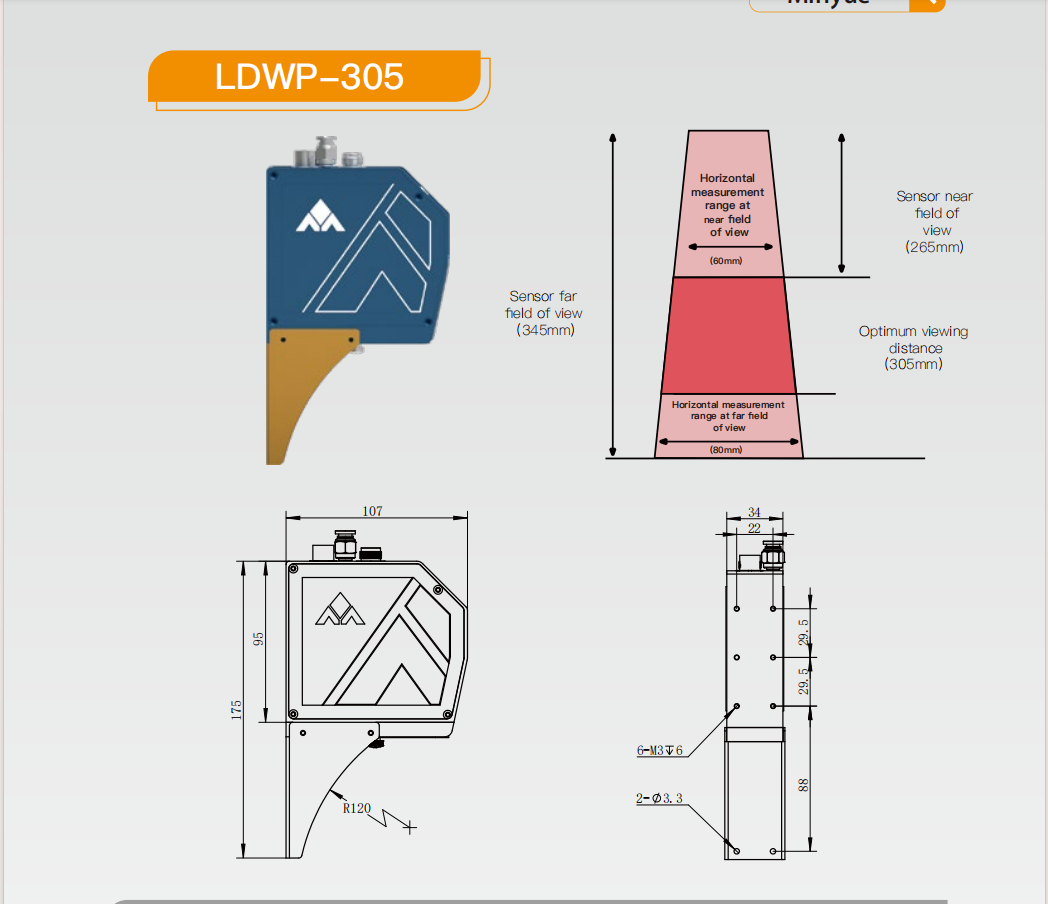
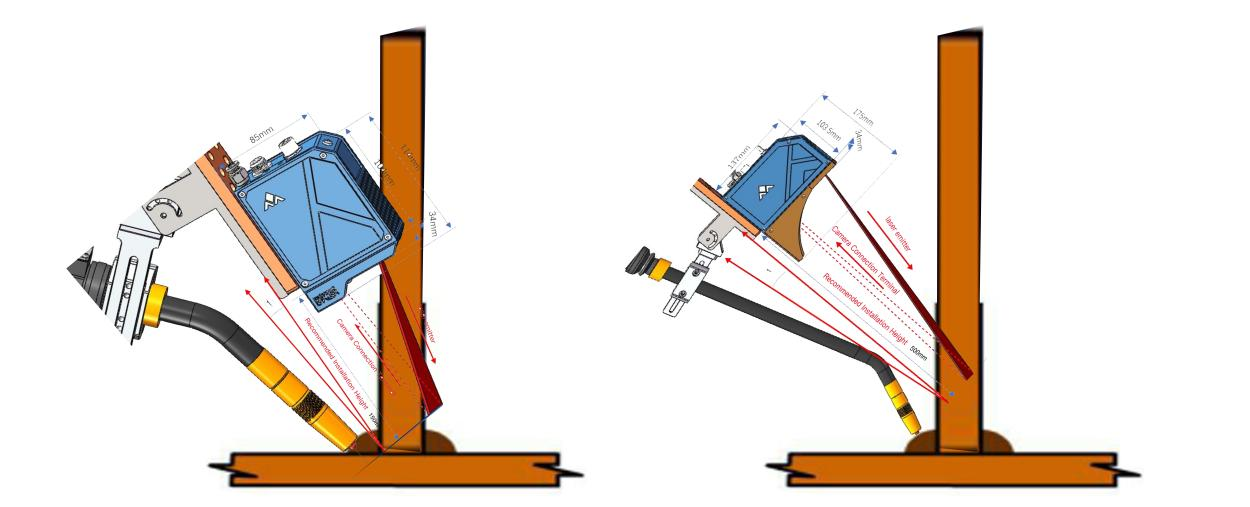
Longa distantia prospectus verticalis, lata visio, apta pro Structura Ferrea et Industria Machinamentorum Constructionis.
Selige type ratione secundum realem ambitum applicationis, ut evitas collisionem operae sensorium, onus robotis communiter normaliter opus est 20KG.
COOPERATOR SOCIUS

Spport robot brand







