Omnes scimus quod cum robotis operari potest esse subtile, sed quando rectam informationem et aliquam exercitationem habes, facile esse potest. MINYUE hic est ut te doceat de tractando robot optimum modo quo fieri potest. Hoc monstratorium complectetur quomodo operari systema manipulandi robotis , quomodo motus eorum regere, et quomodo id secure et efficienter facere.
Primum, omnia de variis generibus robotorum. Sunt duo principia genera robotorum quae cognoscere oportet: roboti fixi et roboti mobilis. Cum de robotis fixis loquimur, hi sunt qui omnino non moventur. Saepius in fabris adhibentur ut componentes coniungant. Ex contrario, roboti mobilis ad navigandum per ambientes et transferendum conficiuntur. Hi roboti sunt forma mobilis robotarum quae communiter ad deferendum vel purgandum utuntur. Importat intelligere differentiam inter haec genera, quod te iuvat rectam optionem facere et aptum robotem pro opere quod facere debes eligere.
Nunc de controllo robotis MINYUE loquamur. Interfacing basicum ad movendum robotem potest esse iocus manubrium vel serie pulsatorum, quae ad motum in omnibus quattuor directionibus possunt uti. Exercitium cum controllis est necessarium, ut tibi consuescat quomodo robot moveatur et respondeat. Robot programmari potest scribendo fragmenta instructionum quae 'codex' vocantur. Hic codex dat instructiones roboti de modo movendi se ipsum et quibus occupationibus perficiendis. Ut robots domineris, oportet programmationem dominari, quae nunc est ars fundamentalis.
Est etiam necessitas ut robotessentia moveantur modis complexis, et hoc potest esse magis complicatum. Cum alia horum sint satis complicata, conamur ea in partes tractabiles dividere. Exempli gratia, praesupponimus te velle transferre robotem ab una extremitate camerae ad alteram. Fortasse oportebit te primum robotem reorientare ut recte sit versa. Tum eam paululum progredieris et deinde converteris, ut eam ubi opus est deducas. Hoc facit MINYUE robot manipulatores materiae automati facile regere robotem. Sensa quoque uti potes, quae robotem intelligere suum ambiantem sinunt. Sensa iuvant robotem obstacula vitare et melius navigare, tuum laborem ut conductoris faciliorum facientes.

Omnis tempus consumptum evitando peritiam in manipulatione robotorum est tempus perditum. Et quo magis exerceas, quo magis adsuesces ad robotem, tanto majorem fiduciam habebis dum illum regis. Potes etiam peritiorem fieri per refinementem programmationis robotis. Ille potest facere minutas correctiones in codice quem scripsisti ad meliorem motum robotis et efficientius agendum. Cum exercitio regulari et faciendo mutationes cum opus sit, tua peritia in manipulatione brachium roboticum conflatorem aucta magnopere erit.

Cum robotibus agendo, securitas est una ex maximis prioritatibus. Semper sequere regulas et proceduras securitatis ut tu et alii in tuto sitis. Cum robotibus operaris, melius est circumstantias cognoscere, quia interdum sine praenuntiatione movere possunt. Ad operationes optimo modo gerendas, certare ut robot aptus officium necessarium exsequatur. Exempli gratia, si res graves transferri debent, oportet uti robote ad levia portanda et ferenda descripto. Item, sensus et automatisma permittere vobis ut plus cum minus tempore et viribus efficere possitis. Automatisma aliquid ex opere vestro pro vobis facere potest, ita ut tempus servetis et laborem facilitatis causa efficiatis.
Velox, accuratus, prorsus Sine-Programmatione, alta efficentia et alta praecisio. Solvit complicatum processum doctrinae robotorum traditionalium et parcat temponi immobilitatis doctrinae.
Beijing Minyue Technology Co.,LTD, ut leading enterprise technologicum in applicatione non-manualis roboticae industrialis. Specializamur in fabrica intelligentia flexibili cum systemate nostro proprio RobotSmart - Systema Decisionum Intelligentium, SmartVision - Systema Visionis Binochali Structurae Luminis, et SmartEye - Systema Visionis Laser Trajectus Seguendi. Offertur nova generatio solutionum roboticarum intelligentium pro fusione et sectura.
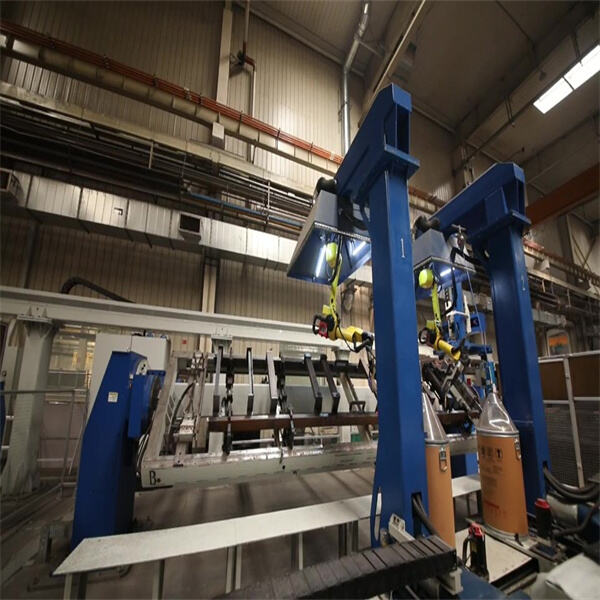
Praebet potentem praecipuum robotorum pro fusione, onusta frontali, laterali, inverso, montatura gantrii, planificatio itineris intelligentis pro multis robotis, multibus axibus externis, et positionario cooperando opere. Realizat simulationem motus robotici, detegit collisiones, vitat singularitates et deprehendit limites axium.
Adoptando functionem inveniendi et sequendi, scannandi fissuram fusionis, confirmandi positionem et informationem fissurae fusiva, corrigendi positionem fissurae fusionis inter disegnum digitalis 3D et opus reale, et solvendi problemata fissurae praeiudicantis propter errorem materialium introeuntium et deformationem thermicam.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









